
Robot 설정하기
Robot 정보 설정하기
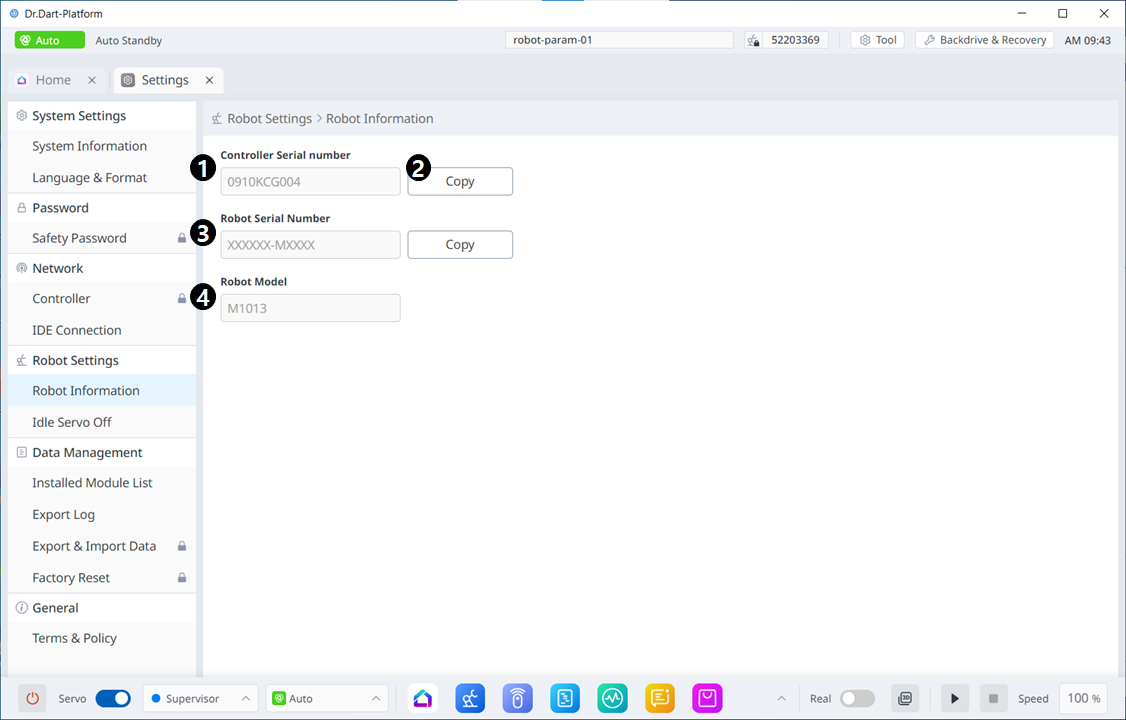
메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | 제어기 시리얼 번호 | 제어기 시리얼 번호가 보여집니다. |
| 2 | 제어기 시리얼 번호 복사 | 시리얼 번호를 복사할 수 있습니다. |
| 3 | 로봇 시리얼 번호 | 로봇 시리얼 번호가 보여집니다. |
| 4 | 로봇 모델 | 로봇 모델명이 나타납니다. |
Robot 유휴 서보 오프
일정 시간 동안 로봇 유휴 시 자동으로 로봇을 안전 오프 상태로 전환합니다. 기본 값은 5분이며 사용자가 정의한 시간으로 변경할 수 있습니다.
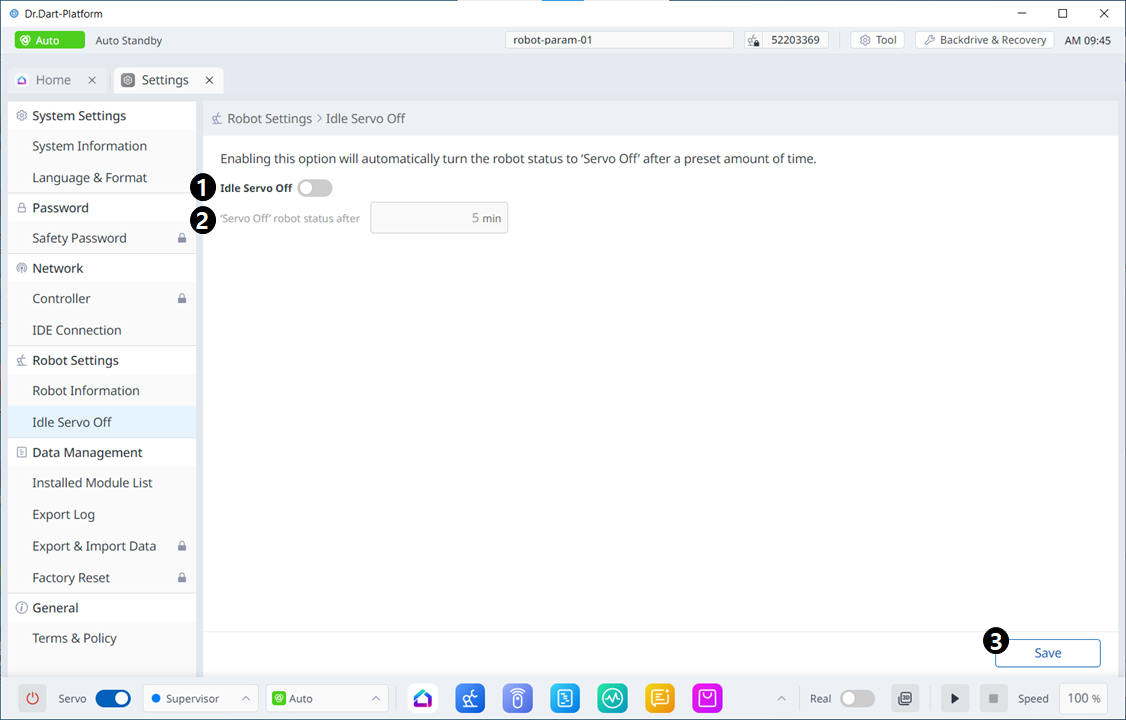
메뉴 항목
항목 | 설명 | |
|---|---|---|
| 1 | 유휴 서보 오프 활성화 | 유휴 서보 오프를 활성화 시킬 수 있습니다. |
