순응(Compliance) 명령어 예제 따라하기
OPTIONAL NORMAL 20 MIN

주의
- 예제를 시작하기 전에 반드시 사용 시 주의사항 을 확인하십시오. 자세한 내용은 PART 1. 안전 매뉴얼 을 참조하십시오.
알아두기
- 순응 제어를 켜거나 끌 때 15Nm 이상의 외부 토크가 있으면 로봇은 JTS(Joint Torque Sensor) 오류로 프로그램을 정지합니다.
- 강성(stiffness) 변경(Change)은 외부 토크의 크기와 관계없이 실행 할 수 있습니다.
- 순응 제어 중에는 MoveJ 명령어와 같은 조인트 모션을 수행할 수 없습니다.
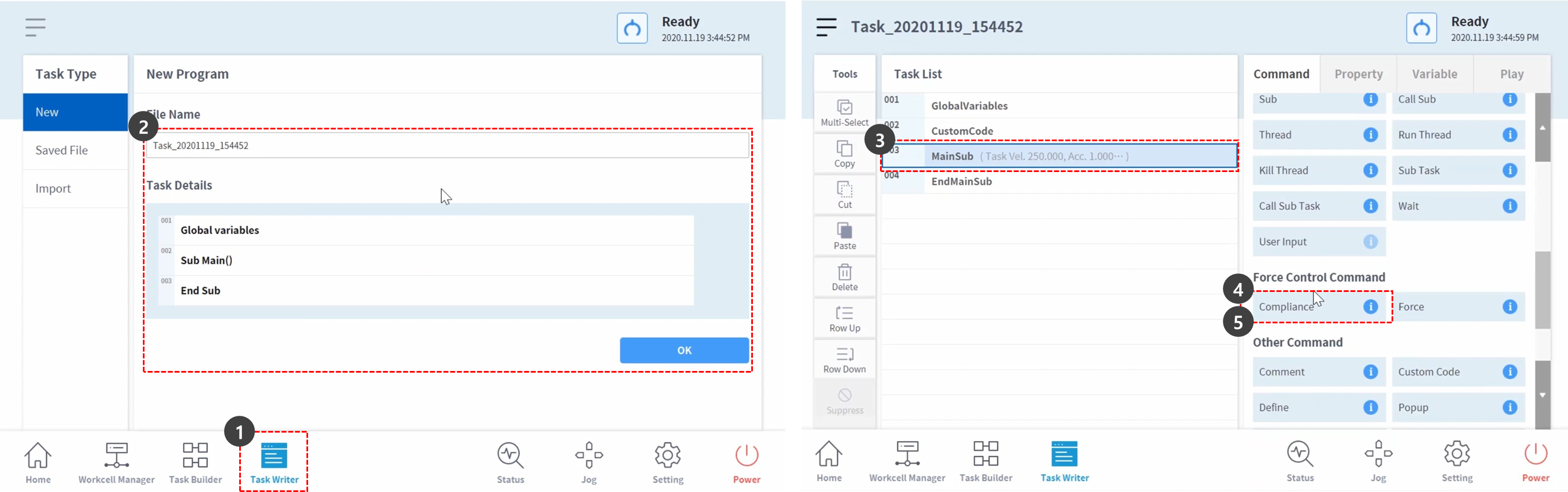
- 하단 메뉴에서 태스크 라이터(Task Writer)를 선택하십시오.
- 태스크 이름을 지정하고 확인(OK) 버튼을 누르십시오.
- 태스크 리스트에서 3번 줄의 MainSub 명령어를 선택하십시오. 선택한 줄의 다음 줄에 새로운 명령어가 추가됩니다.
- Compliance 명령어를 추가하십시오. 이 명령어는 순응 제어(Compliance Control)을 활성화하는데 사용될 예정입니다.
- Compliance 명령어를 한 개 더 추가하십시오. 이 명령어는 순응 제어(Compliance Control)을 비활성화하는데 사용될 예정입니다.
