스킬 명령어의 기본 작동 패턴 이해하기
스킬 명령어는 몇 가지의 작동 패턴을 기반으로 하고 있습니다.
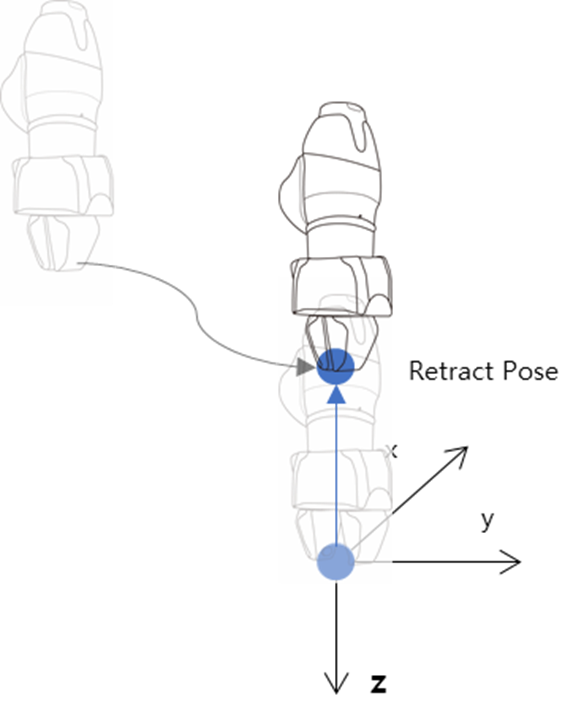
로봇은 작업을 시작하기 위해서는 현재 장착된 툴의 무게와 툴 중심 위치(TCP)에 대해 설정을 해야 하고 실제 툴이 작동하는 작업점(reference pose)으로부터 수직 방향으로 진입점(approach pose) 및 후퇴점(retract pose)을 갖는 것이 스킬 명령어의 기본 작동 패턴입니다.
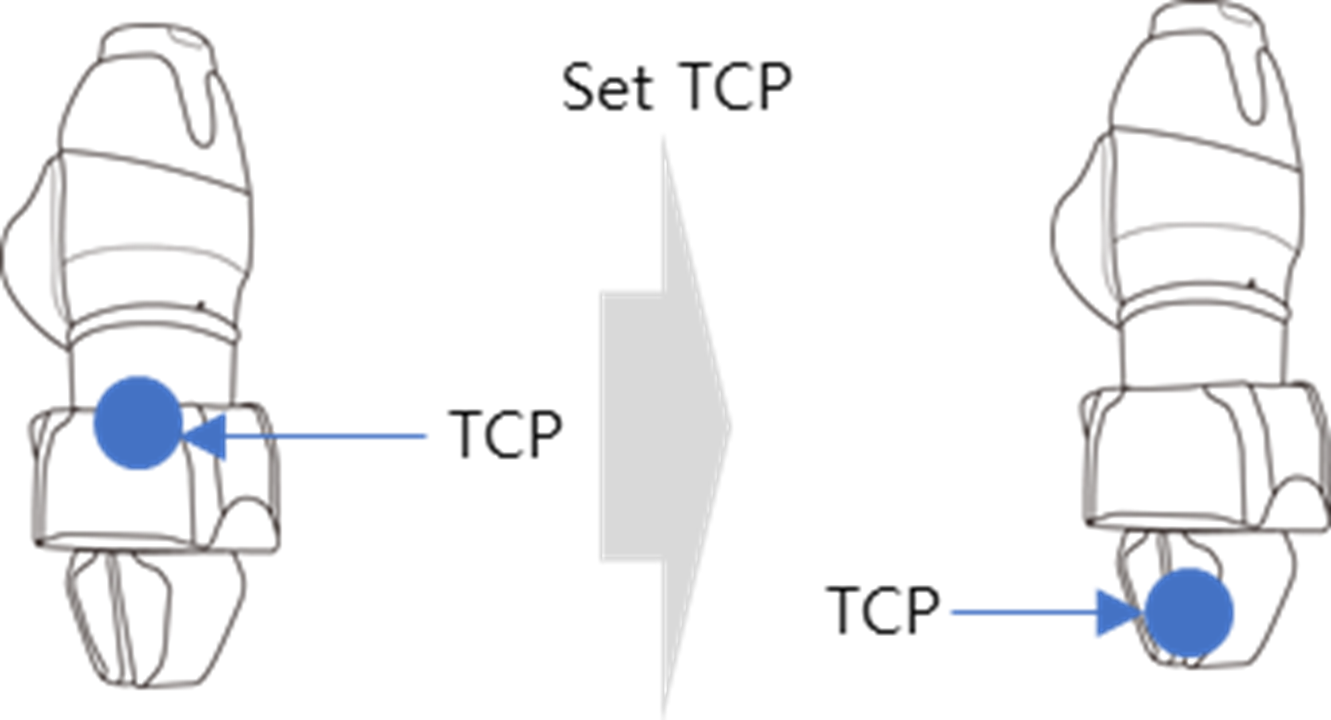
TCP 설정: 엔드이펙터(End Effector)의 스킬 명령어 사용 시 자동으로 TCP 오프셋이 변경 설정됩니다. 엔드이펙터 스킬 명령어 수행 시작 단계에 엔드이펙터의 TCP에 맞는 오프셋 설정이 포함되어 있습니다. TCP 오프셋이 변경될 경우 이전 모션 명령어와 연결하여 움직임을 부드럽게 전환하는 블렌딩 모션 기능을 사용할 수 없습니다.
