로봇 모션의 속성 이해하기
MENDATORY NORMAL 15 MIN
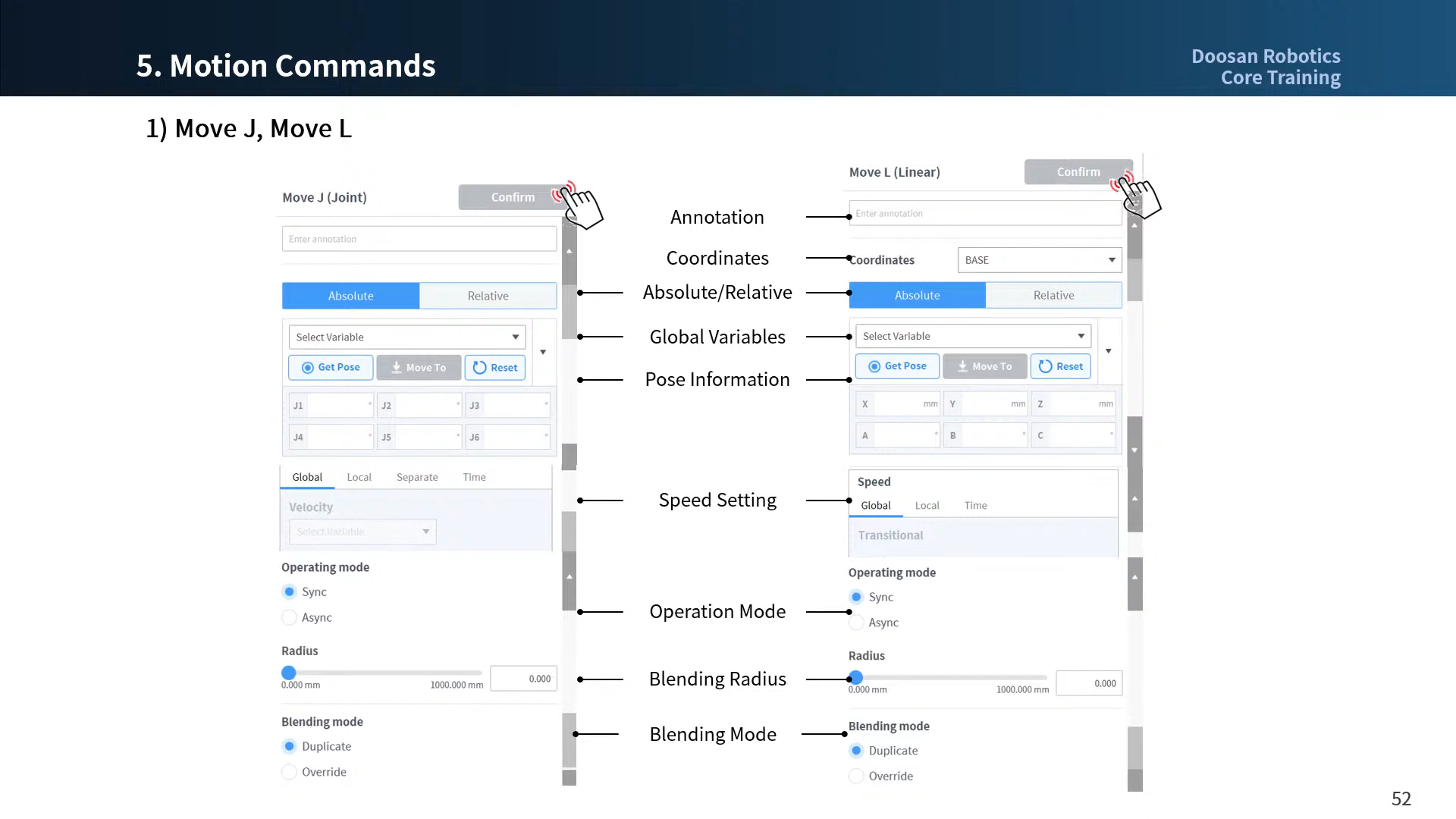