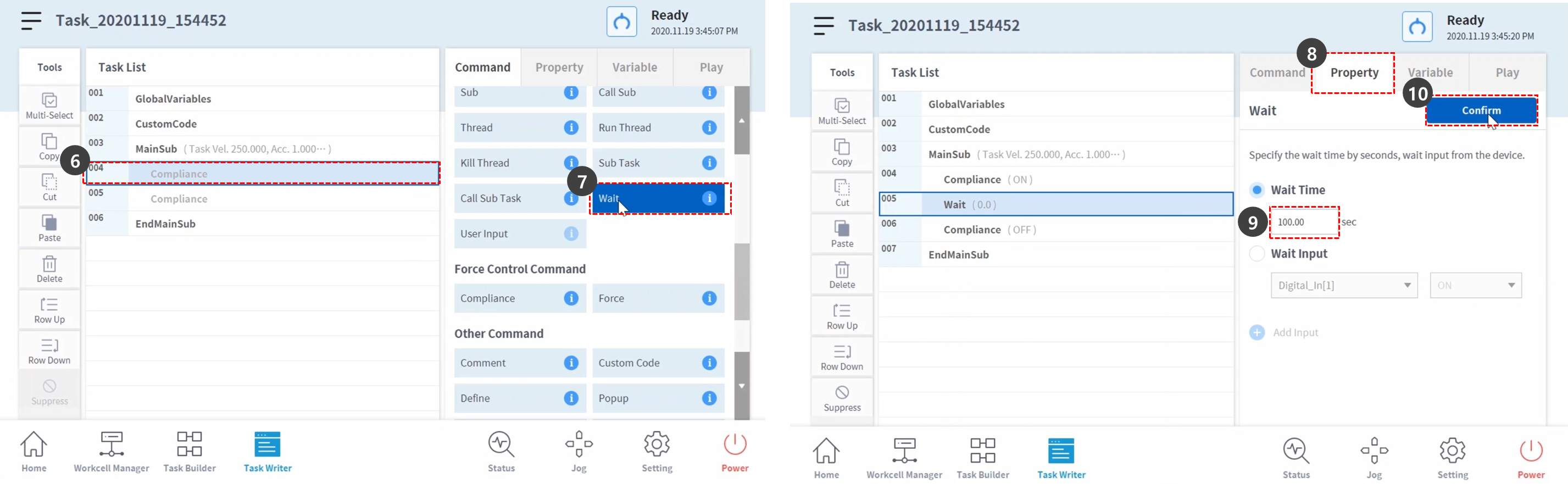
- 4번 줄의 Compliance 명령어를 선택하십시오. 선택한 줄의 다음 줄에 새로운 명령어가 추가됩니다.
- Wait 명령어를 추가하십시오.
- 속성(Property) 탭을 선택하십시오.
- Wait Time을 다음과 같이 설정합니다.
- Wait Time : 100 sec
- 확인(Confirm) 버튼을 누르십시오.
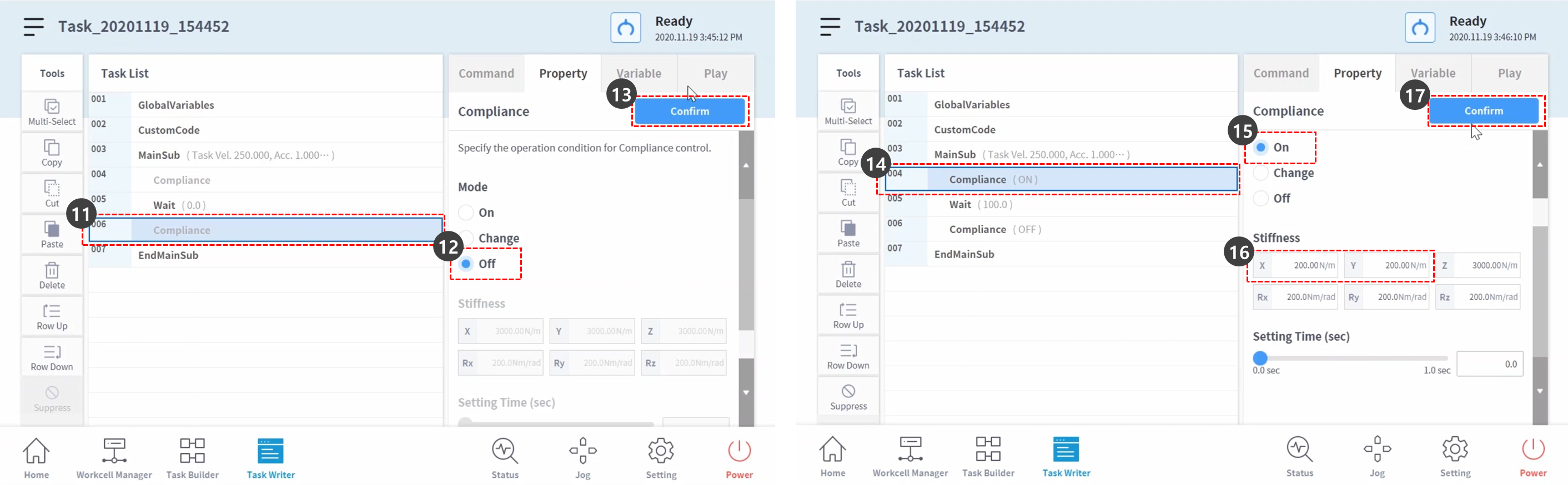
- 6번 줄의 Compliance 명령어를 선택하십시오.
