
월드 좌표계(World Coordinates) 설정
로봇 및 작업대상을 포함한 작업영역을 대표하는 좌표계를 설정할 수 있습니다. 이 좌표계를 월드 좌표계라 하며 로봇의 Base에 고정된 베이스 좌표계와 구분됩니다. 월드 좌표계를 기준으로 베이스 좌표계의 포즈를 설정할 수 있으며 태스크 빌더 및 태스크 라이터에서 로봇을 이용하여 교시하고 움직임을 지정할 때에도 월드 좌표계를 선택할 수 있습니다. 월드 좌표계를 설정하려면 로봇 워크셀에서 
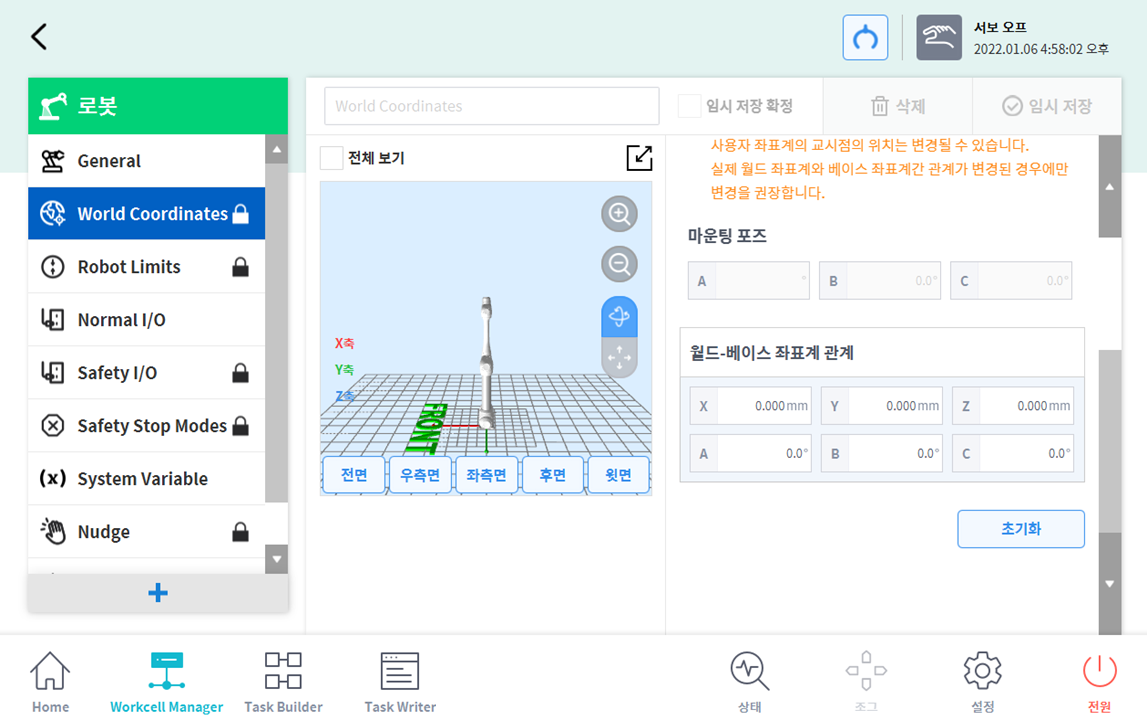
- 설정을 위해 상단의 편집을 탭하십시오.
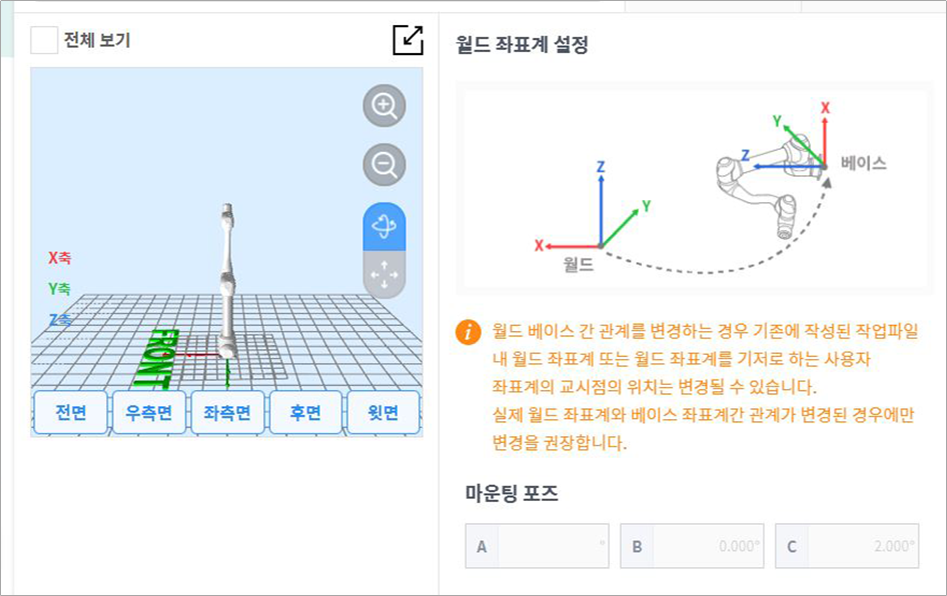
월드 좌표계와 베이스 좌표계의 관계를 나타낸 그림과 주의사항을 꼭 참조하여 주십시오.