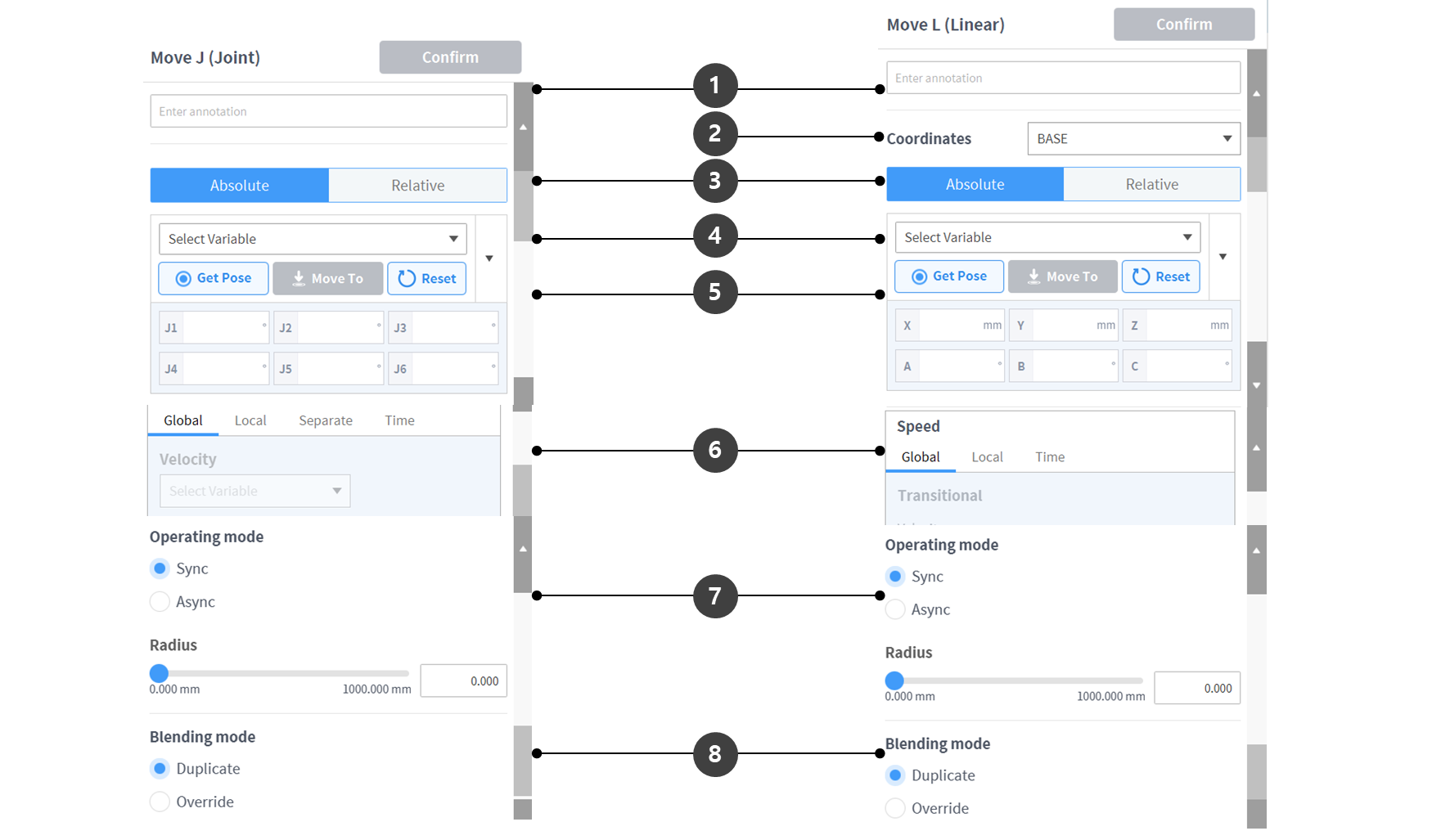
- 최소한의 설정으로 모션을 생성하는 경우 자세 정보(아래 그림의 5번)만 입력하시면 됩니다.
