
순응 제어와 접촉 감지 기능
두산로보틱스만의 고유한 힘 제어 기술로 순응 제어(Compliance Control) 기능과 접촉 감지(Contact Sensing) 기능을 이용하면 로봇 동작 중 작업물과 주변 물체의 허용 범위 내에서는 위치 오차를 허용하기 때문에 정확한 위치를 지정하기 위한 반복 작업 없이 쉽게 교시할 수 있습니다.
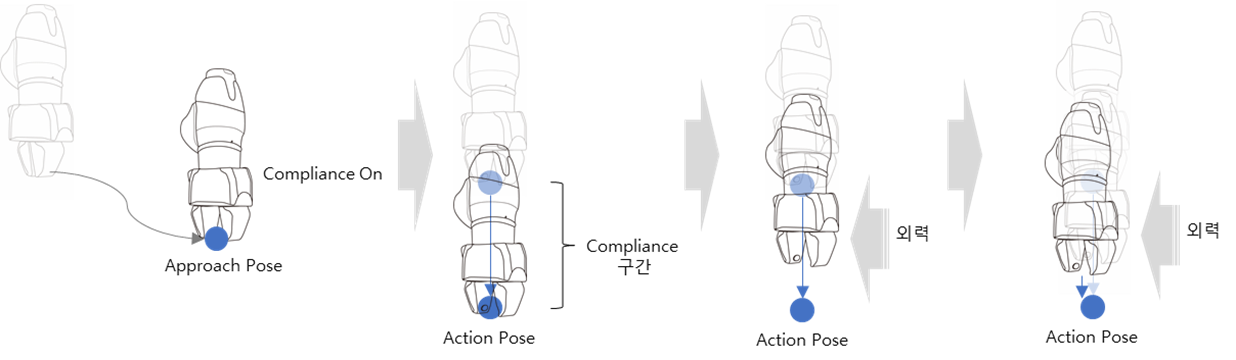
순응 제어 기능: 진입(Approach) → 작업(Action) → 후퇴(Retract) 이동할 때 외부에서 힘이 가해지면 스프링처럼 약간의 복원력을 가지면서 정해진 위치에서 벗어나는 것을 허용합니다.
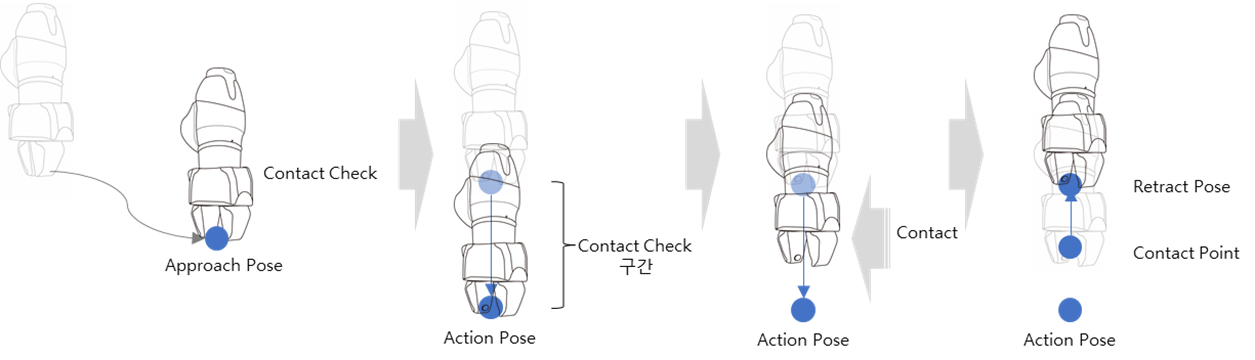
접촉 감지 기능: 사용자가 입력한 접촉 외력과 접촉 판단 범위 값을 기준으로 대상물과의 접촉을 인식하여 해당 위치에서 멈추고 그리퍼를 작동시켜 대상물을 파지합니다.
순응 제어 기능과 함께 사용해야 합니다. 강도(Force)에 값을 입력하고 순응 제어 기능을 켜지 않았을 경우 에러가 발생합니다.
접촉 감지 기능은 외부 환경과 접촉이 발생할 때 감지하는 기능이므로 충돌 감지 민감도를 둔감하게 설정하거나 충돌 감지 기능을 끈 후 사용해야 합니다.
접촉 감지 기능을 사용할 때 순응 제어 기능의 옵션 중에서 작업 방향 쪽 강성(예: z 방향) 값을 크게 하거나 속도를 빠르게 할 경우 외부와 접촉 시 과도한 힘이 발생할 수 있으므로 주의해야 합니다. (작업 속도가 빠를 경우에는 강성 값을 낮추고 작업 속도가 느릴 때는 강성 값을 높이는 등 작업 상황에 따라 값을 적절하게 조절해야 합니다.)
주의
A-Series 사용 시 FTS가 장착되지 않은 경우, 접촉 감지 기능은 사용할 수 없습니다. 이 경우 순응 제어의 경우는 제한적으로 사용이 가능하고 강성 값은 Translation(X, Y, Z) 방향만 변경할 수 있습니다.