
MoveJ/MoveL 명령어 예제 따라하기
MENDATORY NORMAL 20 MIN

주의
- 예제를 시작하기 전에 반드시 사용 시 주의사항 을 확인하십시오. 자세한 내용은 PART 1. 안전 매뉴얼 을 참조하십시오.
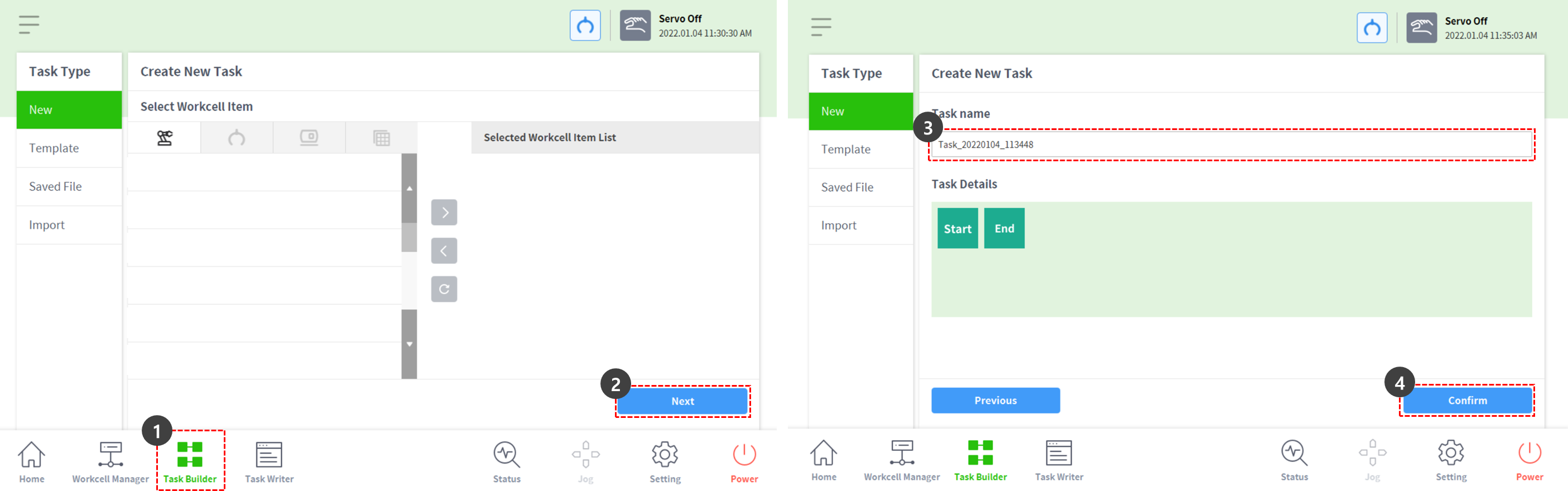
- 화면 하단 바에서 태스크 빌더(Task Builder)를 선택합니다.
- 태스크 라이터(Task Writer)에서의 프로그래밍 방식도 태스크 빌더와 거의 모든 과정이 동일합니다.
- 다음(Next) 버튼을 누르십시오.
- 그리퍼 등 등록된 워크셀 아이템을 활용하여 프로그램을 구성한다면 워크셀 아이템을 추가해야 합니다.
- 이 예제에서는 워크셀 아이템 및 스킬을 사용하지 않으므로 아무것도 선택하지 않고 다음(Next) 버튼을 누릅니다.
- 태스크 이름(Task name)을 작성하십시오.
- 확인(Confirm) 버튼을 누르십시오.
