
로봇 제한치(Robot Limits) 설정
안전 감시 기능의 안전 제한치(safety limits)를 설정합니다.
알아두기
로봇 라인업에 따라 안전 설정값의 제한(Limit)값과 초기값이 다를 수 있습니다.
안전 제한치는 안전정격 감시기능이 정지를 시작하는 조건입니다. 정지가 완료되었을 때의 위치, 외부에 가하는 힘은 설정한 안전 제한치와 다를 수 있습니다.
TCP/로봇 제한치(TCP/Robot Limits)
TCP/로봇 제한치를 설정하려면 로봇 워크셀에서 로봇>Robot Limits>TCP/로봇을 선택하십시오. TCP/로봇 제한치 설정 화면은 다음과 같이 구성됩니다.
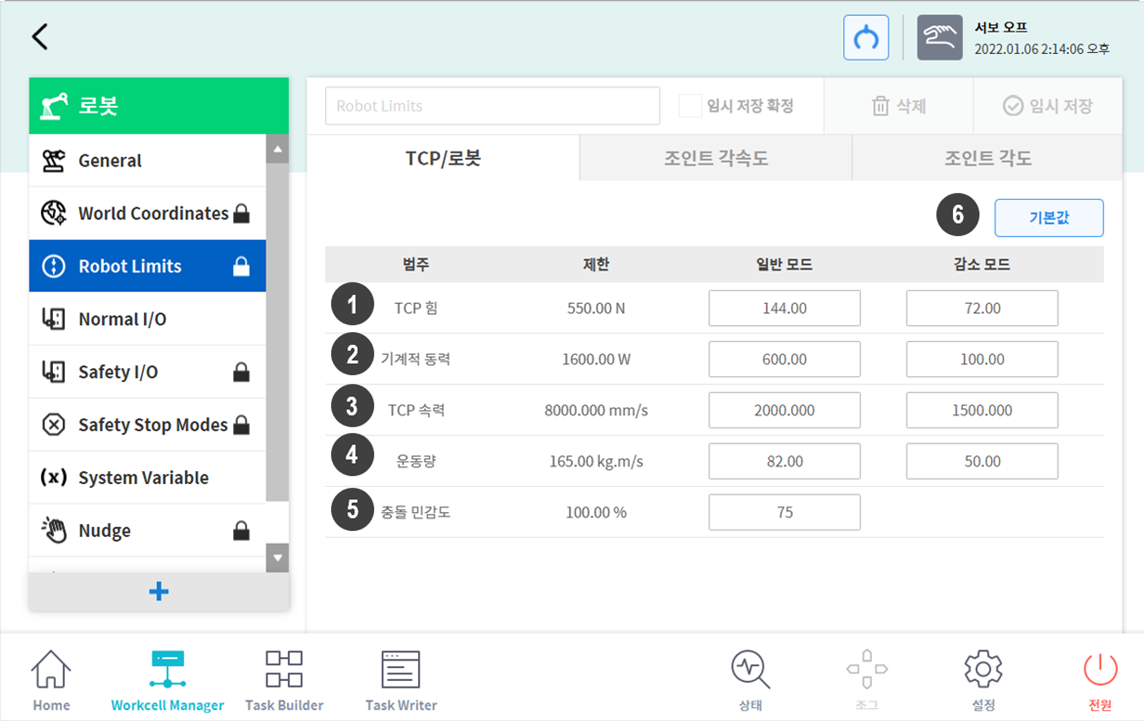
번호 | 항목 | 설명 |
|---|---|---|
1 | TCP 힘 (N) | 공구중심점(TCP)에 작용하는 힘의 크기를 제한할 수 있습니다. |
2 | 기계적 동력 (W) | 로봇의 기계적 동력의 크기를 제한할 수 있습니다. |
3 | TCP 속력 (mm/s) | 공구중심점(TCP)의 속력을 제한할 수 있습니다. |
4 | 운동량 (kg.m/s) | 로봇의 모멘텀 크기를 제한할 수 있습니다. |
5 | 충돌 민감도 (%) | 충돌 감지 민감도를 설정할 수 있습니다. |
6 | 기본값 | 툴 중심점/로봇 제한치 설정을 기본값으로 변경합니다. |
조인트 각속도 제한치(Joint Speed Limits)
조인트 각속도 제한치를 설정하려면 로봇 워크셀에서 로봇>Robot Limits>조인트 각속도를 선택하십시오. 조인트 각속도 제한치 설정 화면은 다음과 같이 구성됩니다.
