
플랜지 I/O
로봇 끝 단 플랜지 커버에 M8사양의 8pin 커넥터가 1개 있으며 장착 위치 및 외형은 아래 그림을 참조하시기 바랍니다.
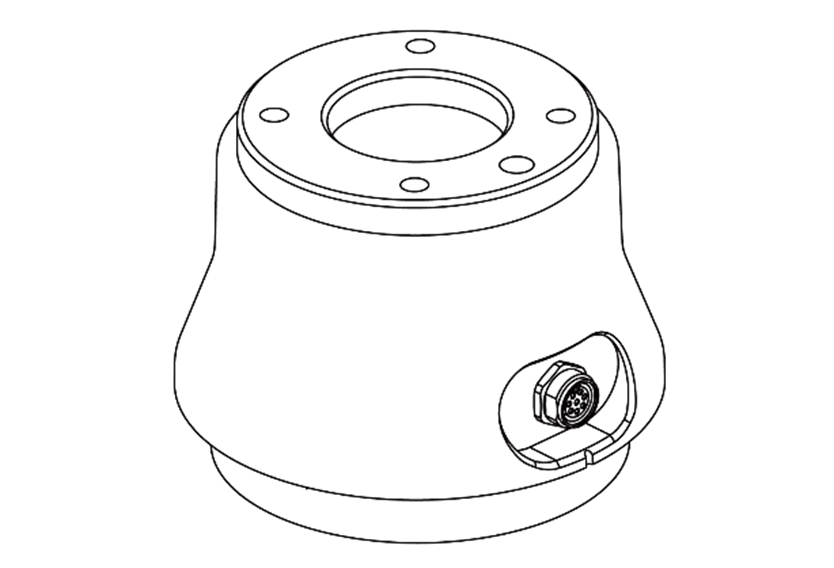
커넥터는 그리퍼나 특정 로봇 툴에 내장되어 있는 센서를 구동시키기 위한 전원과 제어 신호를 제공합니다. 아래 예시로 표시한 산업용 케이블과 같은 사양이 적용 가능합니다.
- Phoenix contact 1404178, male (Straight)
- Phoenix contact 1404182, male (Right Angle)
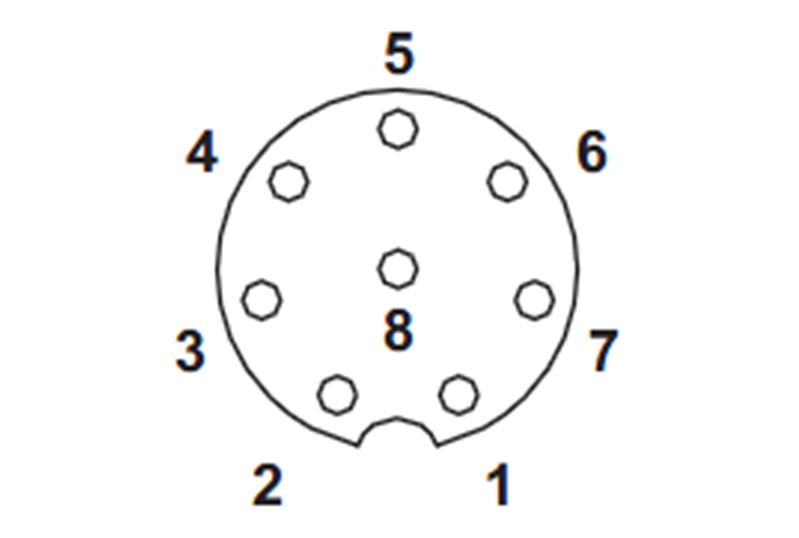
각 커넥터의 핀 맵은 다음과 같습니다.
Schematic Diagram
로봇 끝 단 플랜지 커버에 M8사양의 8pin 커넥터가 1개 있으며 장착 위치 및 외형은 아래 그림을 참조하시기 바랍니다.
X1, 커넥터 각각 제공하는 I/O 기능이 상이하며 상세한 I/O 구성은 아래 표를 참조하시기 바랍니다.
X1 구성(디지털 IN/OUTPUT, RS 485)
No | Signal | Note |
|---|---|---|
1 | RS485 A | Mfg date
|
2 | RS485 B | |
3 | 디지털 Output 1 | |
4 | 디지털 Output 2 | |
5 | +24V | |
6 | 디지털 Input 2 | |
7 | 디지털 Input 1 | |
8 | GND |
X1 구성(디지털 IN/OUTPUT, RS 485)
2020.01.21 이후부터 하기와 같이 변경되었습니다.
No | Signal | Note |
|---|---|---|
1 | 디지털 Input 1 | Mfg date
Mfg date
그 외 적용 호기
|
2 | 디지털 Output 1 | |
3 | 디지털 Output 2 | |
4 | RS485 A | |
5 | +24V | |
6 | RS485 B | |
7 | 디지털 Input 2 | |
8 | GND |
주의
- 생산 일자(로봇 라벨 mfg date)에 따른 I/O의 구성 확인 후 Tool과 그리퍼를 구성하십시오.
- 두산 로봇랩에서 확인하실 수 있습니다. (https://robotlab.doosanrobotics.com)
- 위에서 제시한 I/O 구성을 무시한 채 로봇 툴을 구동하게 되면 제품의 영구적인 손상을 초래 할 수 있습니다.
플랜지 I/O 내부 전원은 24V로 설정이 되어 있으며 상세 전원 사양은 아래 표를 참조하시어 I/O 연결 바랍니다.
Parameter | Min | Typ | Max | Unit |
|---|---|---|---|---|
Supply voltage | - | 24 | - | V |
Supply current | - | 2 | 3 | A |
디지털 output | - | 2 | - | EA |
디지털 input | - | 2 | - | EA |
경고
- 전원 차단 시 어떠한 위험상황이 발생하지 않도록 Tool과 그리퍼를 구성하십시오.
(예를 들어 툴에서부터 work-piece가 낙하하는 상황) - 로봇 전원인가 시 각 커넥터의 5번 단자는 항시 24V가 출력되고 있으므로 툴과 그리퍼 구성 시 로봇 전원을 차단하고 작업하십시오.