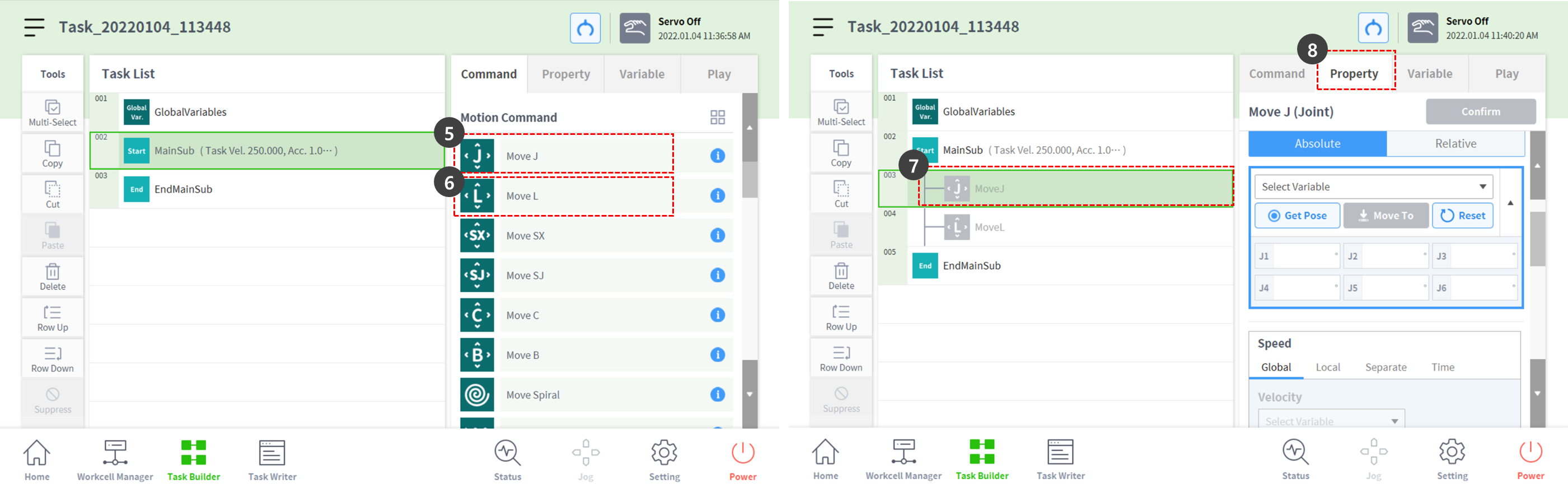
- 두 번째 줄의 MainSub를 선택한 채로 MoveJ을 눌러 MoveJ 명령어를 태스크 리스트에 추가하십시오.
- 선택한 줄의 다음 줄에 명령어가 추가됩니다.
- MoveL을 눌러 MoveL 명령어를 태스크 리스트에 추가하십시오.
- 태스크 리스트 세 번째 줄의 MoveJ 를 선택하십시오.
- 우측 상단의 속성(Property) 탭을 선택하십시오. 속성 탭에서는 명령어의 속성 값들을 설정할 수 있습니다.
