
Remote Control 모듈
Remote Control 모듈은 이미 만든 태스크에 대해 원격 제어를 실행할 수 있는 모듈입니다.
작업자 권한에서는 리모트 컨트롤 모드를 시작할 수 있으나 IO 설정은 수정할 수 없습니다. IO 설정 변경은 수동 모드에서만 수행할 수 있습니다.
메뉴 구성
항목 | 설명 | |
|---|---|---|
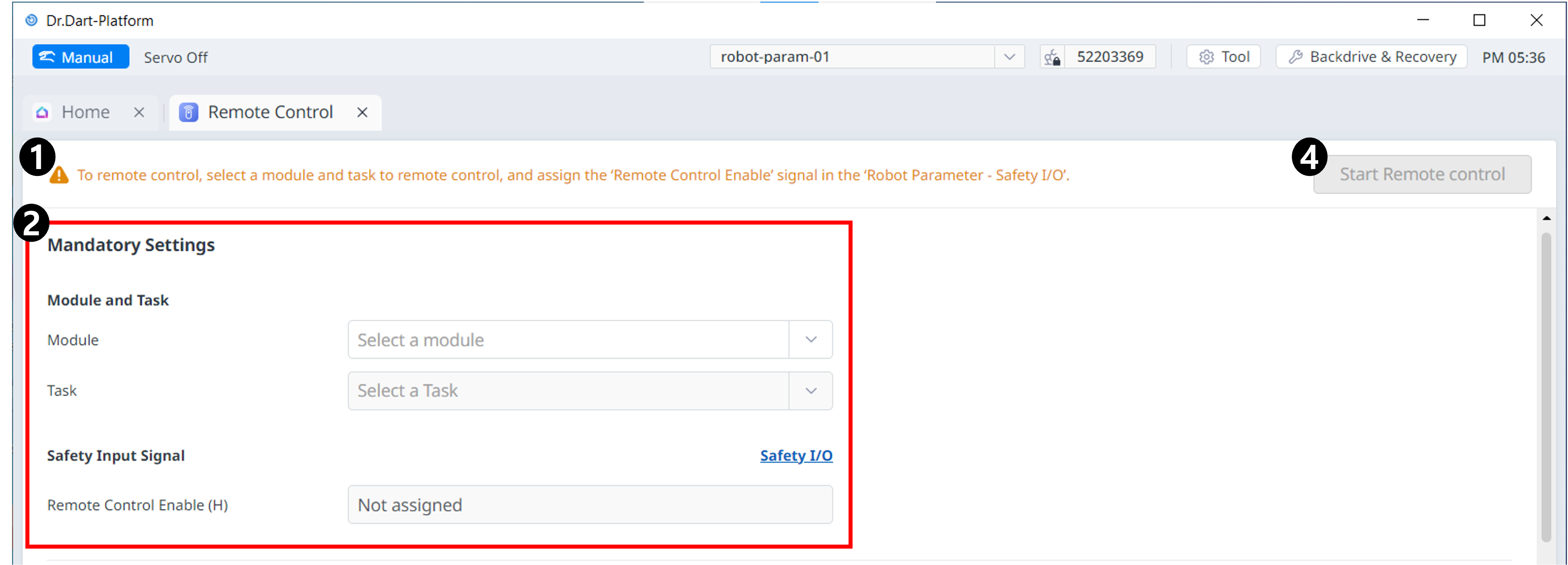
| 1 | 주의사항 | 모듈을 사용할 때 필요한 주의 사항을 안내합니다. |
| 2 | 필수 설정 | 원격 제어를 위해 필수적으로 설정해야 할 항목입니다. 모듈 및 태스크를 설정하고 안전 입력 신호를 설정할 수 있습니다. |
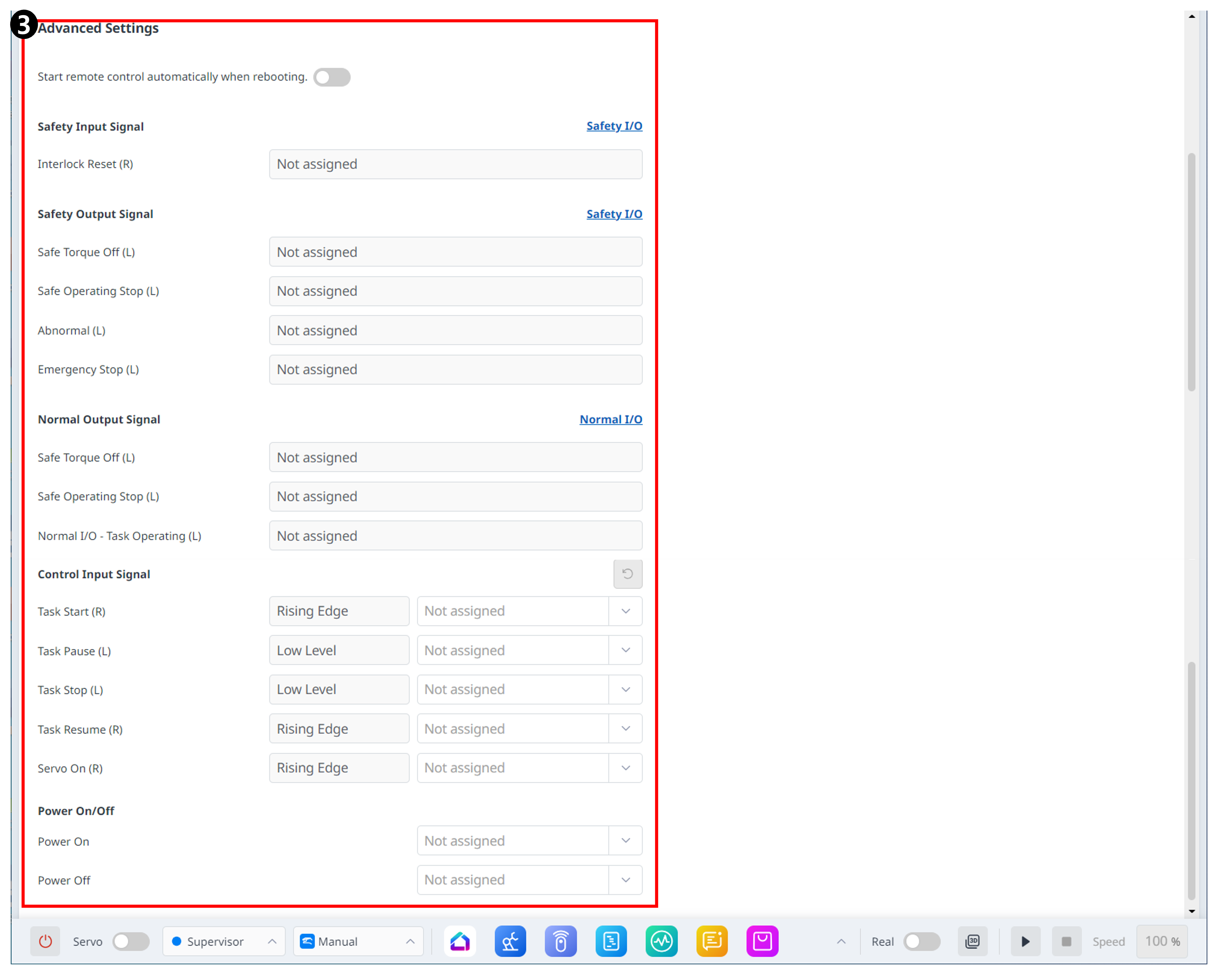
