시스템 부팅
전원이 켜지면 시스템 부팅이 시작됩니다. 부팅이 완료되면 시스템 운용 프로그램이 티치 펜던트의 화면에 나타납니다. 시스템 운용 프로그램에 대한 자세한 설명은 프로그램 화면 구성을 참조하십시오.
DART-Platform (for Windows)의 경우
- 데스크톱 혹은 랩톱에 설치된 DART-platform을 실행합니다.
- 컨트롤러의 부팅이 완료될 때까지 약 5분 정도 대기하십시오.
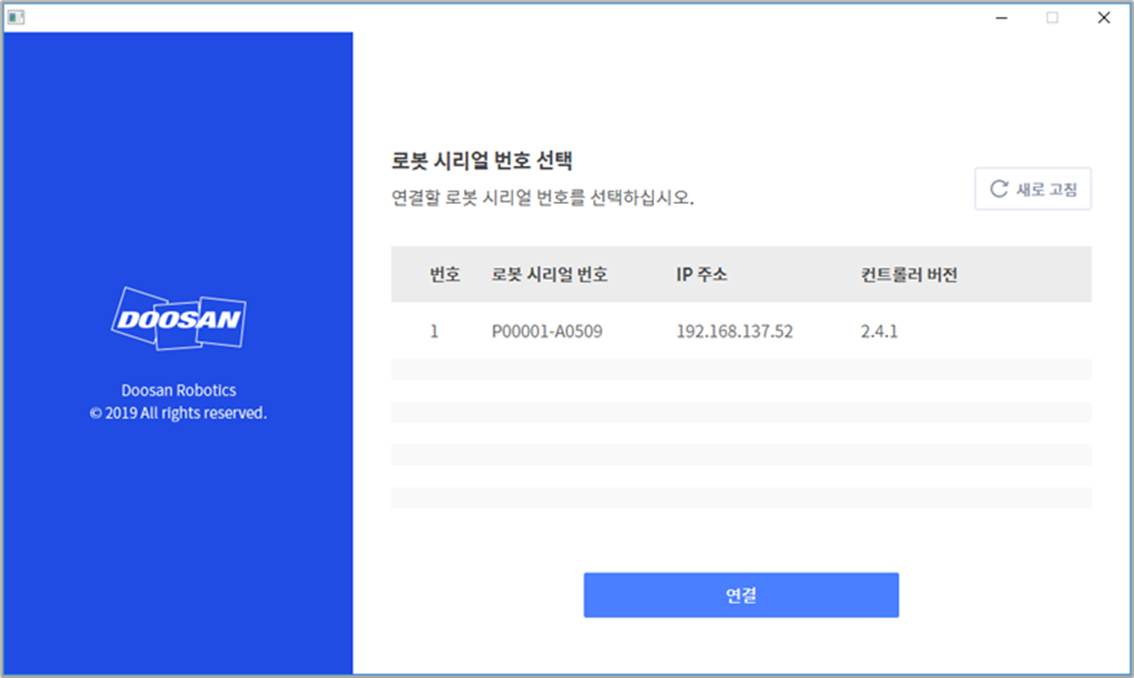
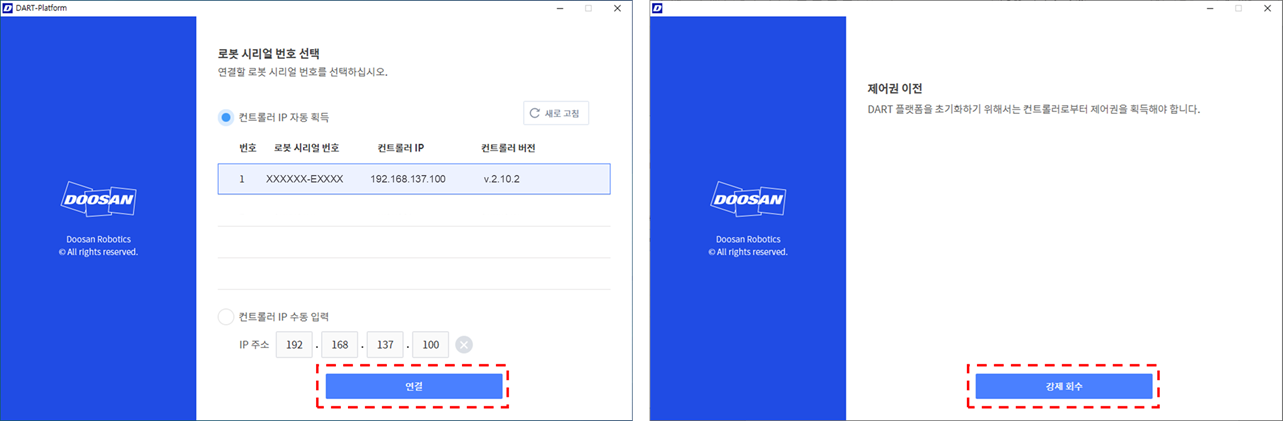
- IP 가 조회되면 네트워크에 연결된 로봇의 시리얼 번호를 확인합니다.
