
로봇 툴을 기준으로 실행하기

로봇의 툴을 기준으로 로봇을 이동하는 방법은 다음과 같습니다.
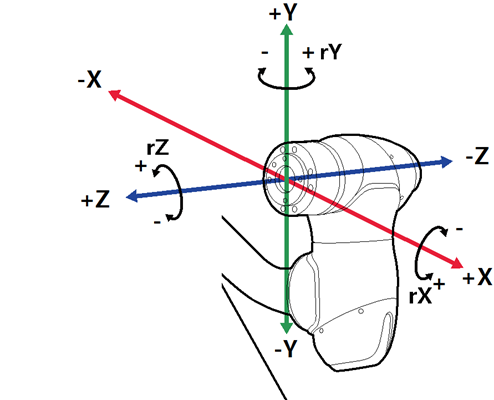
- 조그 화면에서 참조 좌표계를 툴로 설정하십시오.
- 태스크 패널에서 각도를 조절할 축(X~RX)을 선택하십시오.
- 방향 버튼(+,_)을 길게 눌러 해당 축을 이동하십시오.
알아두기
- 안전 지역은 가상 모드에서 적용되지 않습니다.
- Rx, Ry, Rz는 TCP(Tool Center Position) 기준으로 실행됩니다.
로봇의 툴을 기준으로 로봇을 이동하는 방법은 다음과 같습니다.
알아두기