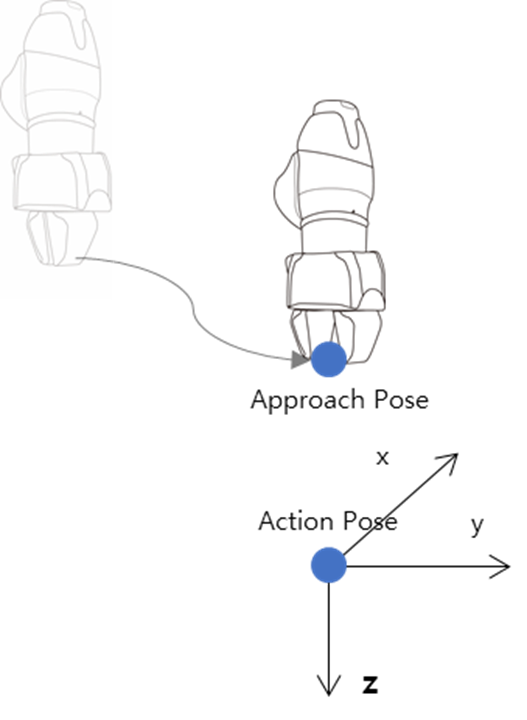
진입점(Approach Pose)으로 이동: 작업점 위치로 접근할 수 있는 위치입니다. 작업점 기준으로 툴 좌표계 Z 방향이 기본적으로 설정되어 있으며 다른 방향도 선택할 수 있습니다. 작업점에 대하여 입력된 접근 거리(approach distance)로 자동 계산되어 해당 위치로 이동합니다.
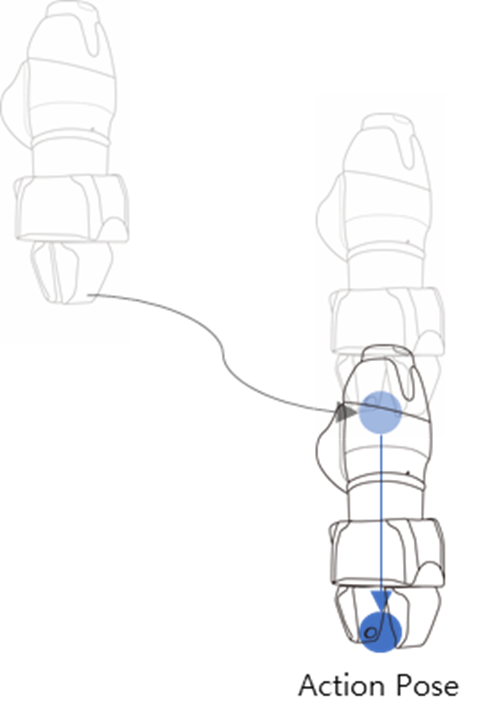
작업점(Reference Pose)으로 이동: 엔드이펙터(End Effector)의 작업 대상물에 엔드이펙터의 작업을 실행하는 위치입니다. 작업점(Reference Pose)으로 이동 시 속도, 가속도 설정 외 세부 좌표계 설정 등이 필요한 경우 작업점 우측에 있는 
후퇴점(Retract Pose)으로 이동: 대상물을 잡아서 안전하게 다른 위치로 이동하기 위한 위치입니다. 작업점 기준으로 툴 좌표계 Z 방향이며 다른 방향도 선택할 수 있습니다. 작업점에 대하여 입력된 후퇴 거리(retract distance)로 자동 계산되어 해당 위치로 이동합니다.
