
로봇 모션 이해하기
MENDATORY EASY 5 MIN
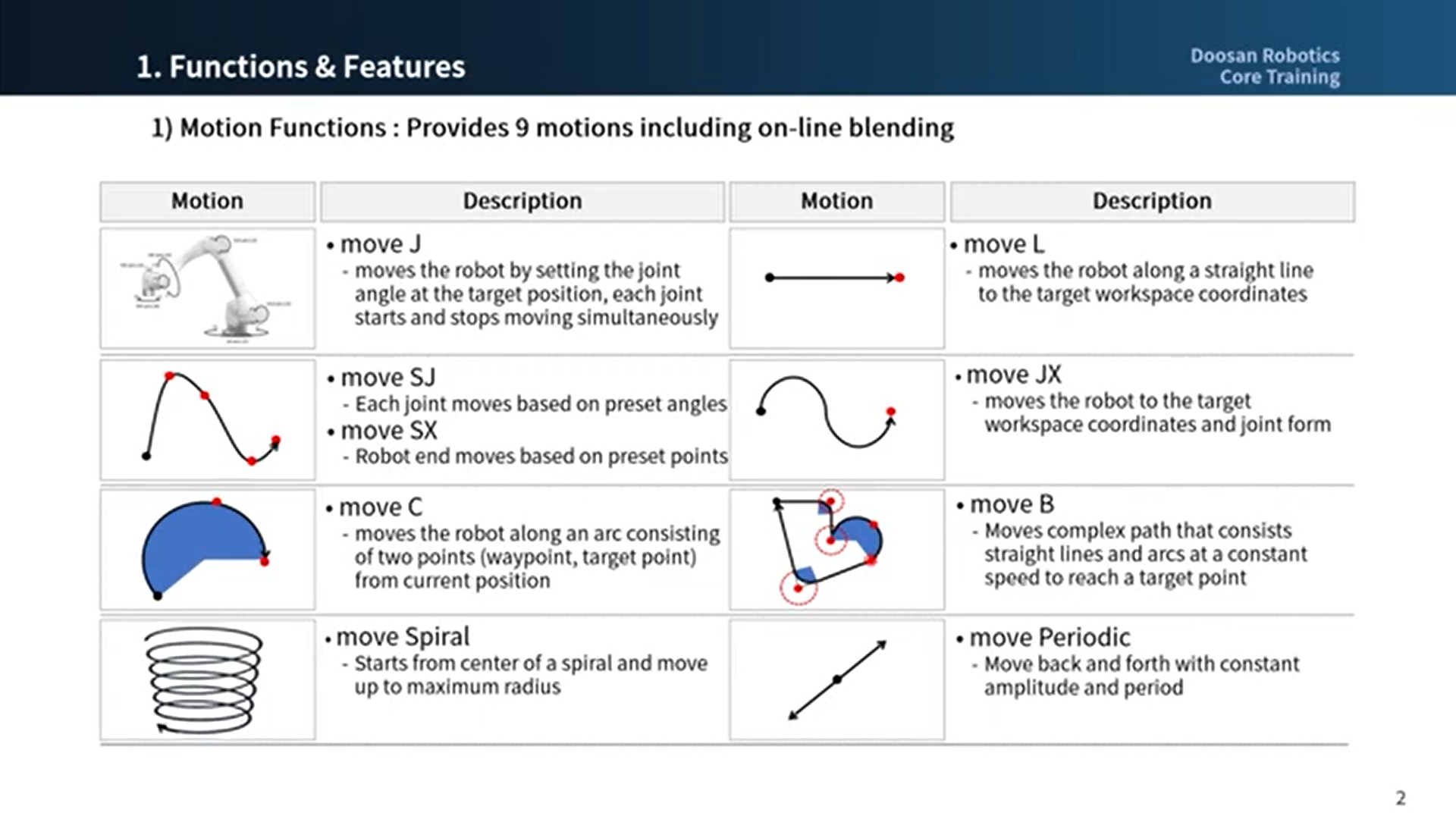
로봇 모션의 종류
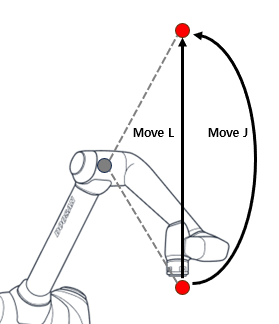
MoveJ&MoveL
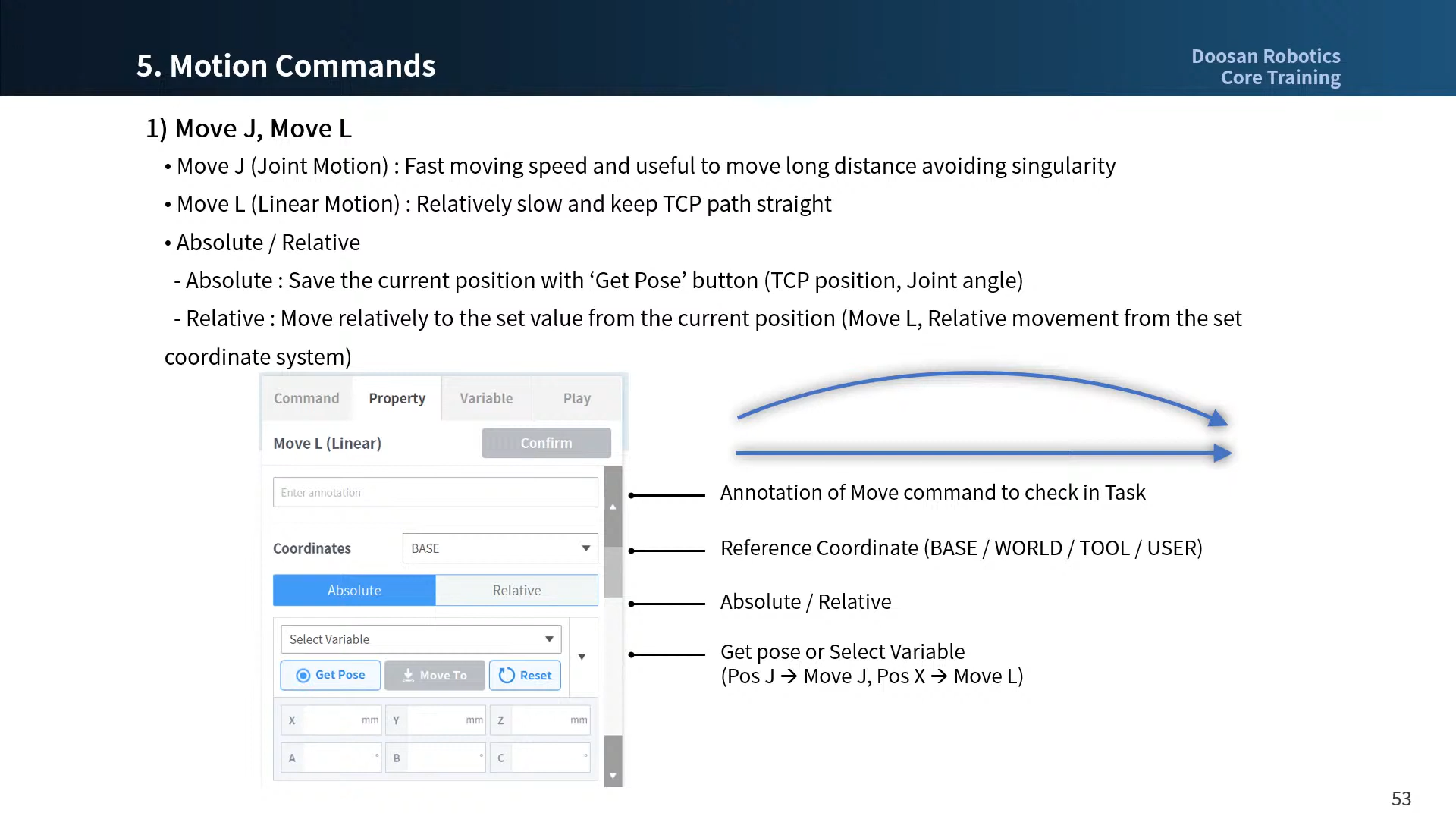
MoveJ에서 J는 관절(Joint)의 약자입니다. 이 모션은 각 관절이 목표 각도로 동시에 이동 후 동시에 정지 합니다.
MoveL에서 L은 선형(Linear)의 약자입니다. 이 모션은 로봇 끝단의 TCP가 목표 자세(위치 및 회전 각도)로 선형으로 이동합니다.
Type | MoveJ | MoveL | |
|---|---|---|---|
1 | 이동 방식 |
|
|
2 | 장점 |
|
|
3 | 단점 |
|
|
4 | 활용 |
|
|
MENDATORY EASY 5 MIN
MoveJ에서 J는 관절(Joint)의 약자입니다. 이 모션은 각 관절이 목표 각도로 동시에 이동 후 동시에 정지 합니다.
MoveL에서 L은 선형(Linear)의 약자입니다. 이 모션은 로봇 끝단의 TCP가 목표 자세(위치 및 회전 각도)로 선형으로 이동합니다.
Type | MoveJ | MoveL | |
|---|---|---|---|
1 | 이동 방식 |
|
|
2 | 장점 |
|
|
3 | 단점 |
|
|
4 | 활용 |
|
|