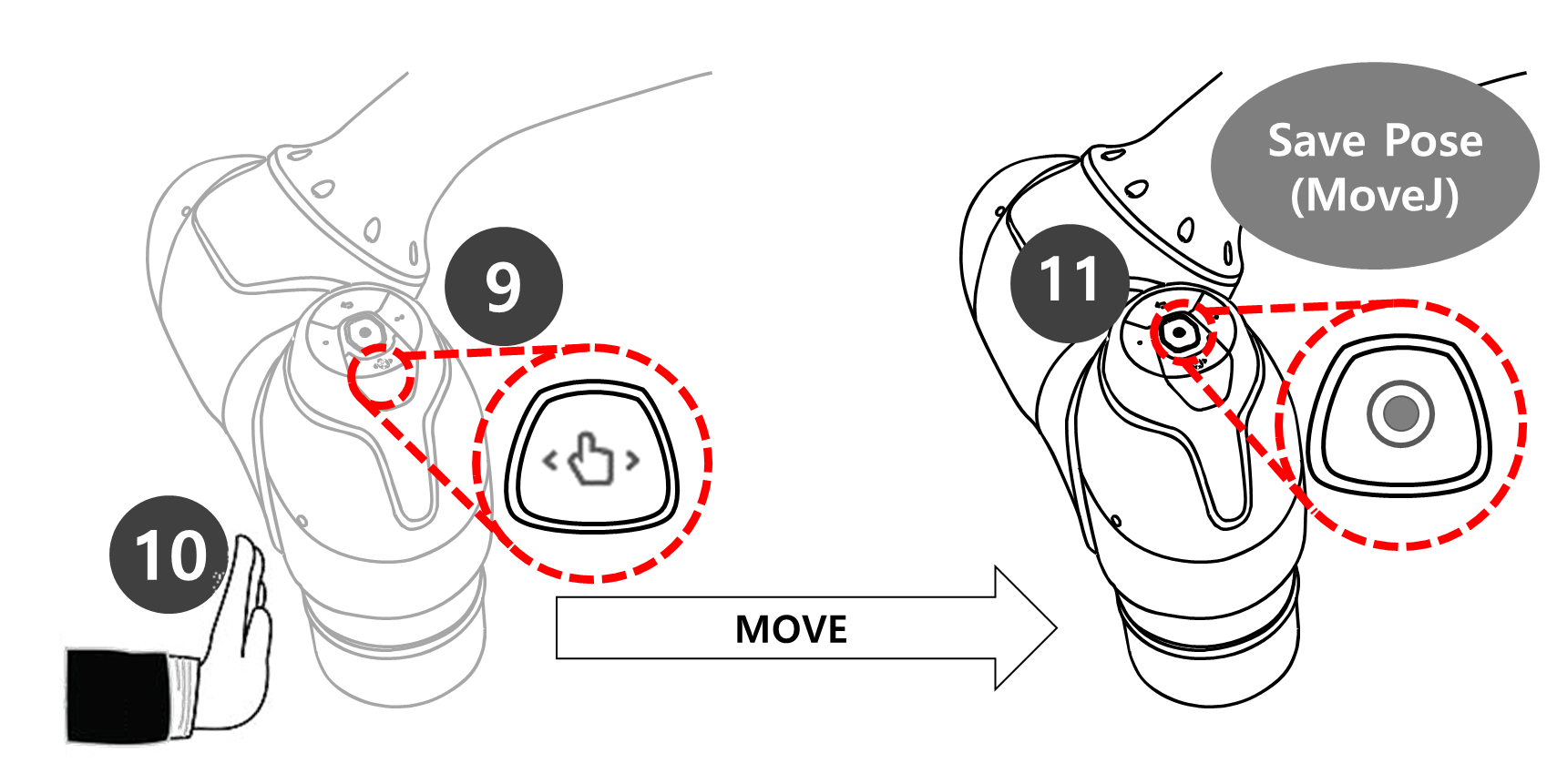
- 한 손으로 로봇 끝단의 상단에 부착된 콕피트에서 손 모양의 핸드가이딩 버튼을 누른 채로 유지하십시오. 9번 ~ 11번 과정은 MoveJ의 포즈(Pose)를 저장합니다.
- 콕피트를 사용할 수 없는 로봇의 경우 하단의 '알아두기'를 확인하십시오.
- 다른 한 손으로 로봇을 밀어 안전한 위치로 이동 시키십시오.
- 핸드 가이딩 버튼에서 손을 떼고 포즈 저장 버튼을 누르십시오.
