
순응 제어와 접촉 감지 기능
두산로보틱스만의 고유한 힘 제어 기술로 순응 제어(Compliance Control) 기능과 접촉 감지(Contact Sensing) 기능을 이용하면 로봇 동작 중 작업물과 주변 물체의 허용 범위 내에서는 위치 오차를 허용하기 때문에 정확한 위치를 지정하기 위한 반복 작업 없이 쉽게 교시할 수 있습니다.
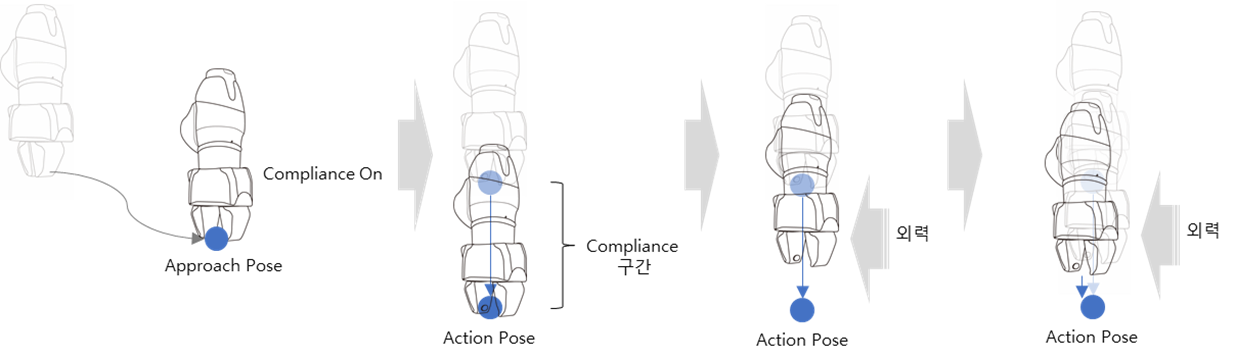
순응 제어 기능: 진입(Approach) → 작업(Action) → 후퇴(Retract) 이동할 때 외부에서 힘이 가해지면 스프링처럼 약간의 복원력을 가지면서 정해진 위치에서 벗어나는 것을 허용합니다.
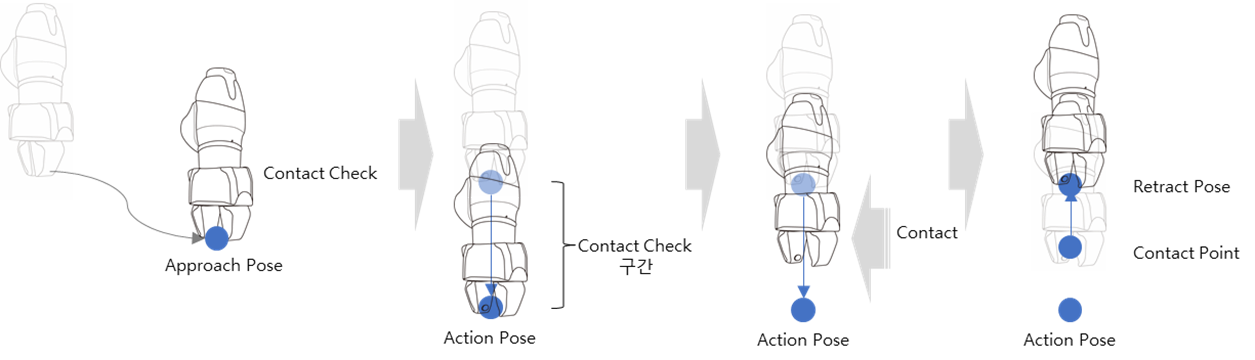
접촉 감지 기능: 사용자가 입력한 접촉 외력과 접촉 판단 범위 값을 기준으로 대상물과의 접촉을 인식하여 해당 위치에서 멈추고 그리퍼를 작동시켜 대상물을 파지합니다.
- 순응 제어 기능과 함께 사용해야 합니다. 강도(Force)에 값을 입력하고 순응 제어 기능을 켜지 않았을 경우 에러가 발생합니다.
- 접촉 감지 기능은 외부 환경과 접촉이 발생할 때 감지하는 기능이므로 충돌 감지 민감도를 둔감하게 설정하거나 충돌 감지 기능을 끈 후 사용해야 합니다.
- 접촉 감지 기능을 사용할 때 순응 제어 기능의 옵션 중에서 작업 방향 쪽 강성(예: z 방향) 값을 크게 하거나 속도를 빠르게 할 경우 외부와 접촉 시 과도한 힘이 발생할 수 있으므로 주의해야 합니다. (작업 속도가 빠를 경우에는 강성 값을 낮추고 작업 속도가 느릴 때는 강성 값을 높이는 등 작업 상황에 따라 값을 적절하게 조절해야 합니다.)
주의
- A-Series 사용 시 FTS가 장착되지 않은 경우, 접촉 감지 기능은 사용할 수 없습니다. 이 경우 순응 제어의 경우는 제한적으로 사용이 가능하고 강성 값은 Translation(X, Y, Z) 방향만 변경할 수 있습니다.