
플랜지 I/O
로봇 끝 단 플랜지 커버에 M8사양의 8pin 커넥터가 1개 있으며 장착 위치 및 외형은 아래 그림을 참조하시기 바랍니다.

2022년 8월부터 생산된 제품은 아래 그림과 같이 외형과 커넥터 방향이 변경되었습니다.
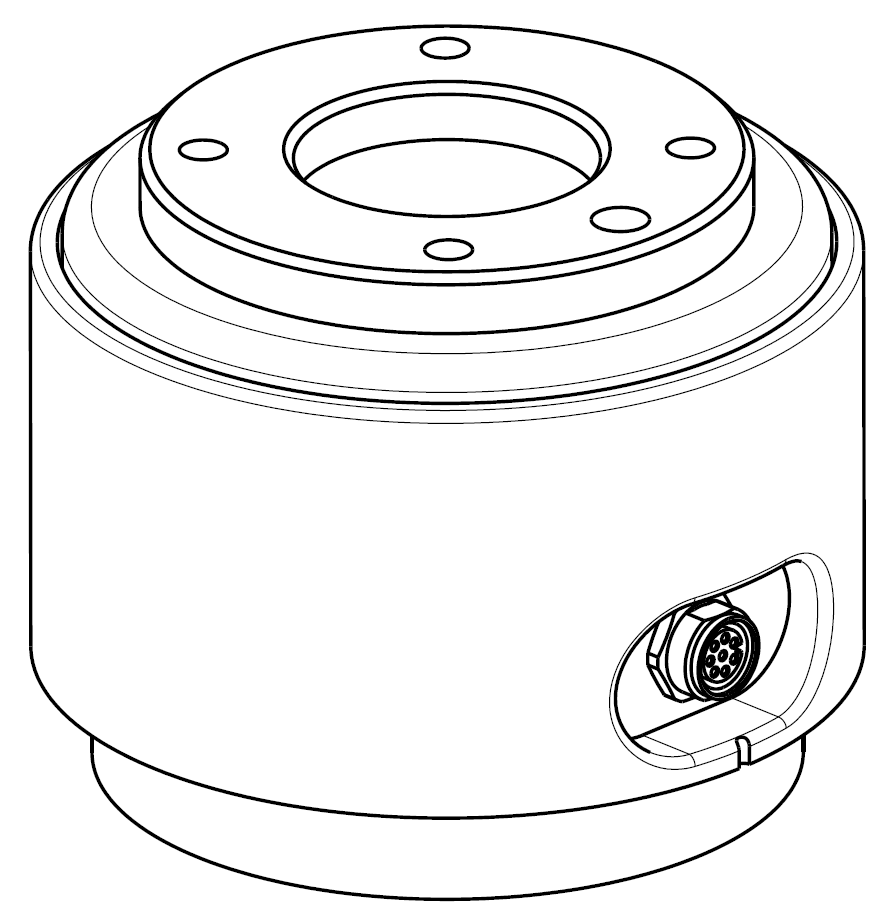
커넥터는 그리퍼나 특정 로봇 툴에 내장되어 있는 센서를 구동시키기 위한 전원과 제어 신호를 제공합니다. 아래 예시로 표시한 산업용 케이블과 같은 사양이 적용 가능합니다.