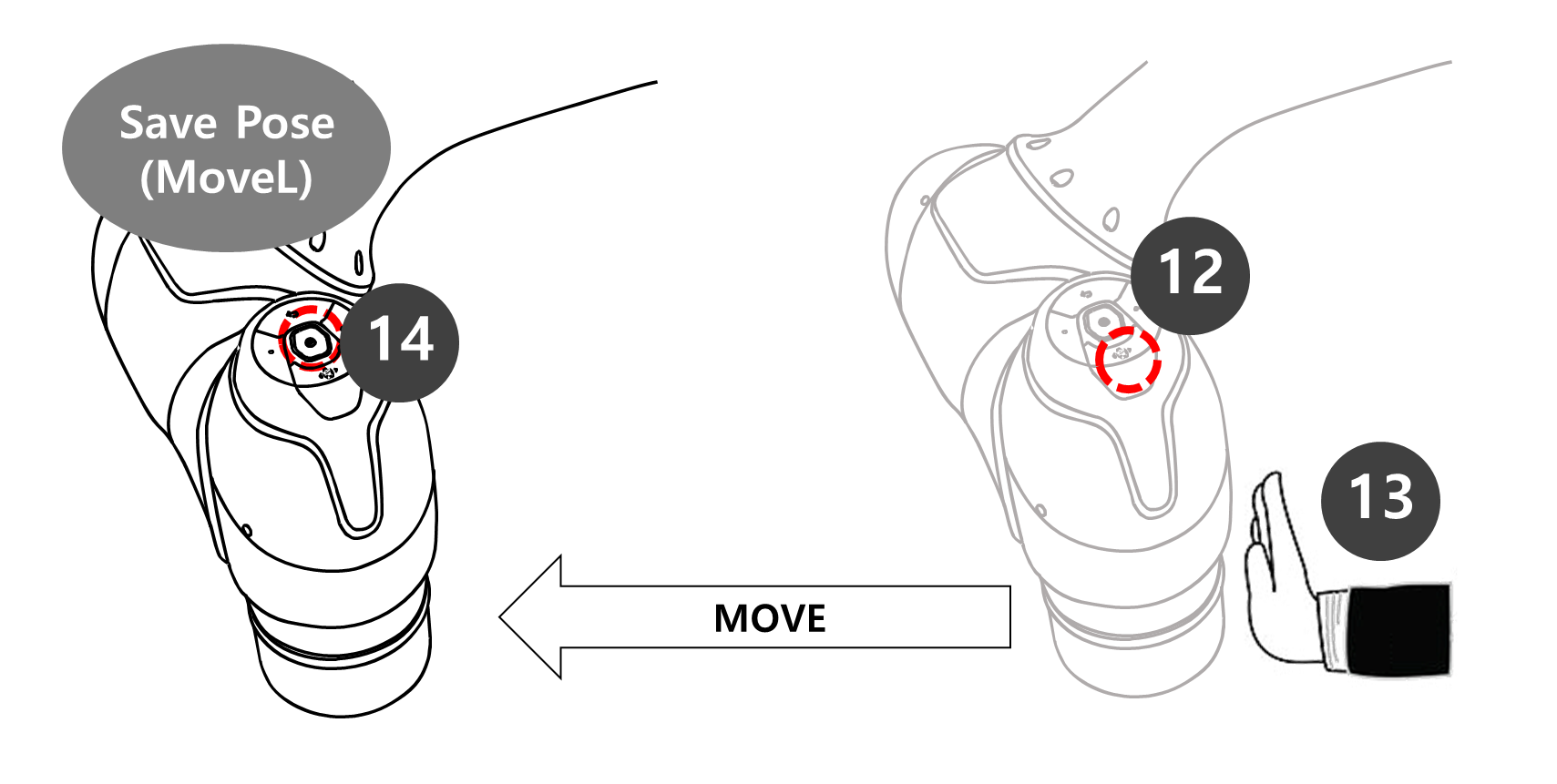
- 한 손으로 로봇 끝단의 상단에 부착된 콕피트에서 손 모양의 핸드가이딩 버튼을 누른 채로 유지하십시오. 12번 ~ 14번 과정은 MoveL의 포즈(Pose)를 저장합니다.
- 태스크 리스트에서 MoveL을 따로 선택할 필요가 없습니다. 포즈 저장 버튼을 누르는 경우 태스크 리스트에서 다음 태스크 라인으로 자동으로 이동합니다.
- 다른 한 손으로 로봇을 밀어 안전한 위치로 이동 시키십시오.
- 핸드 가이딩 버튼에서 손을 떼고 포즈 저장 버튼을 누르십시오.