| 2 | 서보 오프 설정 | 유휴 서보 오프를 분 단위로 설정 가능합니다. |
| 3 | Save | 변경한 설정을 저장할 수 있습니다. |
마찰 보정
해당 메뉴는 E, A 시리즈 로봇일때만 접근이 가능합니다.
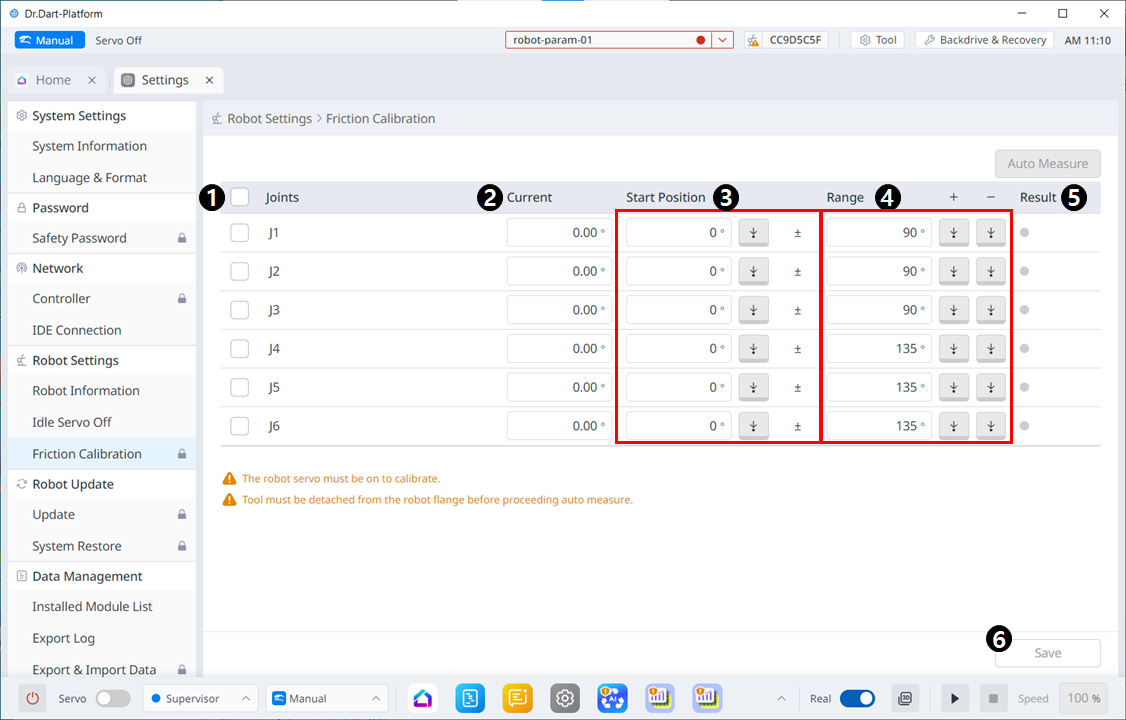
메뉴 항목
항목 | 설명 | |
|---|---|---|
| 1 | Joint Check Box | Auto Measure할 Joint를 선택합니다. |
| 2 | Current | 현재 로봇 자세를 표시합니다. |
| 3 | Start Position | Auto Measure 수행시 joint가 시작될 자세를 입력합니다. 선택하지 않은 축도 입력이 필요합니다. |
| 4 | Range | 해당 축이 움직일 범위를 입력합니다. 체크된 축만 입력 허용합니다. |
| 5 | Result | Auto measure에 대한 결과를 표시합니다. |
| 6 | Save | 측정된 결과를 하위에 적용합니다. |