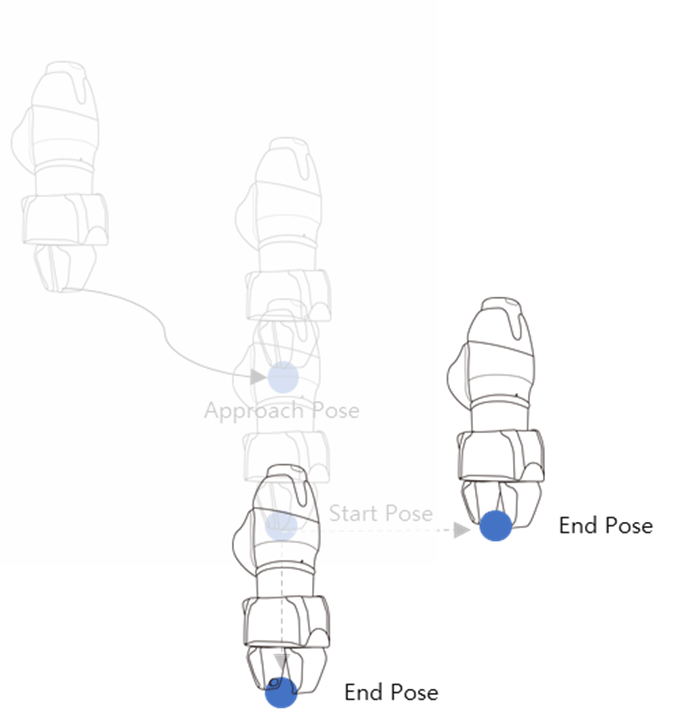
작업 시작점(Start Pose)으로 이동: 엔드이펙터의 작용 대상인 작업 대상물이 한번의 작업으로 끝이 나지 않는 경우 시작점과 경유점 종료점이 존재할 수 있으며 작업 시작점은 작업 구간에 진입하여 작업을 시작하는 위치입니다. (예: Door_OpenClose Skill - Start Pose)
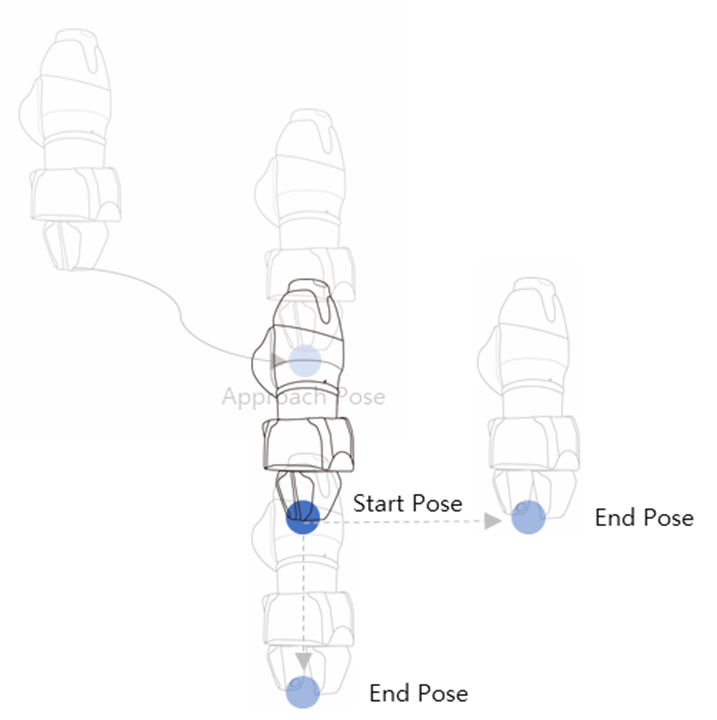
작업 종료점(End Pose)로 이동: 엔드이펙터의 작용 대상인 작업 대상물이 한번의 동작에 끝이 나지 않는 경우 시작점과 경유점 종료점이 존재할 수 있으며 작업 종료점은 작업 구간에 진입하여 작업을 종료하는 위치입니다. (예: Door_OpenClose Skill – End Pose)