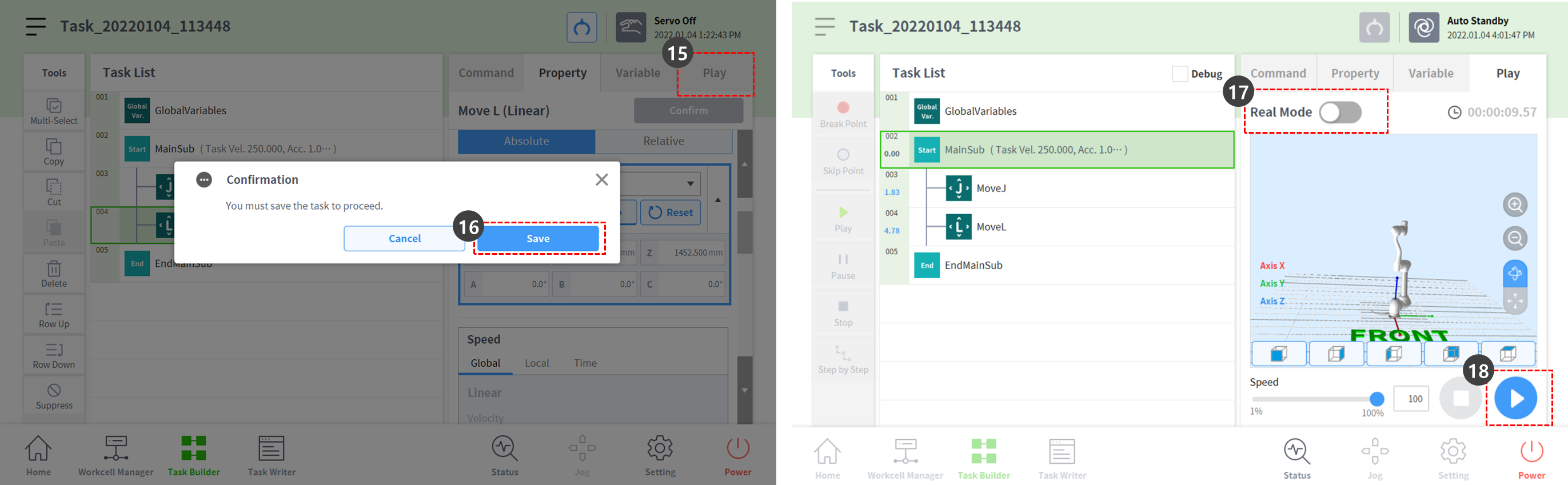
- 태스크를 실행하기 위해 플레이(Play) 탭을 누르십시오.
- 태스크를 저장하지 않았기 때문에 태스크를 저장하라는 팝업창이 나타납니다. 저장(Save)를 누르십시오.
- 실제모드(Real Mode) 토클 버튼을 비활성화 상태(회색)으로 설정하십시오.
- 실제모드(Real Mode)를 비활성화하는 경우 로봇이 움직이지 않고 화면의 시뮬레이터에서만 가상의 로봇이 움직이게 됩니다.
- 태스크를 실행 전에는 이 시뮬레이션 모드를 통해 태스크를 시험해보시기 바랍니다.
- 우측 하단의 Play 버튼을 누르십시오.
