
작업자 개입(Operator Intervention) 기능
로봇이 구동 중, 문제가 발생할 경우와 유저가 명령을 내릴 경우 로봇 동작을 중지 시키고 작업자가 개입해 상황을 해결할 수 있는 팝업을 표시하고, 사용자가 문제를 해결한 후 문제 발생 Program line에서 task를 이어서 진행하는 기능을 제공합니다.
알아두기
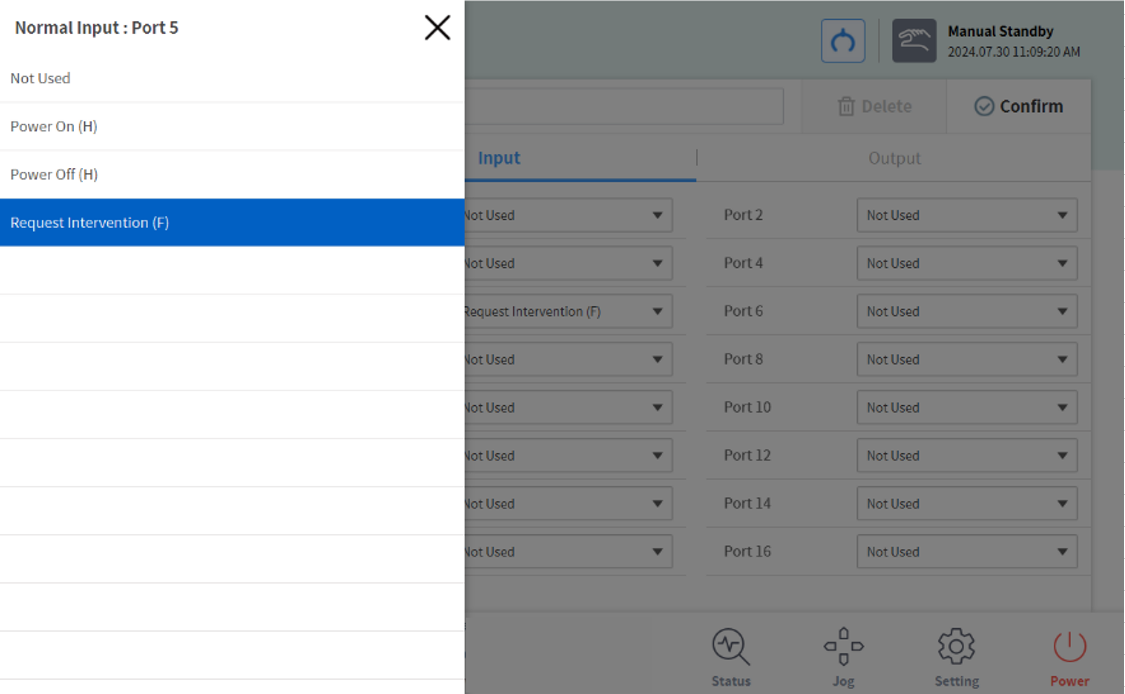
작업자 개입 기능을 사용하기 위해서는 아래 설정 중 하나를 완료 하여야 한다.