| 이름 | 설명 | |
|---|---|---|
| 1 | 주석(Annotation) | Task 창에서 확인이 명령어의 설명 또는 주석 |
| 2 | 기준 좌표계(Coordinates) |
|
| 3 | 이동 유형 선택 |
|
| 4 | 변수 선택 | 변수로 등록된 자세(Pose) 정보를 선택 가능 |
| 5 | 자세(Pose) 정보 | 자세(Pose) 정보를 입력 받음
|
| 6 | 속도 설정(Speed Setting) |
|
| 7 | 구동 모드(Operation Mode) |
|
| 8 | 블렌딩 모드(Blending Mode) | 선행 모션의 옵션에 반경(Radius)을 적용했을 때 후행 모션의 블렌딩 모드(Blending Mode)에 따라 선행 모션을 유지할지 선행 모션을 무시하고 덮어쓰는 방식으로 후행 모션을 실행할지를 결정하는 옵션 |
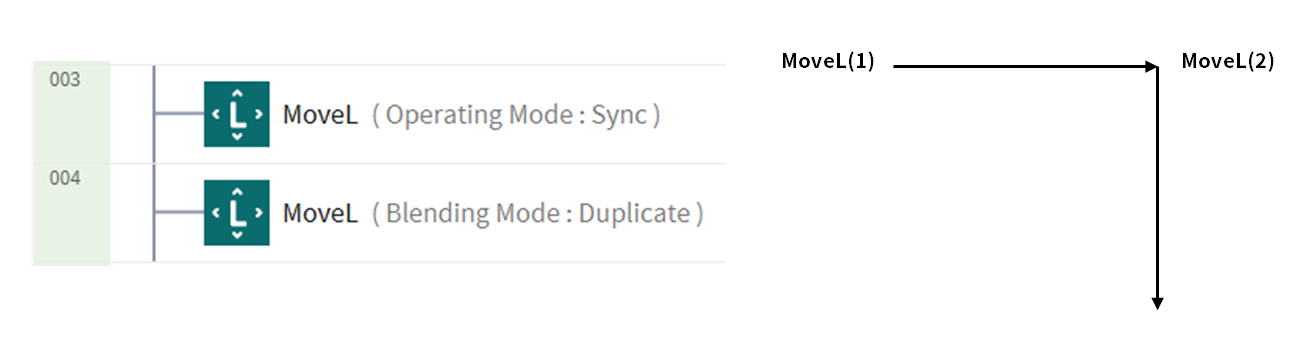
모션 작동 모드(Operating Mode)
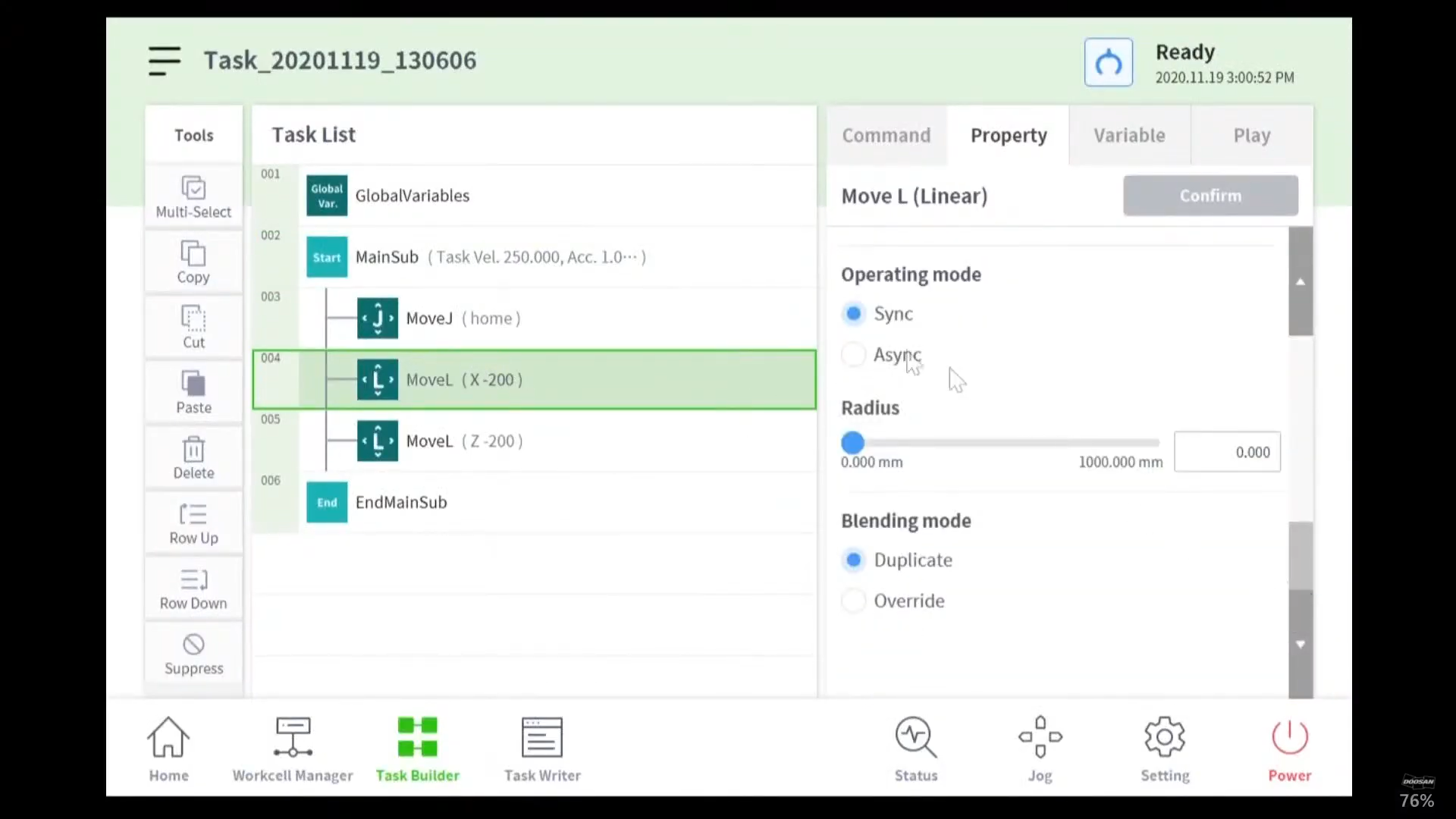
동기 (Sync)
동기(Sync)는 실행 중인 모션 명령어가 완전히 끝난 후 다음 명령어로 이동합니다. 기본 값으로 설정된 모드이고 일반적인 상황에 사용됩니다.
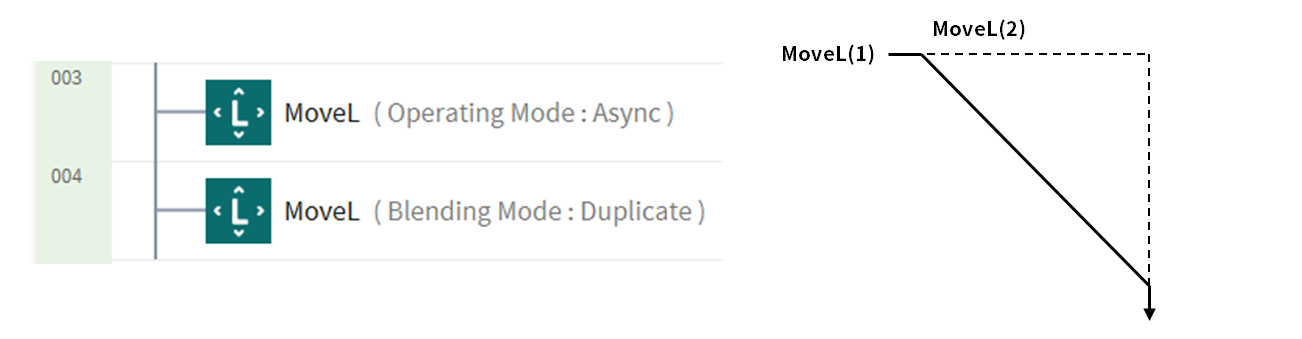
비동기 (Async)
비동기(Async)는 모션 명령어가 시작함과 동시에 다음 명령어를 실행합니다. 주로 모션 간의 부드러운 연결을 위해 사용되고 힘 제어, 모션의 시작과 동시에 시그널 출력 On/Off하는 경우에 활용됩니다.
