
Mount(로봇 설치 자세) 설정
로봇은 모든 각도로 설치할 수 있습니다. 로봇 설치 자세를 설정하려면 로봇 워크셀에서 
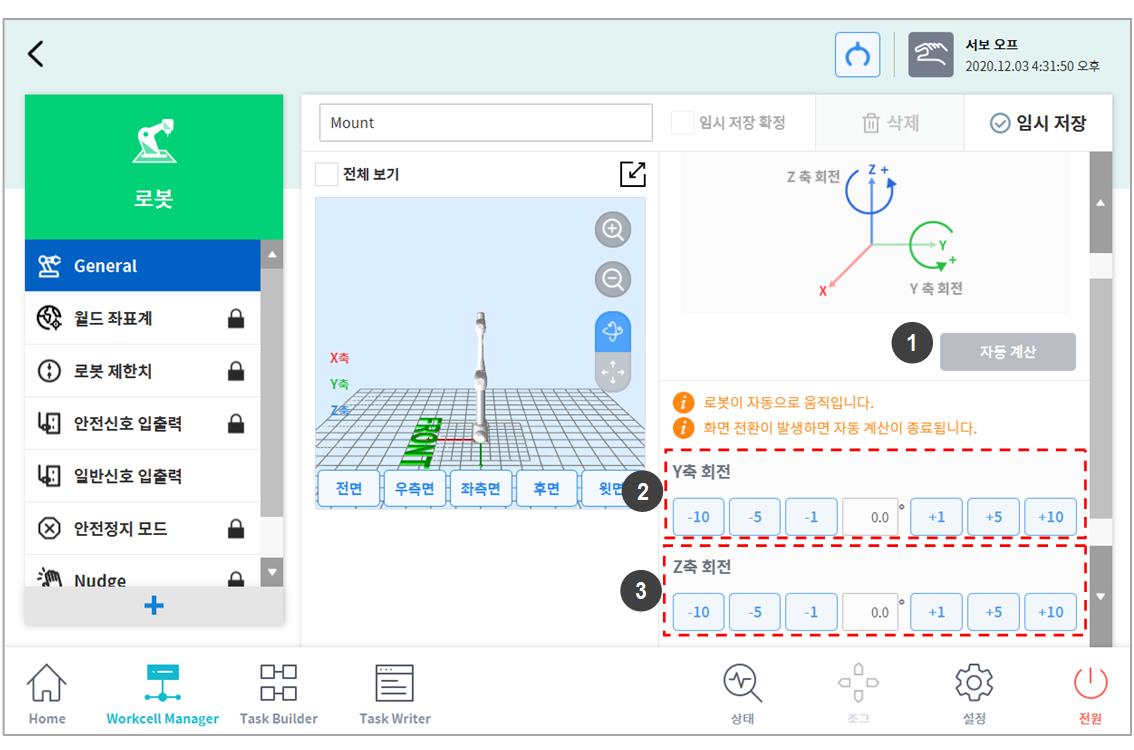
번호 | 항목 | 설명 |
|---|---|---|
1 | 자동 계산 | 로봇 설치 각도를 자동으로 계산합니다. |
2 | Y축 회전 설정 | 설치 시 로봇의 Y축 각도를 입력합니다. |
3 | Z축 회전 설정 | 설치 시 로봇의 Z축 각도를 입력합니다. |
알아두기
기울기 값을 자동으로 계산하려면 자동 계산 버튼을 탭 하십시오. 설치 자세 자동 계산 기능은 로봇의 베이스가 지면과 5도이상 기울어진 상태에서 사용할 수 있습니다. 로봇 설치 자세에 대한 자동 계산 기능을 사용하면 설치 각도에 대한 정확한 값을 입력하지 않아도 직접교시, 힘 제어, 순응 제어 기능에 필요한 설치 자세 설정을 간편하게 할 수 있지만 자동 계산을 통한 로봇 자세 설정은 정확한 측정값을 입력하는 것에 비해 로봇의 절대 위치 정확도가 떨어질 수 있습니다.
주의
H Series . .