- 속성(Property)에서 Mode를 다음과 같이 설정합니다. Mode Off는 순응 제어를 비활성화 합니다.
- Mode : Off
- 확인(Confirm) 버튼을 누르십시오.
- 4번 줄의 Compliance 명령어를 선택하십시오.
- 속성(Property)에서 Mode를 다음과 같이 설정합니다. Mode On은 순응 제어를 활성화 합니다.
- Mode : On
- 강성(Stiffness)를 다음과 같이 설정합니다. X, Y 방향의 강성을 낮추어 X, Y 방향으로 조금 더 물렁하게 반응하도록 하겠습니다.
- X : 200 N/m
- Y : 200 N/m
- Z : 3000 N/m (default)
- Rx, Ry, Rz : 200 Nm/rad (default)
- 확인(Confirm) 버튼을 누르십시오.
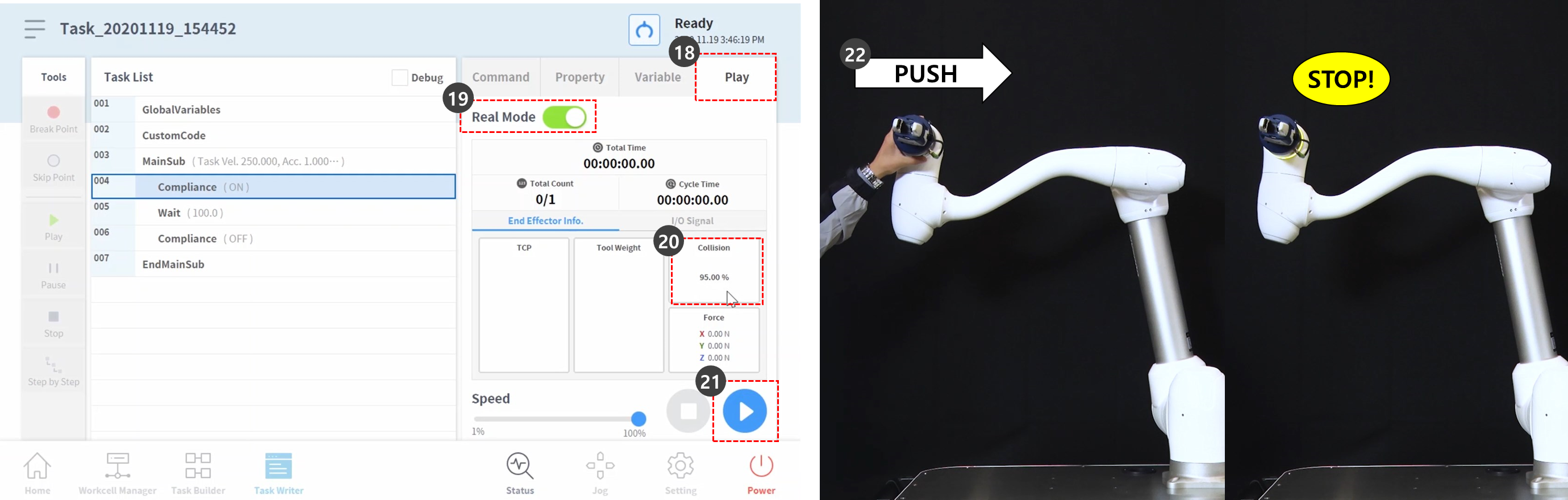
- 실행(Play) 탭을 선택하십시오.
- 실제 모드(Real Mode) 토글 버튼을 활성화 시키십시오.
- 토글 버튼이 활성화되면 버튼이 초록색으로 표시됩니다.