| 3 | 고급 설정 | 원격 제어를 위한 고급 설정이 가능한 항목입니다. 태스크의 시작/일시정지/정지/재개/서보 온 등에 대해 각 포트 별로 설정 가능합니다. 리부트 후 자동으로 원격제어 실행하는 것으로 설정할 경우, Dart-Platform을 재부팅했을 때 바로 원격제어가 실행됩니다. |
| 4 | 원격 제어 시작하기 | 모든 설정을 끝낸 뒤 원격 제어를 시작할 수 있는 버튼입니다. |
설정 항목
필수 설정
필수 설정에서는 리모트 컨트롤 실행에 반드시 필요한 항목을 설정해야 합니다.
이 설정을 완료해야 Remote Control 기능을 사용할 수 있습니다.
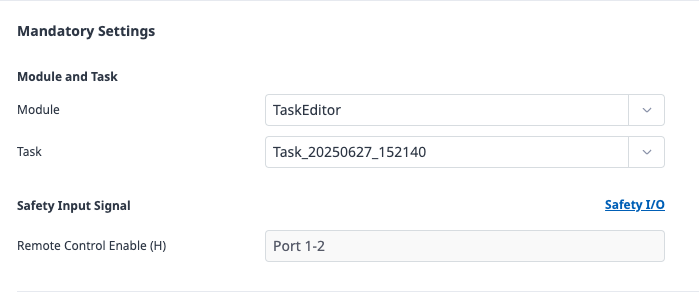
모듈과 태스크 선택
원격 제어를 지원하는 모듈을 선택하고, 해당 모듈 내에서 제어할 태스크를 지정합니다.안전 입력 신호
원격 제어 활성화 신호를 설정합니다.