- Phoenix contact 1404178, male (Straight)
- Phoenix contact 1404182, male (Right Angle)
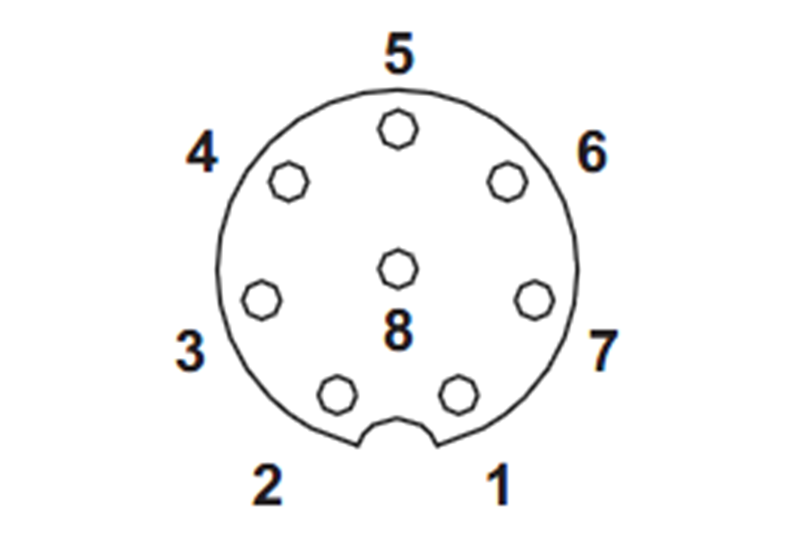
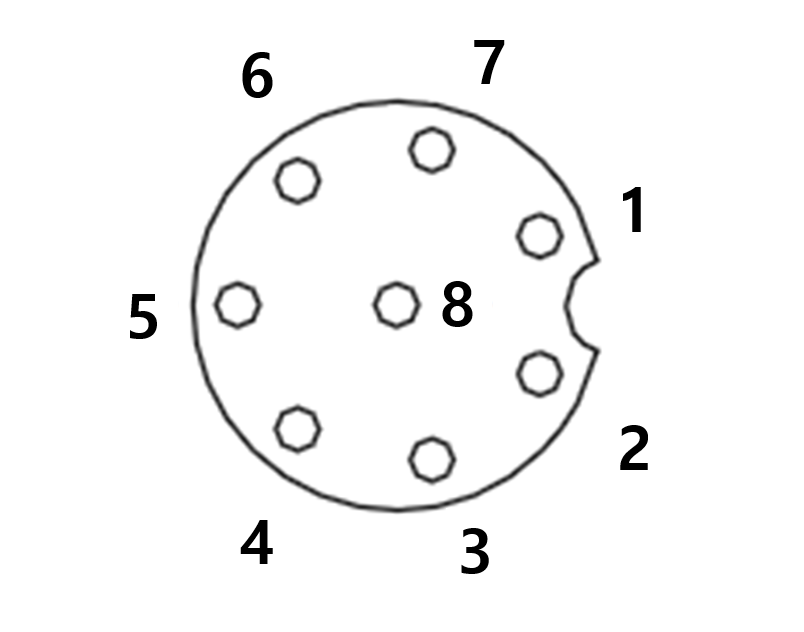
각 커넥터의 핀 맵은 다음과 같습니다.
Schematic Diagram
2022년 8월부터 생산된 제품은 아래 그림과 같이 외형과 커넥터 방향이 변경되었습니다.
로봇 끝 단 플랜지 커버에 M8사양의 8pin 커넥터가 1개 있으며 장착 위치 및 외형은 아래 그림을 참조하시기 바랍니다.
X1, 커넥터 각각 제공하는 I/O 기능이 상이하며 상세한 I/O 구성은 아래 표를 참조하시기 바랍니다.
X1 구성(디지털 IN/OUTPUT, RS 485)
No | Signal | Note |
|---|---|---|
1 | RS485 A | Mfg date
|
2 | RS485 B | |
3 | 디지털 Output 1 | |
4 | 디지털 Output 2 | |
5 | +24V | |
6 | 디지털 Input 2 | |
7 | 디지털 Input 1 | |
8 | GND |
X1 구성(디지털 IN/OUTPUT, RS 485)
2020.01.21 이후부터 하기와 같이 변경되었습니다.
No | Signal | Note |
|---|---|---|
1 | 디지털 Input 1 | Mfg date
Mfg date
그 외 적용 호기
|
2 | 디지털 Output 1 | |
3 | 디지털 Output 2 | |
4 | RS485 A | |
5 | +24V | |
6 | RS485 B | |
7 | 디지털 Input 2 | |
8 | GND |
주의
- 생산 일자(로봇 라벨 mfg date)에 따른 I/O의 구성 확인 후 Tool과 그리퍼를 구성하십시오.
- 두산 로봇랩에서 확인하실 수 있습니다. (https://robotlab.doosanrobotics.com)
- 위에서 제시한 I/O 구성을 무시한 채 로봇 툴을 구동하게 되면 제품의 영구적인 손상을 초래 할 수 있습니다.
플랜지 I/O 내부 전원은 24V로 설정이 되어 있으며 상세 전원 사양은 아래 표를 참조하시어 I/O 연결 바랍니다.
Parameter | Min | Typ | Max | Unit |
|---|---|---|---|---|
Supply voltage | - | 24 | - | V |
Supply current | - | 2 | 3 | A |
디지털 output | - | 2 | - | EA |
디지털 input | - | 2 | - | EA |
경고
- 전원 차단 시 어떠한 위험상황이 발생하지 않도록 Tool과 그리퍼를 구성하십시오.
(예를 들어 툴에서부터 work-piece가 낙하하는 상황) - 로봇 전원인가 시 각 커넥터의 5번 단자는 항시 24V가 출력되고 있으므로 툴과 그리퍼 구성 시 로봇 전원을 차단하고 작업하십시오.