- 이 예제에서는 순응 제어 사용 시 충돌 민감도(Collision Sensitivity)를 낮춰야 하는 이유를 설명하기 위해 일부러 안전 정지상태로 정지하도록 합니다. 현재 이 예제에서 설정되어있는 충돌 민감도(Collision Sensitivity)는 95% 입니다. 이렇게 높게 설정된 충돌 민감도의 경우 로봇이 충돌에 매우 민감하게 반응합니다.
- 충돌 시 로봇은 안전 정지 상태로 정지합니다.
- 실행 버튼을 누르십시오.
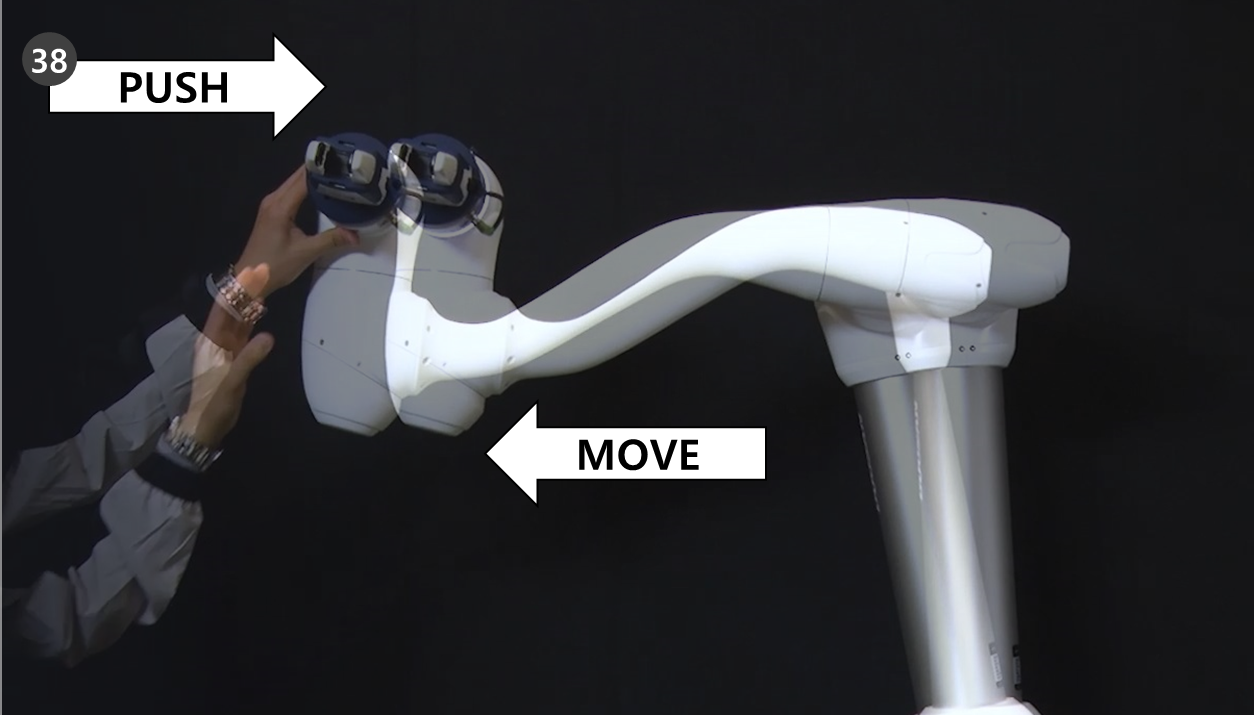
- 로봇의 끝 단을 잡고 로봇의 몸체 방향으로 천천히 밀어보십시오. 로봇은 충돌 에러가 발생하면서 멈추게 됩니다. 충돌에 의한 안전 정지 상태에서 로봇의 LED 색상은 노란색으로 표시됩니다.
