
각 부 명칭과 기능
매니퓰레이터
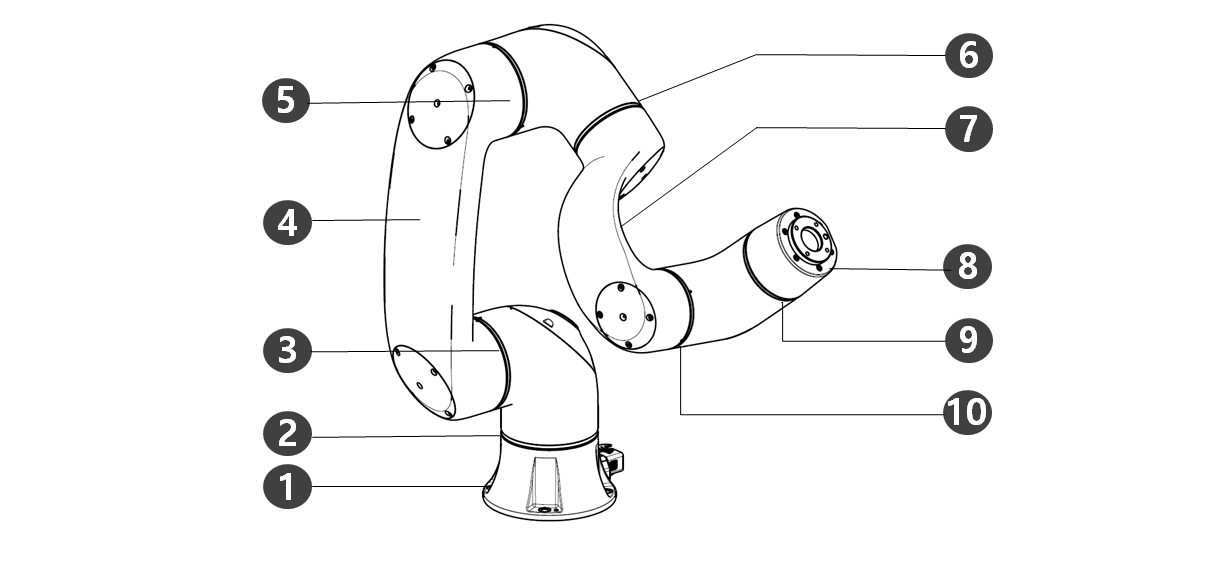
각부의 명칭
No. | 이름 | No. | 이름 |
|---|---|---|---|
1 | 베이스 (Base) | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | 툴 플랜지(Tool Flange) |
4 | Link1 | 9 | J5 |
5 | J3 | 10 | J6 |
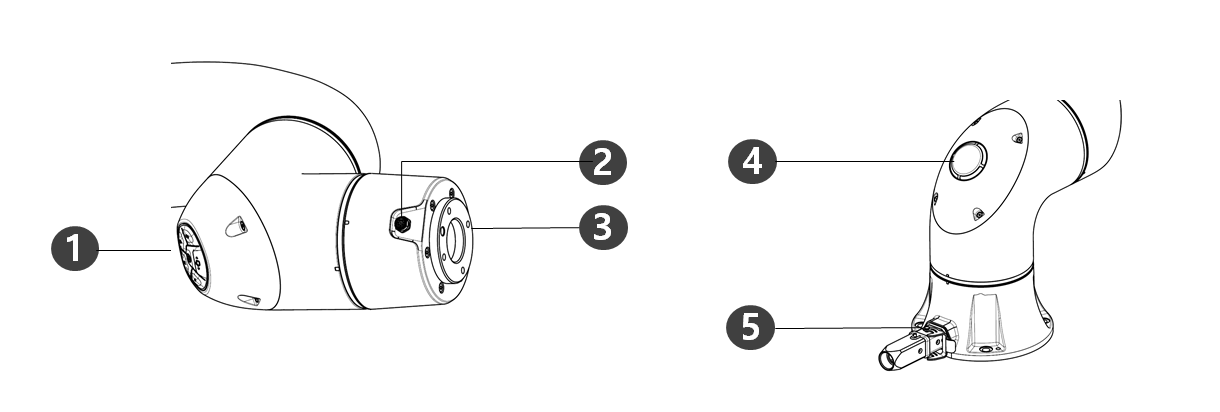
주요 기능
No. | 항목 | 설명 |
|---|---|---|
1 | 콕핏(Cockpit) | [옵션] 직접 교시를 위한 콘트롤러입니다. |
2 | 플랜지 I/O | 툴 제어를 위한 입출력 포트입니다. |
3 | 툴 플랜지 | 툴을 장착하는 부위입니다. |
4 | LED | 로봇의 상태를 색상으로 표시합니다. 로봇 상태에 대한 자세한 내용은 “ (2.12-ko_KR) 모드별 상태와 플랜지 LED 색상”을 참조하십시오. |
5 | 커넥터 | 로봇의 전원 인가 및 통신에 사용됩니다. |
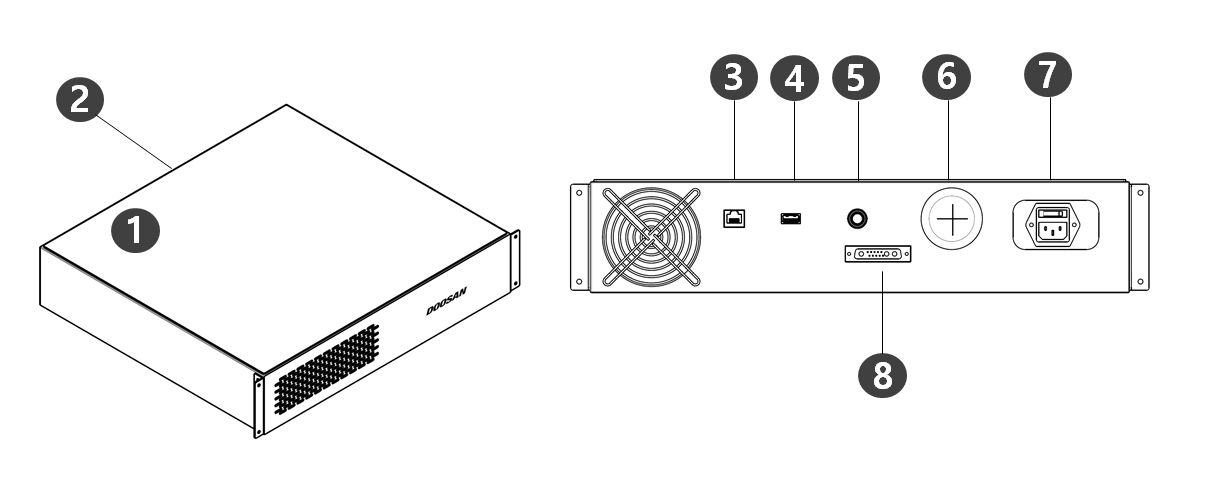
컨트롤러
No. | 항목 | 설명 |
|---|---|---|
1 | I/O 연결 단자 (내부) | 다른 로봇의 컨트롤러나 주변 기기와 연결할 수 있습니다. |