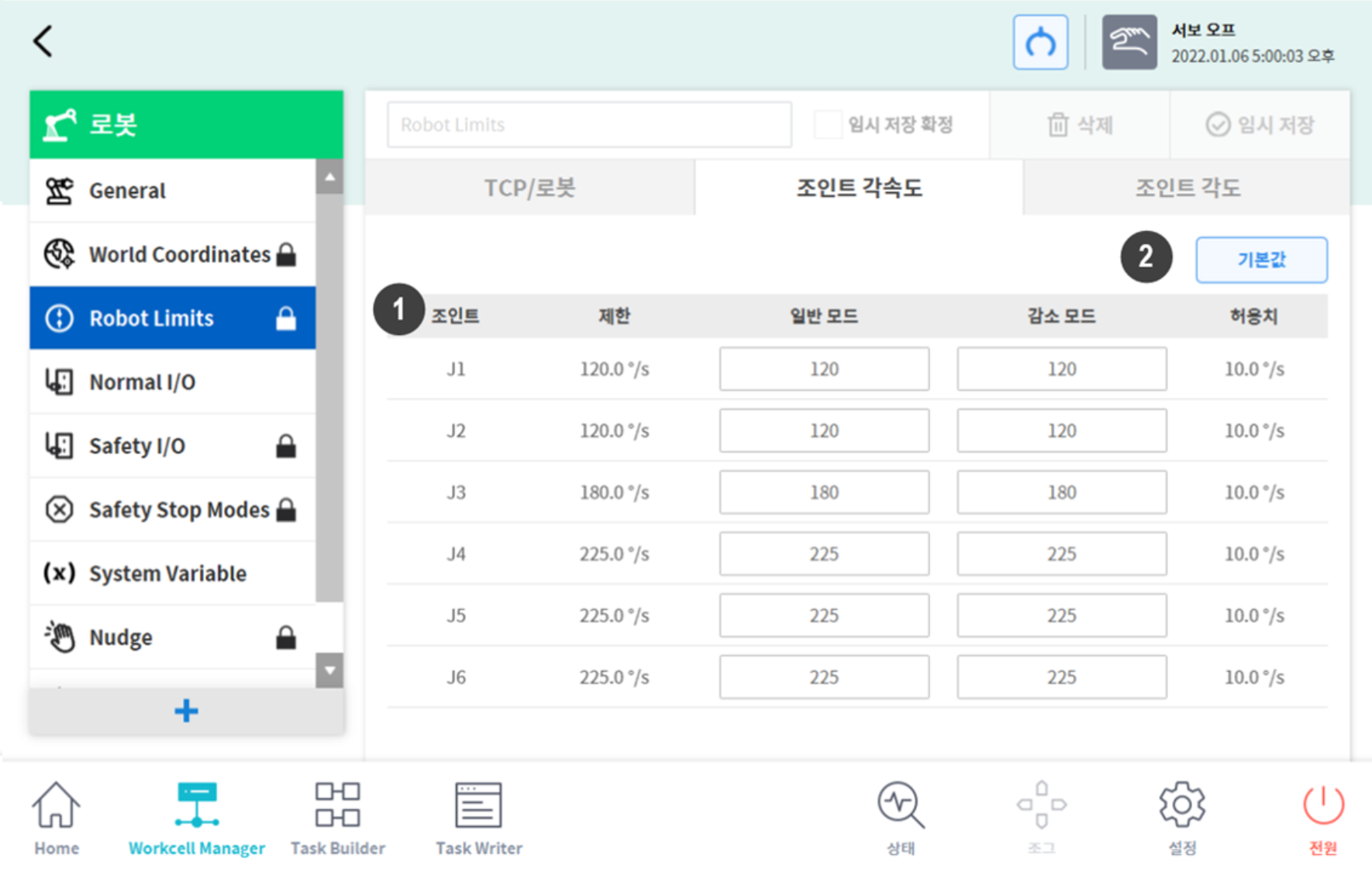
번호 | 항목 | 설명 |
|---|---|---|
1 | 관절의 각속도 | 각 관절의 각속도를 제한할 수 있습니다. |
2 | 기본값 | 조인트 각속도 제한치 설정을 기본값으로 변경합니다. |
조인트 각도 제한치(Joint Angle Limits)
조인트 각도 제한치를 설정하려면 로봇 워크셀에서 로봇>Robot Limits>조인트 각도를 선택하십시오. 조인트 각도 제한치 설정 화면은 다음과 같이 구성됩니다.