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(상세 설정은 Welding Techinical Note 참고)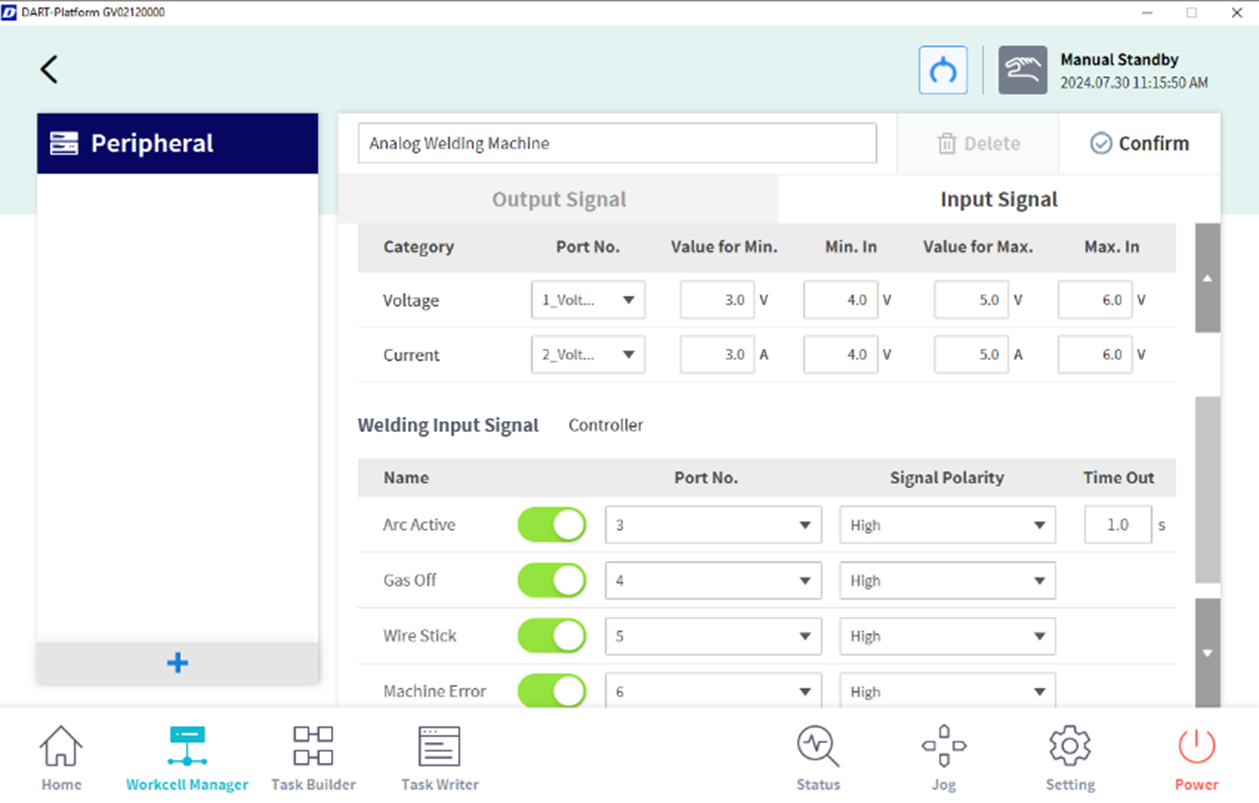
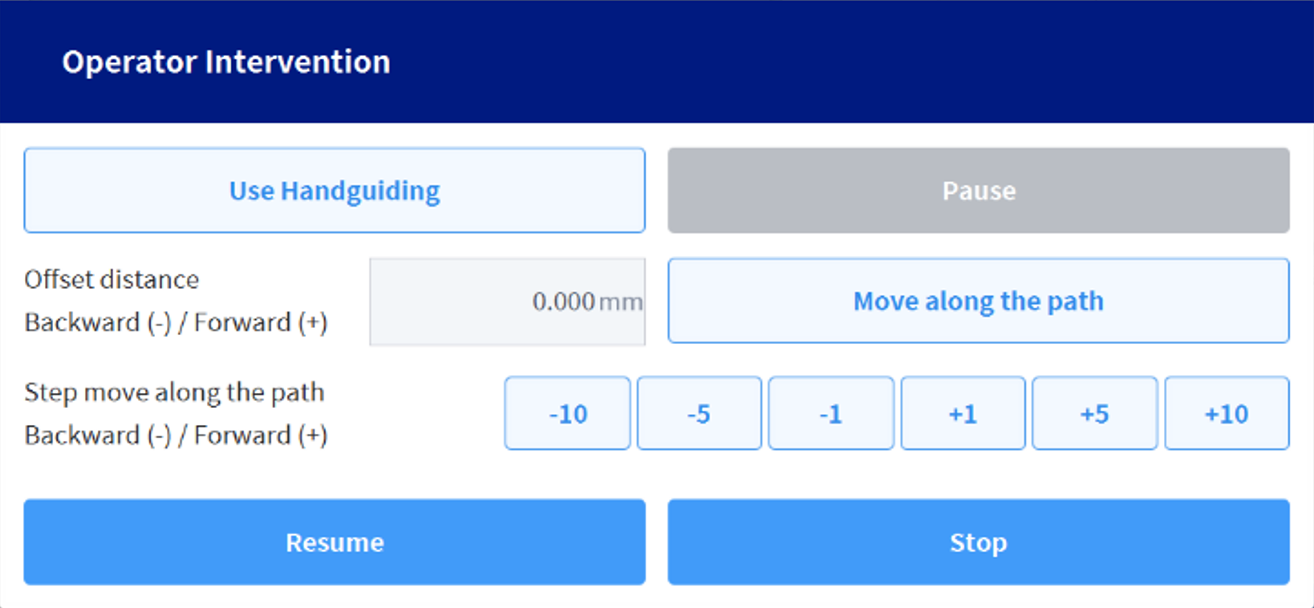
“Move along the path 버튼”과 “Step Move 버튼(-10,-5,-1,+1,+5,+10)”은 동일한 동작을 수행합니다. 단 전자는 수동으로 입력한 Offset만큼 기준 위치에서 전후를 목표로 움직이는 반면, 후자는 사전 설정된 Step Offset만큼 전후 점을 목표로 합니다. 위 버튼들을 이용해 동작을 완료한 후, 추가적으로 버튼을 누르는 경우 현재 위치를 기준으로 Offset 만큼 움직이게 됩니다.