2 | 비상정지 버튼 및 스마트 펜던트 연결 단자 | 비상 정지 버튼 또는 스마트 펜던트의 케이블을 컨트롤러와 연결합니다. |
3 | 네트워크 연결 단자 | 컨트롤러 내 네트워크 연결단자에 연결하여 랩탑, TCP/IP장비, Modbus 장비 등을 사용할 수 있습니다. |
4 | USB 연결 단자 | 로봇 동작 중 발생하는 로그를 USB 저장매체에 저장하거나 태스크 내보내기, 가져오기를 할 수 있습니다. |
5 | 펜던트, E-STOP 버튼 단자 | 스마트 펜던트를 연결하거나, E-STOP 버튼을 연결할 수 있습니다. |
6 | 외부 케이블 단자 | 외부에 입력할 수 있는 장치들을 연결할 수 있는 단자입니다. |
7 | 전원 연결 단자/스위치 | 컨트롤러의 주 전원을 연결하여 켜거나 끌 수 있습니다. 자세한 내용은 (2.12-ko_KR) 시스템 전원 켜기/끄기 를 참고하십시오. |
8 | 매니퓰레이터 케이블 연결 단자 | 매니퓰레이터의 케이블을 컨트롤러와 연결합니다. |
비상 정지 버튼
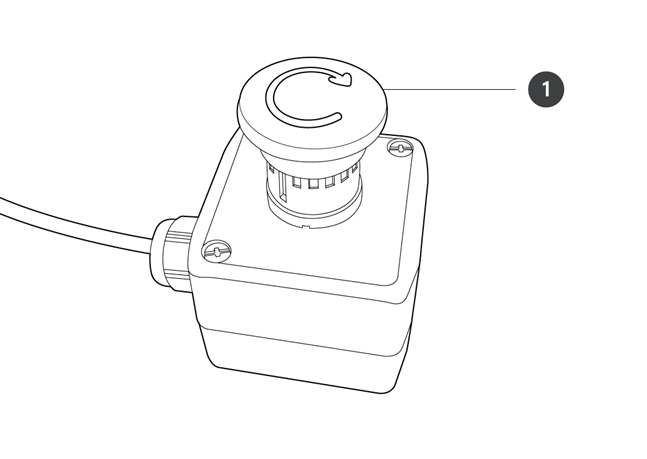
No. | 항목 | 설명 |
|---|---|---|
1 | 비상 정지 버튼 | 긴급한 상황이 발생한 경우 버튼을 눌러 로봇의 작동을 멈출 수 있습니다. |
스마트 펜던트
스마트 펜던트는 기본 구성품이 아닌 옵션 제품으로 별도 구매가 필요합니다. 제품에 관한 자세한 기능은 (2.12-ko_KR) 부록. 스마트 펜던트(A Series)를 참고하십시오.