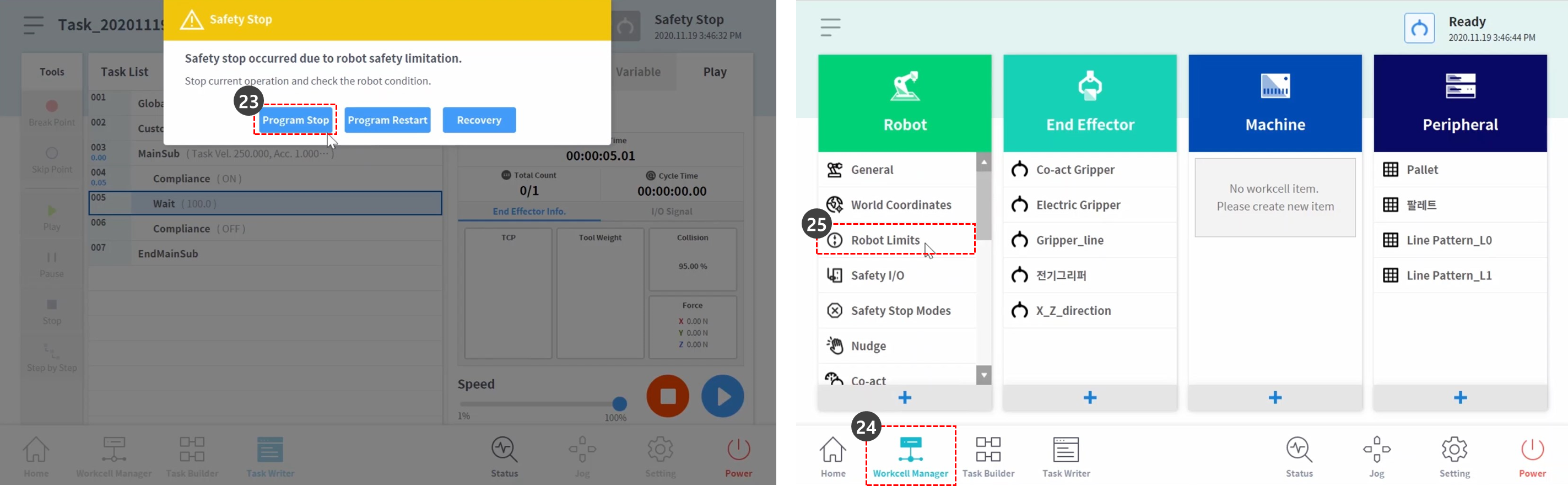
- 화면에서 노란색 안전 정지 경고 창에서 Program Stop 버튼을 누르십시오. 실행 중인 태스크 프로그램이 중지 됩니다.
- 하단 메뉴에서 워크셀 매니저(Workcell Manager)를 선택하십시오.
- Robot > 로봇 제한치(Robot Limits)를 선택하십시오.
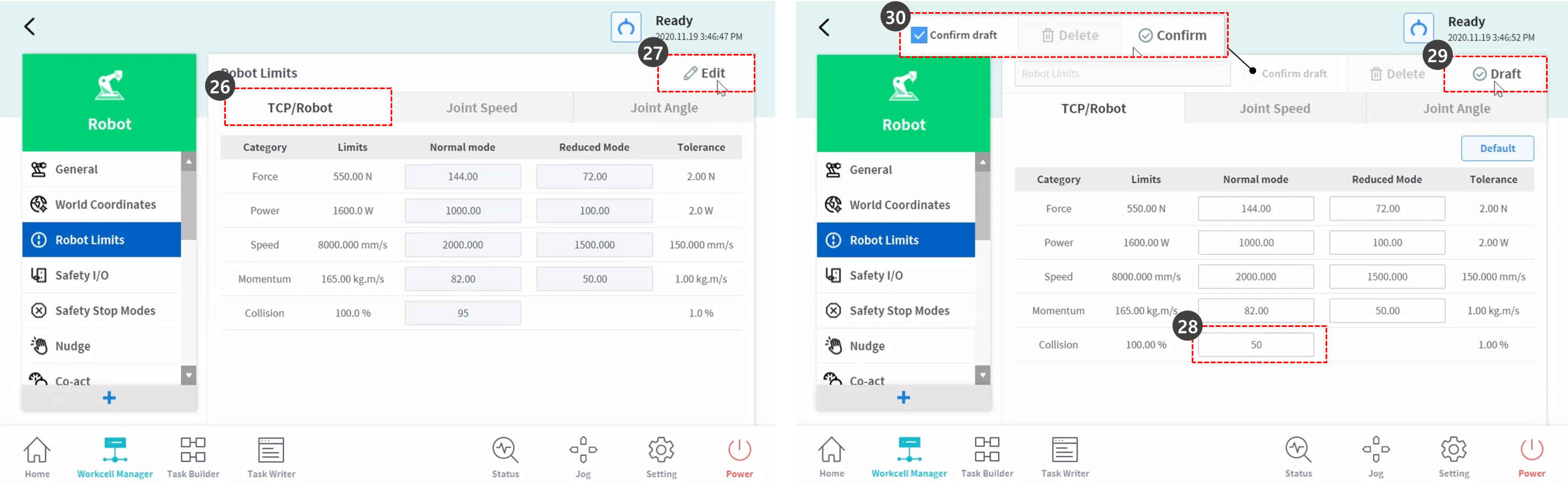
- TCP/Robot 탭을 선택하십시오.
