
공간 제한(Space Limit) 설정
로봇의 공간 제한(Space Limit)을 설정하려면 로봇 워크셀에서 
- 워크셀 설정 화면 상단의 워크셀 이름 입력창에 등록하고자 하는 워크셀의 이름을 입력하십시오.
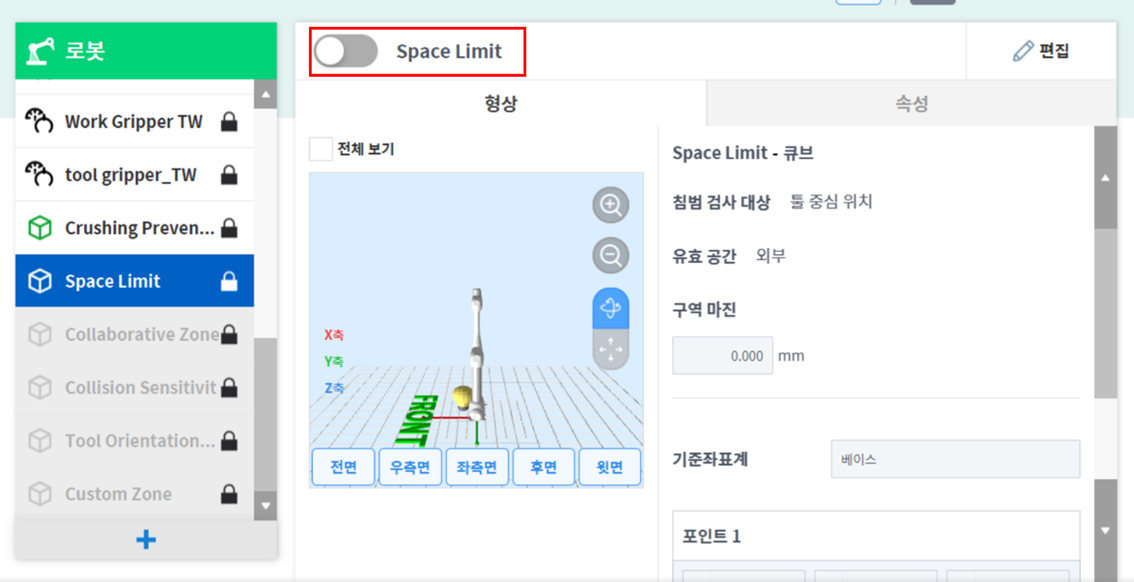
- 형상(Geometry) 탭에서 공간 제한(Space Limit)의 형태에 따른 포즈 정보와 검사 위치(Inspection Point), 유효 공간(Valid Space), 구역 마진(zone Margin)을 설정하십시오.
- 매개변수(Parameters) 탭에서 동적 구역 활성화(Dynamic Zone Enable)와 고급 옵션(Advanced Option)을 설정 후 임시 저장(Draft) 버튼을 누르십시오.
- 표시된 모든 매개변수 값이 설정하려는 값과 동일 한지 확인한 다음 임시 저장 확정(Confirm draft)을 선택하시고 확인(Confirm)을 누르십시오.
- 활성화 토글 버튼을 눌러 공간 제한을 적용하십시오.
알아두기
설정 방식에 따라 구역 마진(Zone Margin)의 기본값이 존재합니다.
- 툴 형상 설정, Body volume check 미선택 시, TCP 마진값 0mm
- 툴 형상 설정, Body volume check 선택 시, TCP 마진값 0mm
- 툴 형상 미설정, Body volume check 미선택 시, TCP 마진값 0mm
- 툴 형상 미설정, Body volume check 선택 시, TCP 마진값 60mm