Robot Parameter 모듈의 안전 입출력 탭에서 지정할 수 있습니다.
고급 설정
고급 설정에서는 리모트 컨트롤 사용 시 필요한 선택 기능을 추가로 설정할 수 있습니다.
이 설정들은 선택 사항이며, 설정하지 않아도 기본 Remote Control 기능은 사용 가능합니다.
재부팅 시 원격 제어 자동 시작

토글 버튼을 ON으로 설정 시, 로봇 재부팅 후 원격 제어 모드 화면으로 자동 진입됩니다.
고급 신호 설정
아래 신호들은 모두 선택적으로 설정할 수 있습니다.
공통 주의사항
필수 지정 항목이 아닙니다.
동일한 포트 및 시그널이 중복 지정되는 것은 허용되지 않습니다.
안전 입력 신호

연동 장치 초기화 신호를 설정합니다.
Robot Parameter 모듈의 안전 입출력 > 연동 장치 초기화 항목과 동일하게 동작합니다.
안전 출력 신호
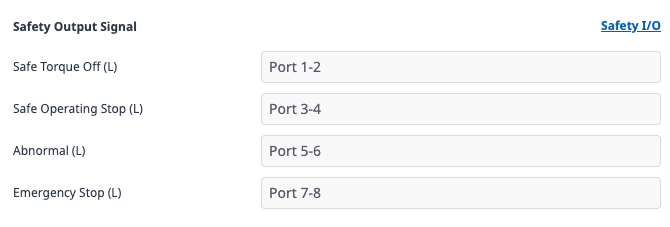
안전 토크 오프, 안전 작동 정지, 비정상, 비상 정지 시그널의 출력 포트를 저장할 수 있습니다.
Robot Parameter 모듈의 안전 출력 신호 항목에 안전 토크 오프, 안전 작동 정지, 비정상, 비상 정지 신호가 이미 설정되어 있는 경우 해당 설정이 적용됩니다.
알아두기
각 신호에 대한 자세한 정보는 안전 신호 입출력(Safety I/O) 을 참조하십시오.
일반 출력 신호
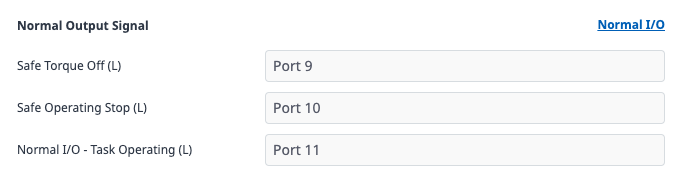
안전 토크 오프, 안전 작동 정지, 태스크 작동 시그널의 출력 포트를 저장할 수 있습니다.
Robot Parameter 모듈의 일반 출력 신호 항목에 동일 시그널이 이미 설정되어 있는 경우 해당 설정이 적용됩니다.
제어 입력 신호
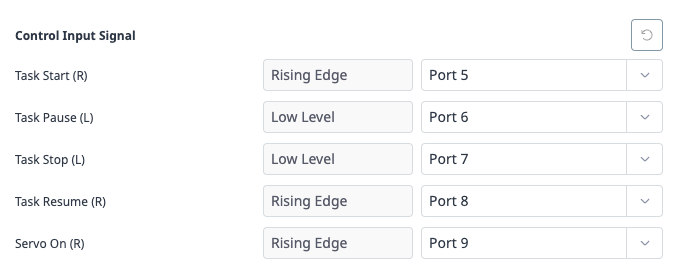
태스크 시작, 일시정지, 정지, 재개 및 서보 켜기 명령의 입력용 포트를 지정할 수 있습니다.
새로고침 버튼을 눌러 제어 입력 신호를 초기화할 수 있습니다.
전원 켜기/끄기

전원 켜기/끄기 용 입력 포트를 설정할 수 있습니다.
신호 포트 옆에 표시되는 설명은 해당 신호의 동작 조건을 나타냅니다.
상승 엣지
입력 신호가 상승하는 경우 활성화 됩니다.예를 들어, 태스크 시작 신호는 입력이 0V에서 24V로 상승하는 순간 활성화됩니다.
재시도 시 신호를 다시 0V로 낮춘 후 상승시켜야 합니다.
저레벨
정지 신호가 기동 신호보다 우선합니다.
예를 들어, 정지 신호가 저레벨일 경우 태스크 시작 신호는 무시되며 “원격 IO 신호 무시됨” 메시지가 표시됩니다.