디버깅 활용하기
OPTIONAL NORMAL 5 MIN
티치펜던트에서는 태스크 빌더/태스크 라이터에서 작성된 태스크 프로그램에 대해 디버깅 기능을 제공합니다.
- 디버깅이란 작성한 코드에서 버그를 제거하는 것을 의미합니다.
- 디버깅 기능은 앱에서 버그를 찾고 수정하는 데 사용되는 필수 도구입니다.
이 설명은 태스크 빌더 기준으로 디버깅 화면과 기능 및 사용 방법을 설명하지만 태스크 라이터에서 동일한 방법으로 디버깅 기능을 사용할 수 있습니다.
알아두기
- 태스크 실행 및 디버그 실행을 위해서는 로봇이 반드시 서보 온 상태여야 합니다. 하단의 상태(Status) > Servo On 버튼을 눌러 로봇을 서보 온 상태로 만들 수 있습니다.
- 태스크 빌더(Task Builder)에서 디버깅하고자 하는 태스크 프로그램을 엽니다.
- 태스크 리스트가 디버깅하고자 하는 태스크인지 확인합니다.
- 화면 우측의 실행(Play) 탭을 선택하십시오.
- 디버그(Debug) 체크 박스를 체크 상태로 선택하십시오.
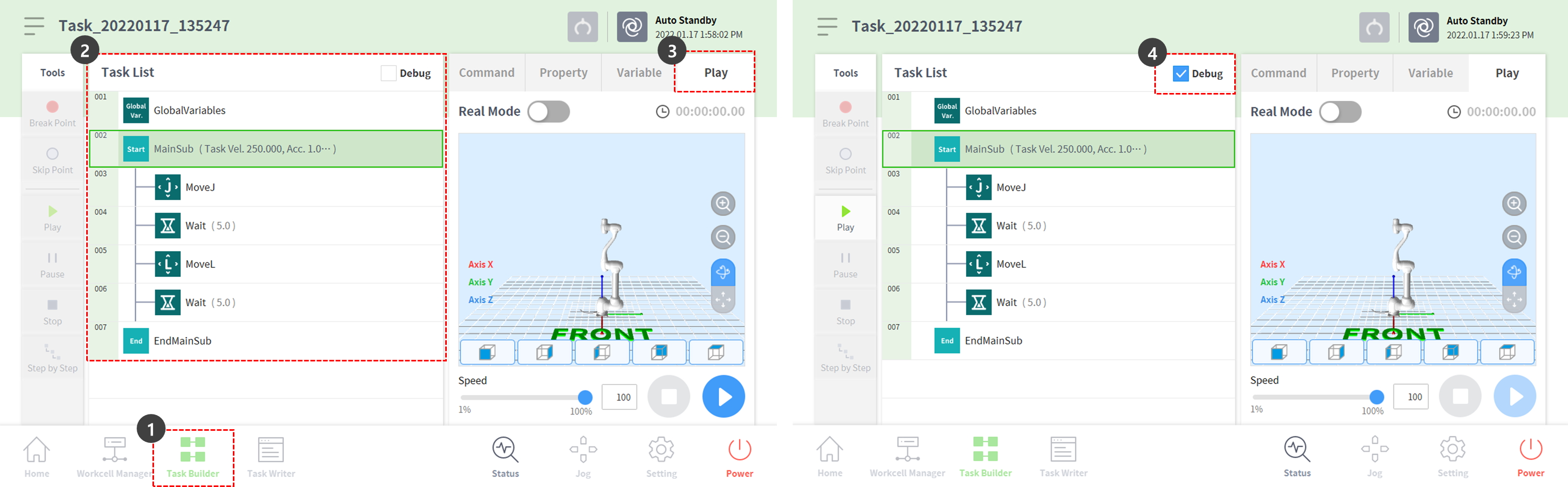
- 좌측의 도구(Tools) 메뉴는 다음과 같은 디버깅 기능을 제공합니다.
- 브레이크 지점(Break Point) : 중단점이라고 부르며 프로그램을 의도적으로 멈추는 지점을 의미합니다. 선택된 명령어 줄에서 명령어가 실행되기 전에 프로그램이 일시 정지 됩니다.
