
사용자 좌표계(User Coordinates) 설정
작업대상을 대표하는 좌표계를 설정할 수 있습니다. 이 좌표계를 사용자 좌표계라 하며 로봇의 베이스, 월드 좌표계와 구분됩니다. 베이스 또는 월드 좌표계를 기준으로 사용자 좌표계의 포즈를 설정할 수 있으며 태스크 빌더 및 태스크 라이터에서 로봇을 이용하여 교시하고 움직임을 지정할 때에도 사용자 좌표계를 선택할 수 있습니다. 사용자 좌표계를 설정하려면 로봇 워크셀에서 
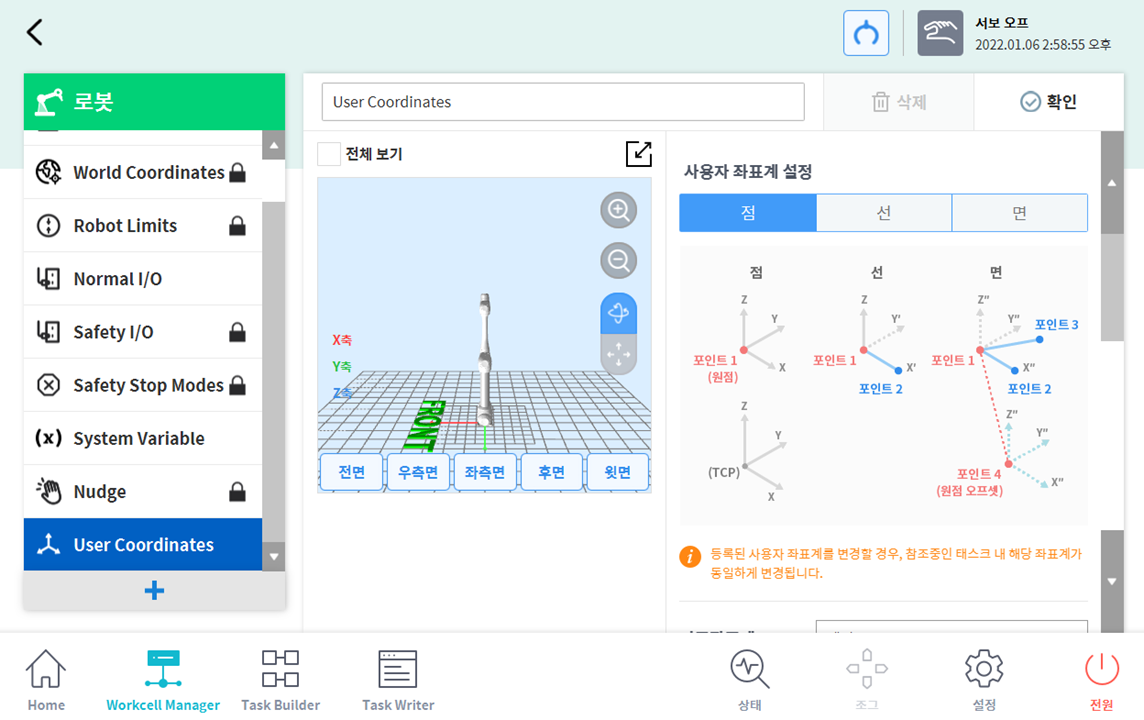
- 설정을 위해 필요한 값들을 입력해주세요.
- 사용자 좌표계 설명 이미지와 주의사항을 꼭 참조하여 주십시오.
- 사용자 좌표계는 한 점, 두 점, 세 점을 기준으로 생성가능합니다.
- 고급 옵션에서 팔레트 좌표를 불러와 사용자 좌표계 포인트에 적용 가능합니다.