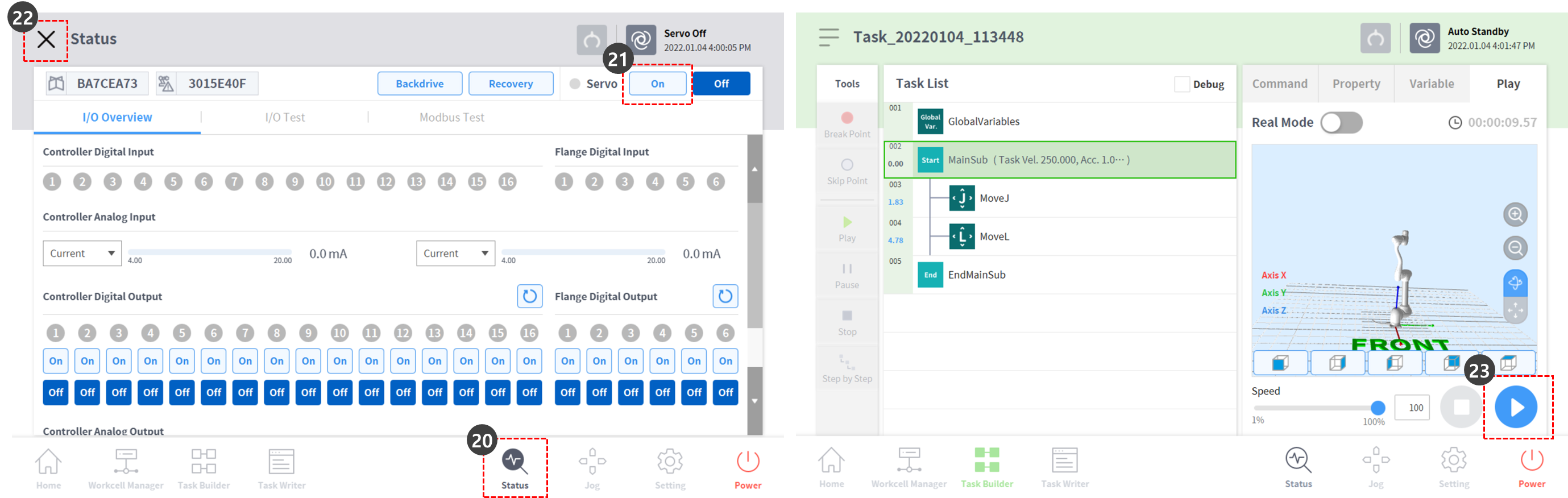
- 로봇이 준비 상태가 아니라는 에러 메시지가 발생합니다. X 버튼을 눌러 팝업창을 닫으십시오.

- 로봇은 서보 온 상태에서만 움직일 수 있습니다.
- 로봇의 서보 온, 서보 오프는 상태(Status) > 서보(Servo) 에서 On, Off 할 수 있습니다.
- 로봇을 준비 상태로 만들기 위해 로봇을 서보 온해야 합니다. 하단 바에서 상태(Status)를 선택하십시오.
- 서보 온 버튼을 누르십시오.
- 좌측 상단의 X 버튼을 눌러 Status 창을 닫으십시오.
- 다시 우측 하단의 Play 버튼을 누르십시오. 로봇이 시뮬레이터에서 성공적으로 움직일 것입니다.
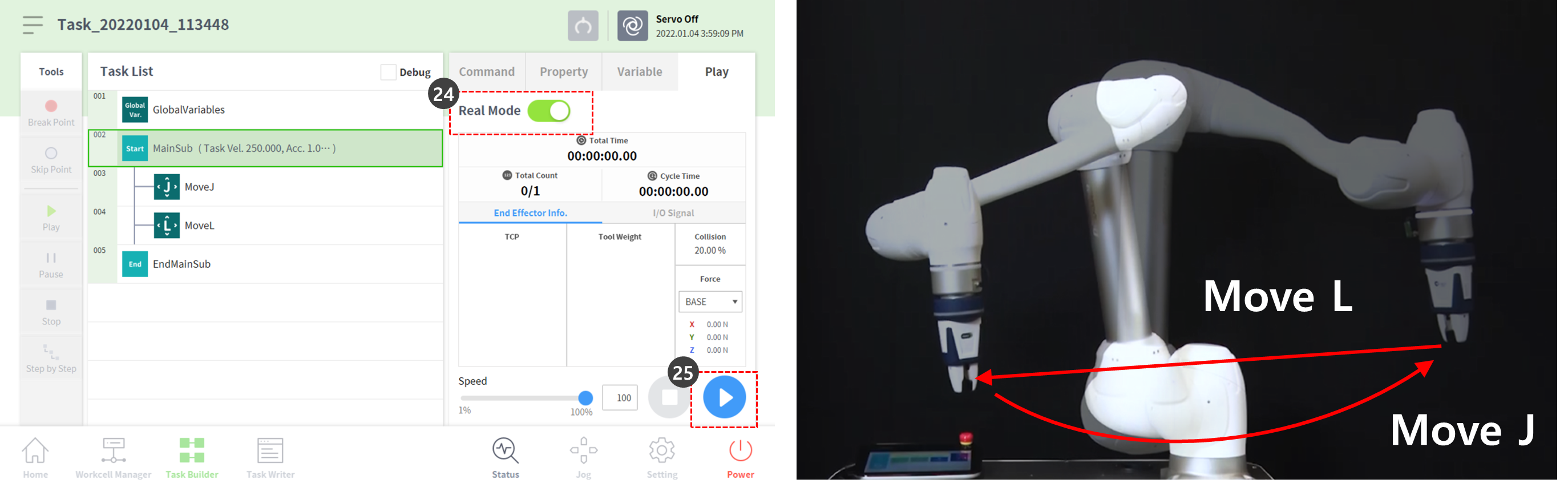
- 실제 로봇을 구동하기 위해 실제모드(Real Mode) 토클 버튼을 활성화 상태(초록색)으로 설정하십시오.