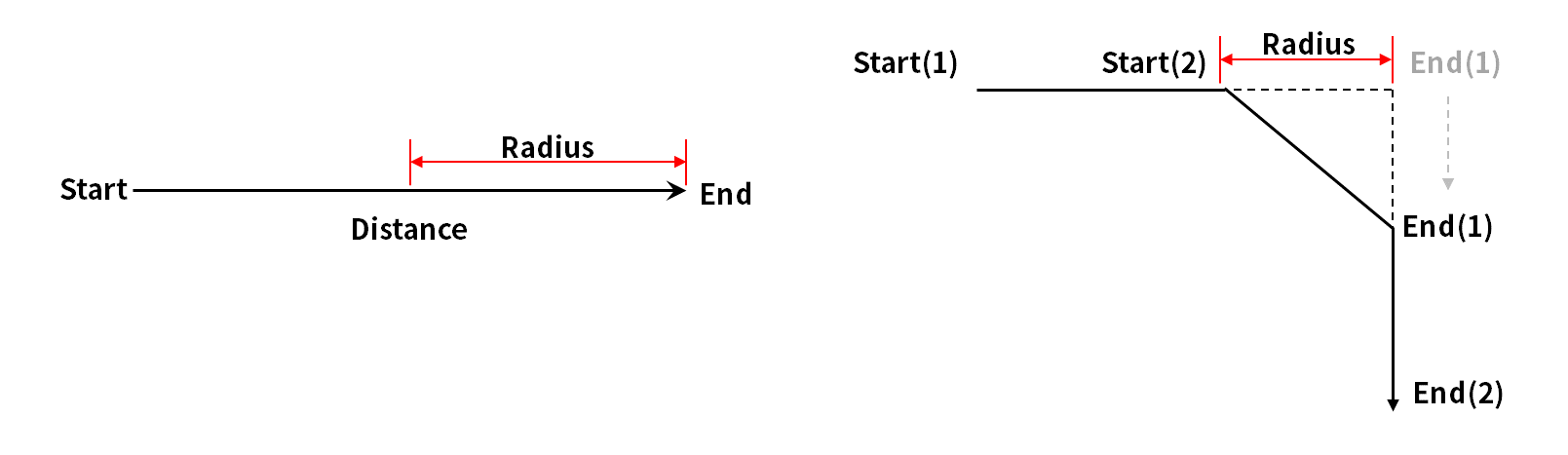
반경(Radius)
반경(Radius) 옵션은 모션 명령어의 도착점에 도달하기 전 반경(radius) 구간에서 비동기 기능이 활성화 됩니다. 이 옵션을 사용하여 모션 명령어의 경우 멈추지 않고 다음 모션 명령어로 부드럽게 이동할 수 있습니다. 반경은 기본 값으로 0mm로 설정되어 있습니다.
주의
반경 옵션은 다음의 특징 및 제한 사항을 갖고 있습니다.
- 반경 기능은 동기(Sync)에서만 사용할 수 있습니다.
- 반경 내 비동기(Async) 구간에서 조건문 및 연산 작업을 수행할 수 있습니다.
- 반경은 해당 모션을 수행하기 전인 현재 위치에서 목표 위치 사이의 총 이동 거리의 1/2을 초과할 수 없습니다.
- ex. 이동 거리가 100mm일 때 설정 가능한 최대 반경은 50mm입니다.
- 모션 간 블렌딩(Blending) 적용이 불가능한 모션 명령어는 다음과 같습니다. 이 명령어들은 이미 블렌딩이 적용되어 있기 때문에 Radius 값을 적용한 후에 이 명령어들을 사용하면 에러가 발생합니다. WaitMotion, StopMotion 등의 명령어를 적절히 사용하면 이를 회피할 수 있습니다.