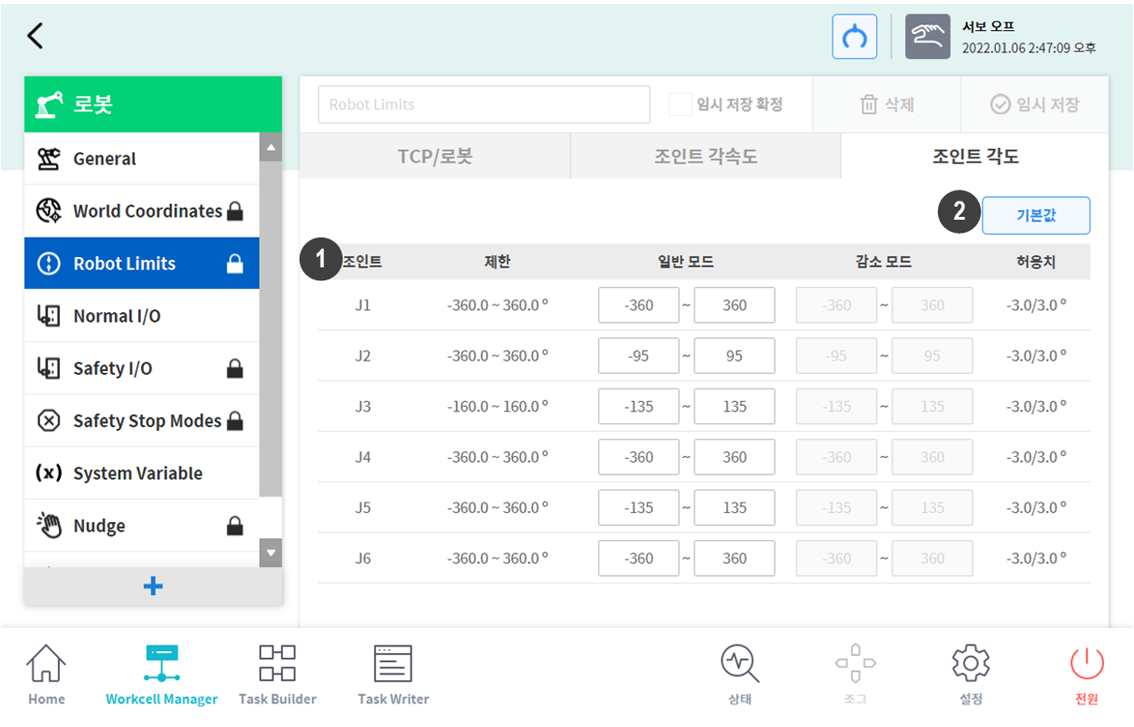
번호 | 항목 | 설명 |
|---|---|---|
1 | 각 관절의 각도 범위 | 각 관절의 각도범위를 제한할 수 있습니다. |
2 | 기본값 | 조인트 각도 제한치 설정을 기본값으로 변경합니다. |