- 우측 하단의 Play 버튼을 누르십시오. 실제 로봇이 성공적으로 움직일 것입니다.
알아두기
콕피트의 포즈 저장 버튼은 티치펜던트 화면에서 다음의 순서대로 작업을 수행하는 것과 동일한 기능으로 동작합니다.
- 속성(Property) > 포즈 저장(Get Pose) 버튼을 눌러 현재 위치를 위치 정보로 불러옵니다.
- 확인(Confirm) 버튼을 눌러 명령어 속성의 변경 사항을 저장합니다.
- 다음 명령어를 선택합니다.
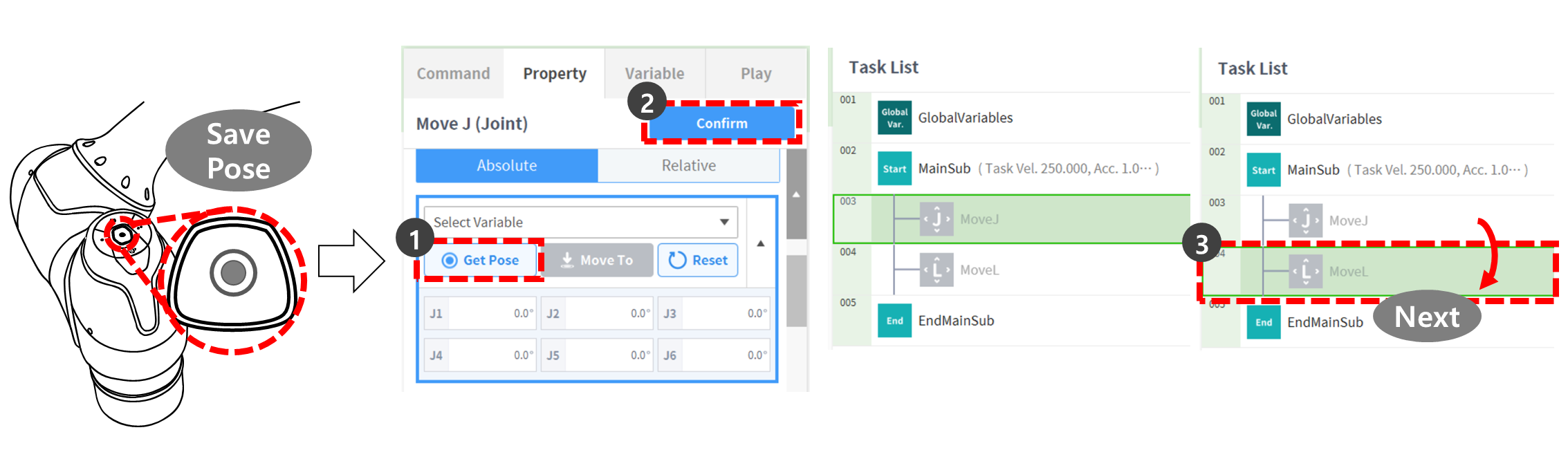
이를 응용하여 여러 모션 명령어를 태스크 리스트에 한번에 추가한 후에 콕피트의 핸드가이딩 버튼을 누른채 로봇을 이동한 후 포즈 저장 버튼을 누르는 작업을 반복하여 빠르게 태스크를 프로그래밍할 수 있습니다.