- MoveSX, MoveSJ, MovePeriodic, MoveSpiral, MoveB
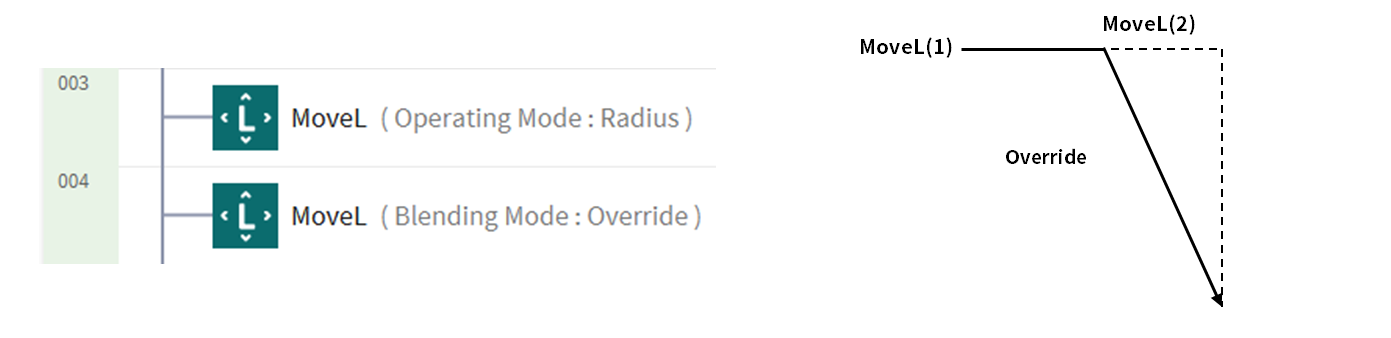
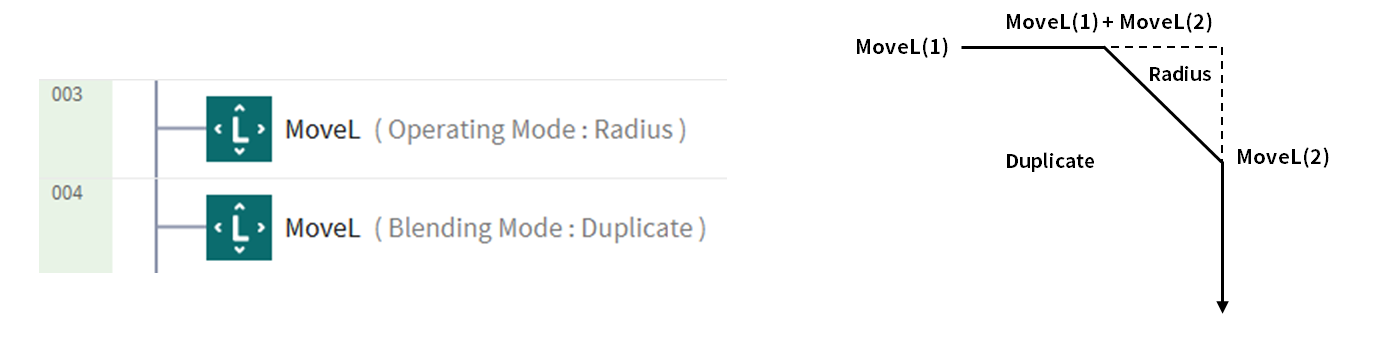
블렌딩 모드(Blending Mode)
선행 모션의 옵션에 반경(Radius)을 적용했을 때 후행 모션의 블렌딩 모드(Blending Mode)에 따라 선행 모션을 유지할지 선행 모션을 무시하고 덮어쓰는 방식으로 후행 모션을 실행할지를 결정하는 옵션입니다
중첩(Duplicate)
중첩(Duplicate)은 선행 모션을 유지하여 후행 모션이 선행 모션과 중첩되어 실행되는 모드입니다.
오버라이드 (Override)
오버라이드(Override)는 선행 모션을 무시하고 덮어쓰는 방식으로 후행 모션이 실행되는 모드입니다.