“Use Handguiding 버튼”은 Collaborative Zone이 설정된 경우에만 활성화되며, 로봇 상태가 Zone 내부에서 직접 교시를 사용할 수 있는 Handguiding 상태로 바뀝니다. 이후 cockpit 또는 Teaching pendant 뒷면 버튼을 눌러 직접 교시를 동작 시킬 수 있습니다.
Handguiding 상태에서는 “Use Handguiding 버튼”은 “End Handguiding 버튼”으로 바뀌게 됩니다.
“End Handguiding 버튼”을 누를 시 Handguiding 상태가 종료됩니다. 이 때 안전 상의 이유로 현재 로봇 위치, 각도와 정지 시점(최초 팝업 발생 시점)의 값을 비교하여 팝업을 발생 시키게 됩니다. 아래 내용이 표기된 팝업이 발생한 경우 다시 직접 교시 하여 로봇의 위치, 자세를 수정한 후 다시 시도해야 합니다.
현재 TCP 위치와 정지 위치의 TCP의 직선 거리가 20cm 이상 차이 나는 경우
현재 Joint Angle과 정지 시점의 Joint Angle 차이가 1~3축 (10도) / 4~5축 (30도) / 6축 (60도) 이상 틀어진 경우
본 기능은 MoveL / MoveC / MoveB 동작 중에만 지원합니다.
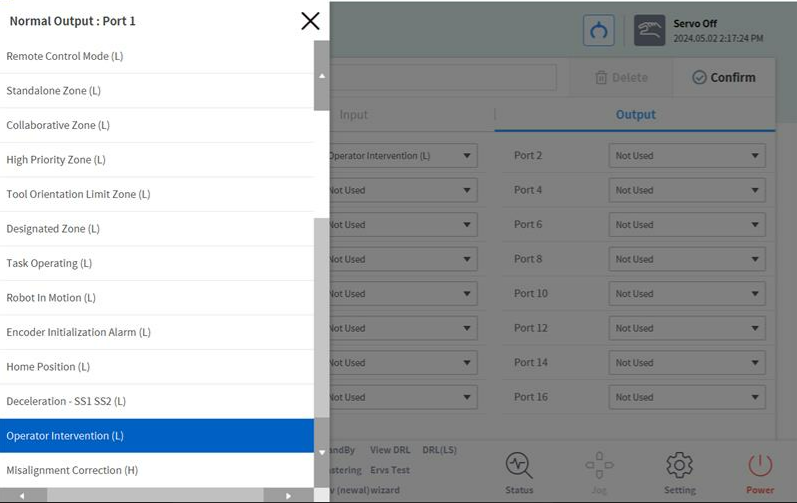
본 기능이 발생한 것을 알리기 위해 Normal Output 기능을 사용할 수 있습니다. 신호는 팝업이 발생 중 유지되고, 팝업 종료 시 비활성화 됩니다.
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
사용 시나리오는 다음과 같습니다.
프로그램 실행 중 유저 혹은 연결된 장치를 통해 디지털 입력 신호를 수신합니다.
로봇은 일시 정지하며, 작업자 개입 팝업이 발생합니다.
(직접 교시를 사용하는 경우) Use Handguiding 버튼을 누른 후, cockpit 혹은 teaching pendant 뒷면의 버튼을 눌러 직접 교시를 동작 시킵니다. 직접 교시 동작 완료 후 End Handguiding 버튼을 누릅니다.
Move along the path 버튼을 눌러 로봇을 Path 위로 이동 시킵니다.
원하는 만큼 로봇을 이동 시킨 후 Resume 버튼을 누르면 로봇의 Task가 재개되며, 팝업이 종료됩니다.