경고
월드 베이스 간 관계를 변경하는 경우 기존에 작성된 작업파일 내 월드 좌표계 또는 월드 좌표계를 기저로 하는 사용자 좌표계의 교시점의 위치는 변경될 수 있습니다. 실제 월드 좌표계와 베이스 좌표계간 관계가 변경된 경우에만 변경을 권장합니다.
- 우측 중단에 사용자가 설정한 마운팅 포즈(설치기울기)가 표시됩니다. 일반적으로 월드 좌표계는 사용자의 기준에서 작업환경을 기술하므로 월드 좌표계의 Z방향은 천정을 항합니다. 베이스 좌표계는 로봇의 1축 하단평면에 고정되어 있는 좌표계이므로 로봇의 설치위치/자세에 따라 월드 좌표계-베이스 좌표계 관계는 변경됩니다. 상기 그림의 경우는 벽에 로봇을 장착한 상황을 가정한 것입니다. 이 경우 베이스 좌표계의 Z축은 벽에 수직인 방향으로 그림에서는 월드 좌표계의 Y축의 방향과 나란히 놓이게 되며 마운팅포즈는 기울기 90도, 회전 0도로 표시됩니다. 월드-베이스간 관계는 월드 좌표계를 기준으로 베이스 좌표계를 바라본 관계입니다. 사전에 정해진 작업환경의 레이아웃이 있다면 그에 따라서 설정하십시오. X/Y/Z값은 이동을 A/B/C값은 Euler Z-Y-Z정의의 회전을 의미합니다. 로봇의 설치상황에 따라 마운팅포즈를 설정하였다면, 회전각도 B/C는 마운팅포즈의 B/C를 사용하는 것이 적절합니다. 다만, 자동추정기능을 이용하여 마운팅포즈를 설정한 경우 추정값은 오차를 포함할 수 있기 때문에 레이아웃에 정의된 회전각을 따르는 것이 좋습니다.
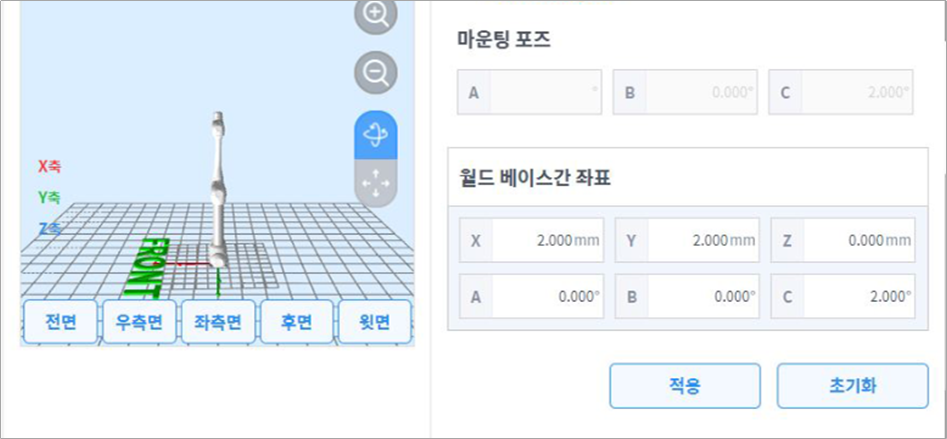
- 적용 버튼을 탭 하십시오.
- 확인 버튼을 탭 하십시오.
알아두기
SW버전 GF020400 이전 버전에서 설치 기울기를 적용한 후 태스크 빌더 및 태스크 라이터에서 작성한 작업자 프로그램은 GF020400 이후 버전으로 업데이트 시에 설치 기울기를 반영하여 월드 좌표계를 설정하고 작성한 프로그램 내에 설정한 베이스(BASE) 좌표계를 모두 월드 좌표계로 변환하여야 기존의 교시점을 동일하게 사용할 수 있습니다
여러 대의 로봇으로 공동의 작업공간에서 작업하거나 모바일베이스 또는 리니어트랙과 같이 움직이는 장치에 로봇이 설치된 경우 작업물과 로봇 Base와의 관계 및 교시점의 위치가 변동될 수 있으며 이러한 상황에서 작업을 티칭하며 공유하기 용이한 월드 좌표계를 설정할 수 있습니다.
로봇에 툴을 처음 설치하거나 툴이 변경되었을 경우에는 로봇을 사용하기 전에 툴 무게를 설정해야 합니다. 툴 무게 설정에 대한 자세한 내용은 Tool Weight(툴 무게) 설정 을 참조하십시오.