
시스템 복원
로봇 시스템을 사용자가 선택한 특정 버전으로 복원시킵니다.
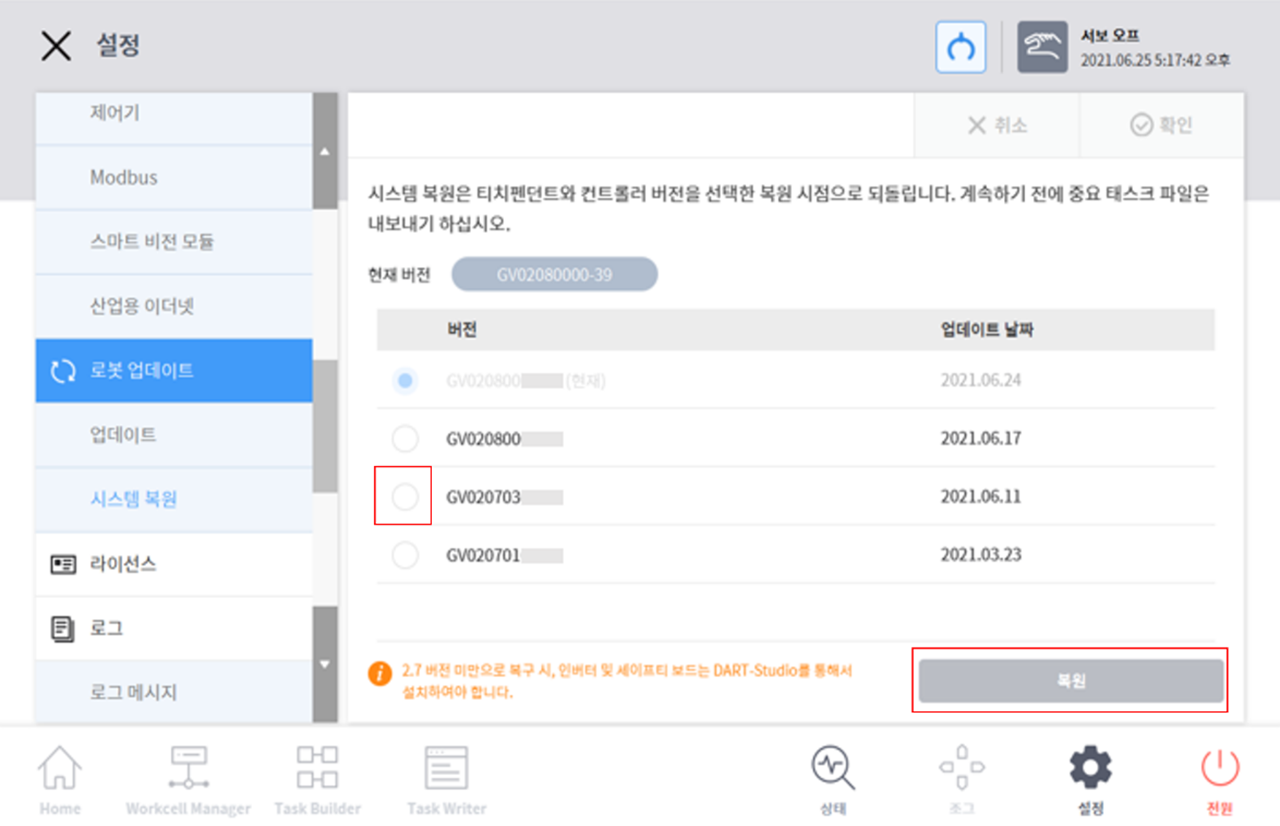
설정 메뉴 영역에서 로봇 업데이트>시스템 복원 메뉴를 선택하십시오.
로봇 시스템에 설치되었던 최근 5개 버전까지 화면에 나타납니다.
현재 버전의 라디오 버튼이 선택된 상태로 표시됩니다.
복원하고자 하는 버전의 라디오 버튼을 선택하십시오.
복원 버튼이 활성화됩니다.
복원 버튼을 누르십시오.
복원이 완료되면 시스템을 다시 시작해 주십시오.
알아두기
Windows 로 접속한 경우에는 시스템 복원 기능이 제공되지 않습니다.
Version : A Series
A 시리즈에서 시스템 복원 이후 다음과 같은 문제가 발생하는 경우에는 마찰 캘리브레이션(Friction Calibration) 을 참고하여, 마찰 캘리브레이션을 수행해야 합니다.
직접 교시의 조작이 어려워지는 문제 발생하는 경우
Tool의 무게 및 무게중심을 정확하게 설정하였음에도 직접교시가 정상적으로 동작하지 않는 경우
직접교시를 시도했을 때 로봇이 빠르게 흐르거나 도와주는 힘이 과도한 경우
직접교시를 시도했을 때 한쪽 방향으로 조작이 어려운 경우
Default 충돌 민감도 설정 상태에서 충돌감지가 빈번하게 발생하는 경우
간헐적으로 티치 펜던트에서 '2.9015' 에러가 발생하는 경우
9015 에러: 로봇끝단의 외력이 안전범위를 초과하였습니다.