- 연결하고자 하는 로봇을 선택 후 '연결' 버튼을 누르십시오.
- 제어권 이전을 위해 강제 회수 버튼을 누르십시오.
알아두기
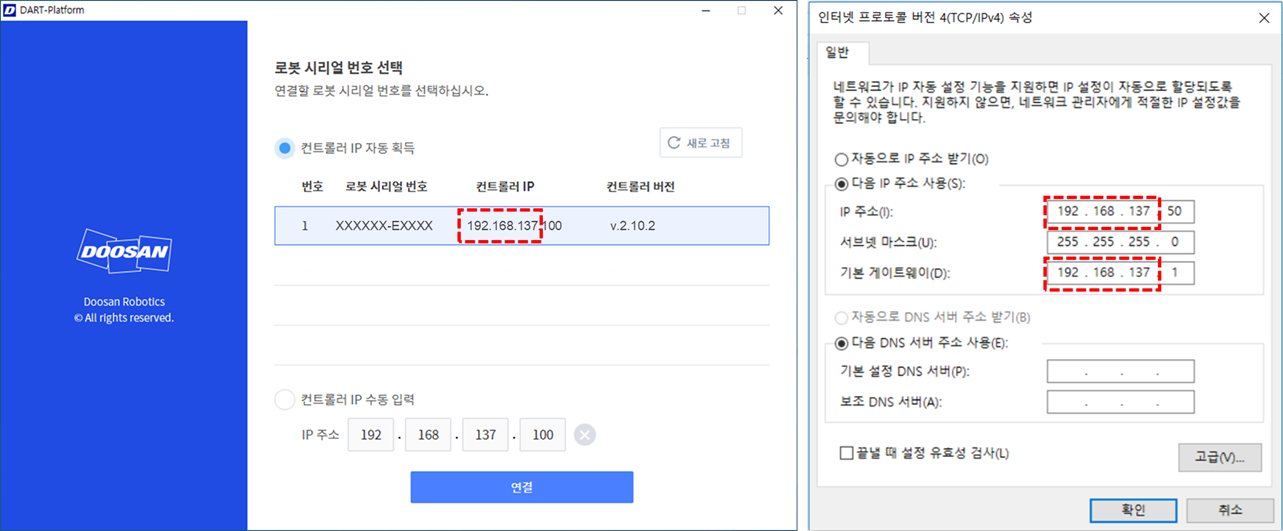
- 컨트롤러와 DART-Platform간 연결이 되지 않으면, DART-Platform이 설치된 데스크탑 혹은 랩탑의 인터넷 프로토콜 속성의 IP 주소와 기본 게이트웨이를 컨트롤러의 IP 주소의 C Class 대역까지 동일하게 변경한 후, 연결 시도하십시오.
- IP가 조회되지 않는 경우 '컨트롤러 IP 수동입력'을 선택 후 연결을 진행하십시오. 컨트롤러의 기본 IP 주소는168.137.100으로 설정되어 있습니다.
- 제어권 강제 회수에 계속 실패하는 경우 다음 사항을 확인하십시오.
- 프로그램을 종료 후 재시작 해주십시오.
- 비상정지 버튼이 해제된 상태가 맞는지 확인하십시오.
- 컨트롤러 내 디지털 입력 포트를 안전입출력 설정에서 Emergency Stop / Remote Emergency Stop / STO 신호(Active Low)로 지정하였다면, 해당 신호가 비인가 상태(High)가 되도록 하십시오.
- 컨트롤러의 부팅 완료 여부를 확인하십시오.
- 로봇의 상태를 확인하십시오. 원격제어, 안전복구, 혹은 무동력동작 상태인 경우 DART-platform 실행에 실패할 수 있습니다.
알아두기
- 서보 온(Servo On): 로봇의 자세를 이동하기 위해서는 로봇의 조인트에 전원이 투입되어 로봇의 상태가 대기 상태로 전환되는 서보 온 상태가 되어야 합니다. 서보 온에 대한 자세한 내용은 서보 온 이란? 을 참조하십시오.
- 날짜 및 시간 설정: 티치 펜던트에 나타나는 날짜 및 시간과 로봇에 저장되는 로그 메시지는 시스템 운용 프로그램에 설정된 날짜 및 시간을 기준으로 표시되므로 최초 부팅 후 날짜 및 시간을 설정해야 합니다. 날짜 및 시간 설정하는 방법은 날짜 및 시간 설정하기 를 참조하십시오.
- DART Platform 이용하여 티치 펜던트와 동일한 환경으로 로봇 제어가 가능합니다.
- DART Platform의 경우 부팅이 완료되면 네트워크에 연결된 로봇을 보여주는 화면을 보여주며, 이 화면에서 연결하고자 하는 로봇의 시리얼 번호를 확인하여 연결하는 과정을 거칩니다.
- 로봇, 컨트롤러, 스마트 비전 모듈(스마트 비전이 연결되어 있는 경우)의 소프트웨어 버전 차이 발생 시 경고 팝업 창이 표시됩니다.