- 편집(Edit) 버튼을 누르십시오.
- 충돌 민감도(Collision Sensitivity)를 다음과 같이 변경하십시오.
- 일반 모드(Normal mode) : 50 %
- 임시 저장(Draft)를 누르십시오.
- 임시 저장 확정(Confirm draft) 체크 박스를 체크한 후 확인(Confirm) 버튼을 누르십시오.
- 하단 메뉴에서 태스크 라이터(Task Writer)를 선택하십시오.
- 화면 좌측에 저장된 파일(Saved file)을 선택하십시오.
- 첫 번째 태스크의 파일명이 과정 2번에서 지정한 태스크 이름이 맞는지 확인한 후 선택하십시오. 마지막으로 저장한 태스크가 태스크 라이터 파일 리스트의 가장 위쪽에 위치합니다.
- 열기(Open) 버튼을 누르십시오.
- 실행(Play) 탭을 선택하십시오.
- 실제 모드(Real Mode) 토글 버튼을 활성화 시키십시오.
- 실행 버튼을 누르십시오.
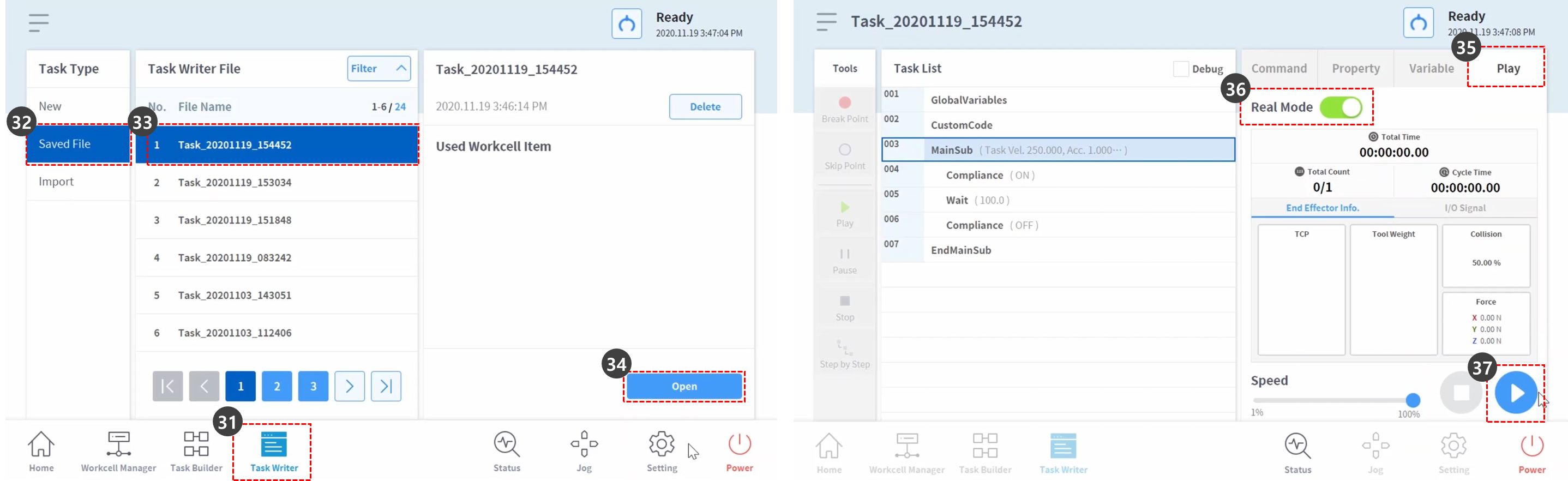
- 로봇의 끝 단을 잡고 로봇의 몸체 방향으로 천천히 밀어보십시오. 로봇이 미는 힘에 의해 이동했다가 다시 원래 위치로 복귀합니다.