
콕피트 버튼 사용하기(5버튼)
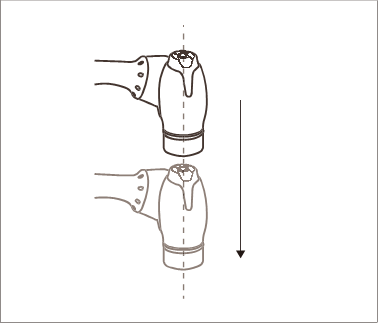
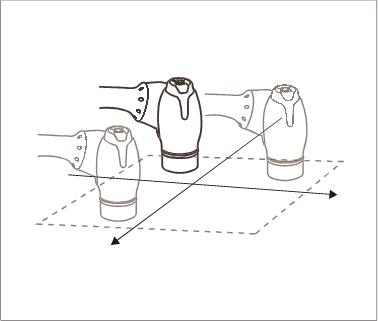
콕피트의 핸드가이딩 버튼이나 사용자 설정 버튼을 누른 상태로 로봇의 자세를 사용자가 직접 변경할 수 있습니다.
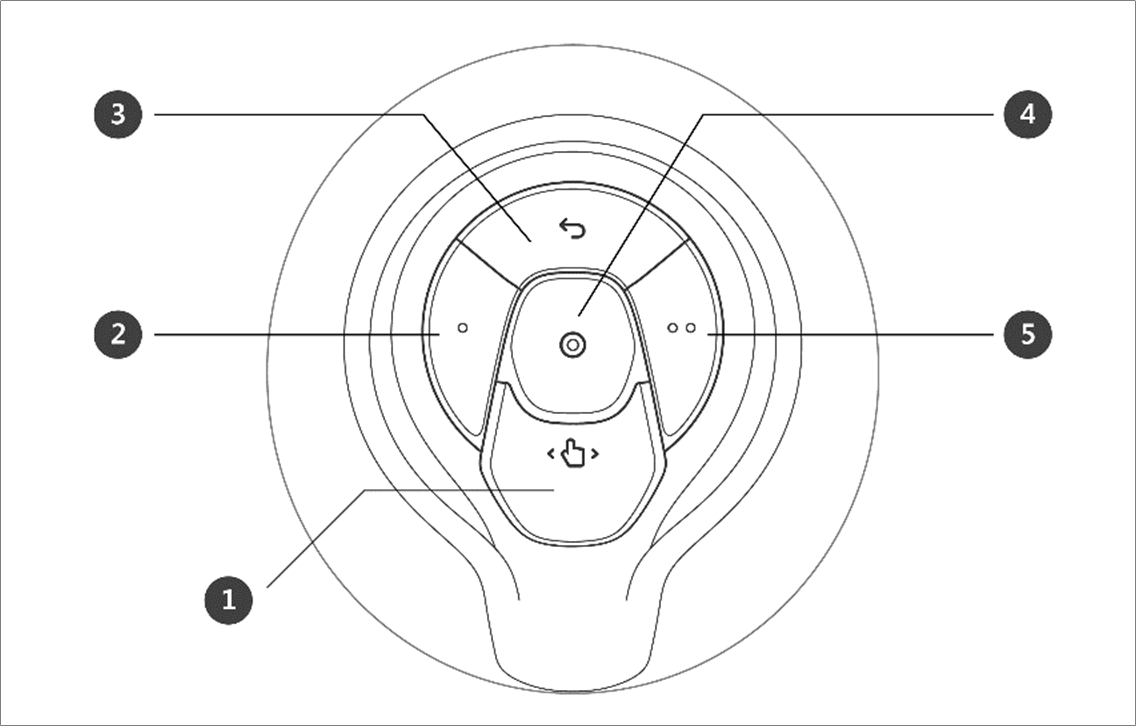
번호 | 항목 | 설명 |
|---|---|---|
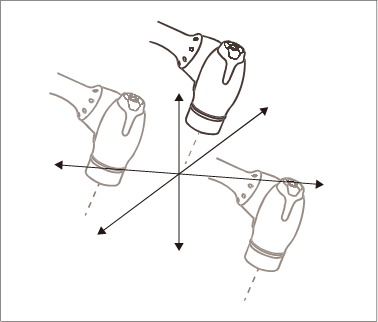
1 | 핸드가이딩 버튼 | 로봇의 자세를 모든 방향으로 자유롭게 변경할 수 있습니다. |
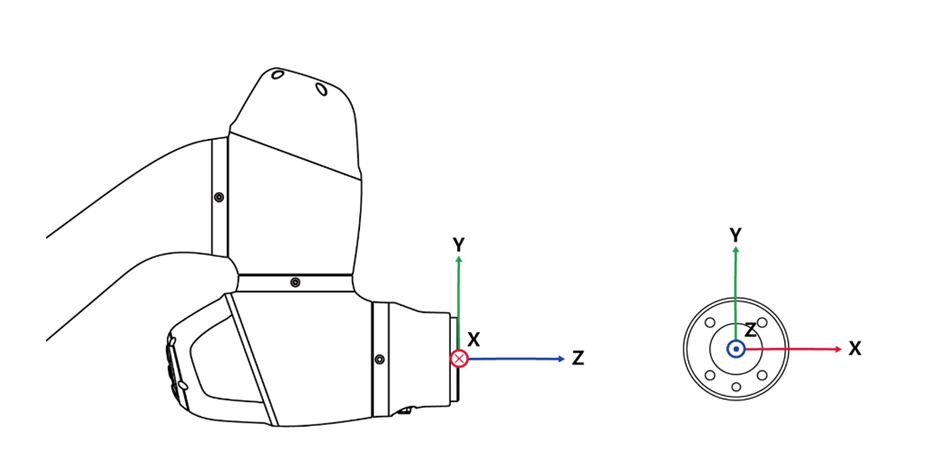
2, 5 | 사용자 설정 버튼 (구속 모션) | 로봇의 자세를 할당된 모드에 해당하는 고정 조건에 의해 자세를 직접 입력하여 변경할 수 있습니다.
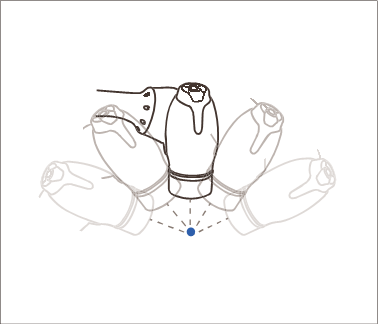
 설정 방법에 대한 자세한 내용은 콕피트 설정하기를 참고하십시오. |
3 | 취소 버튼 | 가장 최근 저장된 포즈를 삭제합니다. |
4 | 포즈 저장 버튼 | 현재 로봇 포즈를 저장합니다. 자세한 내용은 콕피트 버튼을 이용한 스킬 명령어의 작업점 설정하기를 참조하십시오. |
주의
A series 모델 중 FTS가 없는 A0509, A0912, A0509F, A0912F의 경우, 사용자설정 버튼(구속 모션)을 사용할 수 없습니다.
A series 모델 중 FTS가 있는 A0509S, A0912S의 경우, 사용자설정 버튼(구속 모션)을 사용할 수 있습니다.
구속 모션의 경우, 로봇 끝단에 장착된 FTS를 이용하여 동작하기 때문에 반드시 툴을 부착한 후 툴을 잡고 움직여야 합니다. 로봇의 몸체를 잡고 움직이는 경우, 로봇이 반응하지 않을 수 있습니다.
로봇 시리즈 별 기능 제한에 관한 자세한 내용은 로봇 시리즈 별 기능 제한을 확인하십시오.