- 스킵 지점(Skip Point) : 프로그램 실행 중 의도적으로 건너뛰는 지점을 의미합니다. 선택된 명령어 줄의 명령어는 실행되지 않고 다음 줄의 명령어가 실행됩니다.
- 실행(Play) : 프로그램 실행과 동일한 기능을 갖는 디버그 실행 버튼입니다. 차이점은 디버그 실행 시 브레이크 지점 및 스킵 지점이 동작합니다.
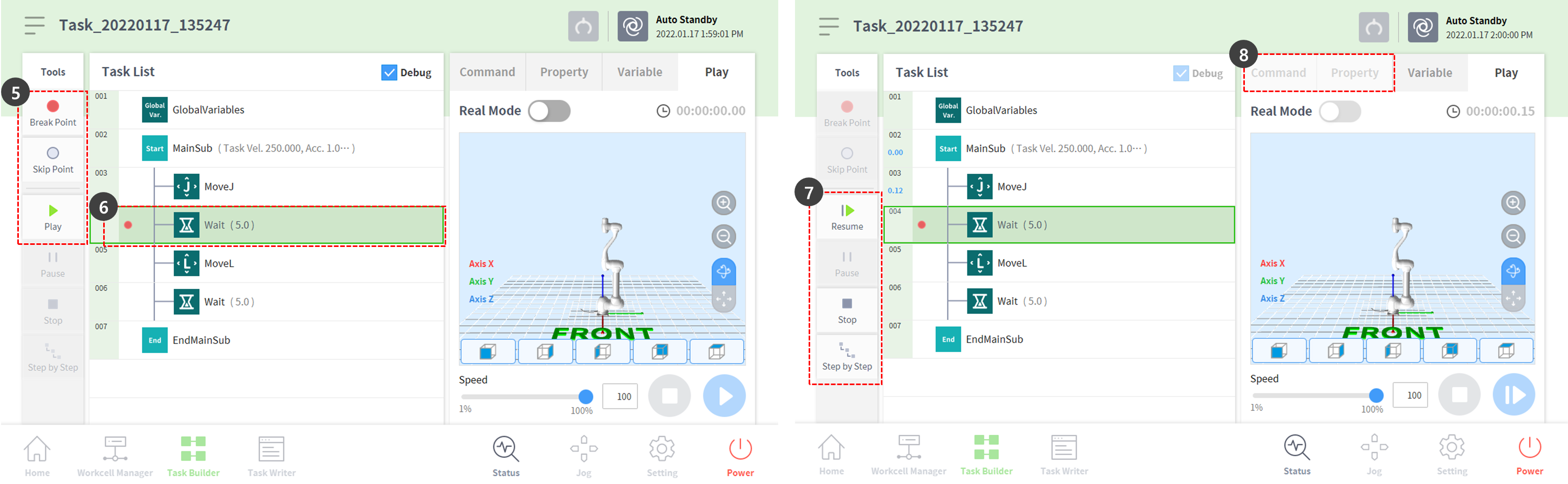
- 디버그를 원하는 명령어 줄을 선택한 후 브레이크 지점 버튼을 눌러 브레이크 지점을 추가합니다.
- 도구(Tools) > 실행 버튼을 눌러 디버그를 실행하면 프로그램은 브레이크 지점에서 해당 명령어가 실행되기 전에 일시 정지합니다. 일시 정지 상태에서 도구(Tools) 메뉴는 다음과 같은 디버깅 기능을 제공합니다.
- 재시작(Resume) : 일시 정지된 명령어를 해당 명령어 줄에서 이어서 실행합니다.
- 정지(Stop) : 프로그램의 디버그 실행을 종료합니다.
- 단계별(Step by Step) : 일시 정지된 명령어의 해당 명령어 줄을 한 줄만 실행합니다. 다음 명령어 줄에서 다시 일시 정지합니다.
- 디버그가 완료되면 명령어(command) 혹은 속성(Property) 탭에서 수정해야 할 사항을 수정한 후 다시 디버깅을 진행합니다.