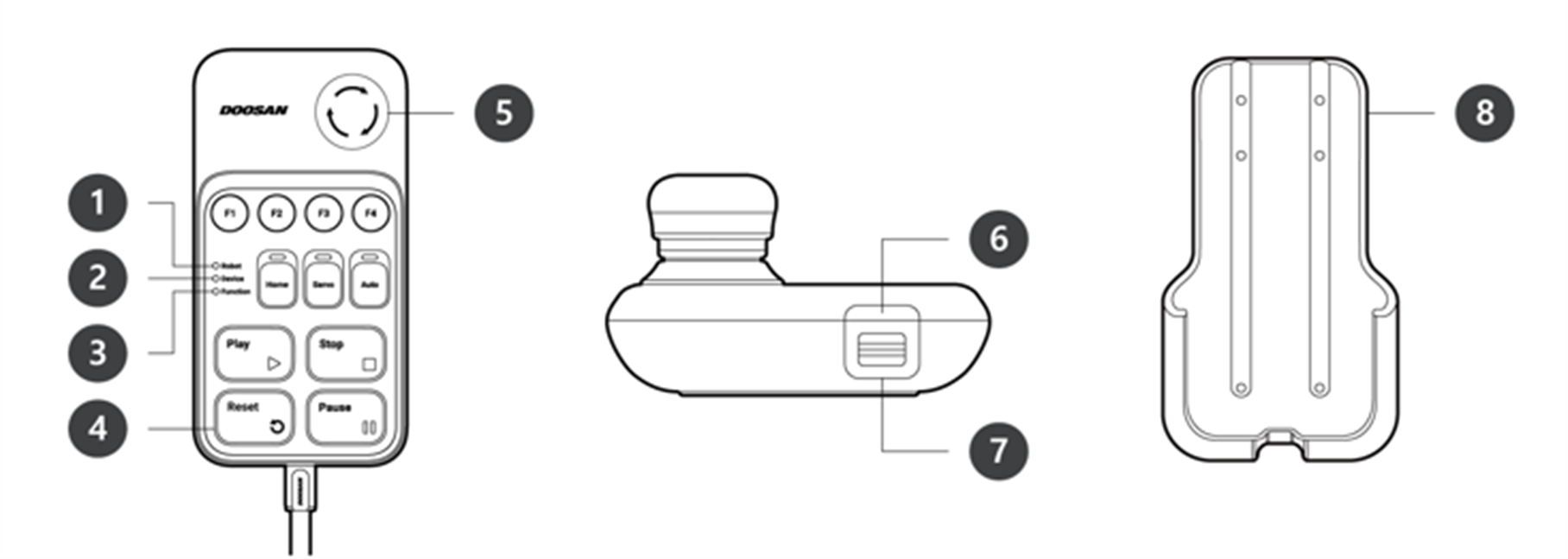
No. | 항목 | 설명 |
|---|---|---|
1 | Robot LED | 로봇의 상태 LED와 같은 색을 사용자에게 보여주어 로봇의 상태를 알려줍니다. |
2 | Device LED | 스마트 펜던트 모드에 진입 여부를 알려줍니다. |
3 | Function LED | 4개의 Input signal button(F1~F4)가 눌리면 LED가 점등되어 눌림 상태를 알려줍니다. |
4 | 버튼부 | 기능별로 4개의 Input signal button(F1~F4), Home, Servo, Auto, Play, Stop, Reset, Pause 총 11개의 버튼이 있습니다. |
5 | 비상 정지 버튼 | 긴급한 상황이 발생한 경우 버튼을 눌러 로봇의 작동을 멈출 수 있습니다. |
6 | 전원 버튼 | 스마트 펜던트의 주 전원을 켜거나 끌 수 있습니다. |
7 | 스트랩 고정부 | 줄 등을 고정시켜 사용 가능합니다. |
8 | 거치 브라켓 | 거치 브라켓을 벽에 고정시켜 스마트 펜던트를 보관할 수 있습니다. |
알아두기
SW V2.8 이상의 버전을 사용하는 고객의 경우, 스마트 펜던트의 Resume 버튼에 Reset 라벨을 부착하여 사용하시기 바랍니다.
SW V2.8 보다 낮은 버전을 사용하는 고객의 경우, 스마트 펜던트에서 Reset 기능이 아닌 Resume 기능으로 동작하므로 Reset 라벨의 부착을 필요로 하지 않습니다.
사용 중 라벨이 탈락될 수 있으니 사용에 주의하시기 바랍니다.