
I/O Alias & Mount
I/O Alias
메뉴 구성
항목 | 설명 | |
|---|---|---|
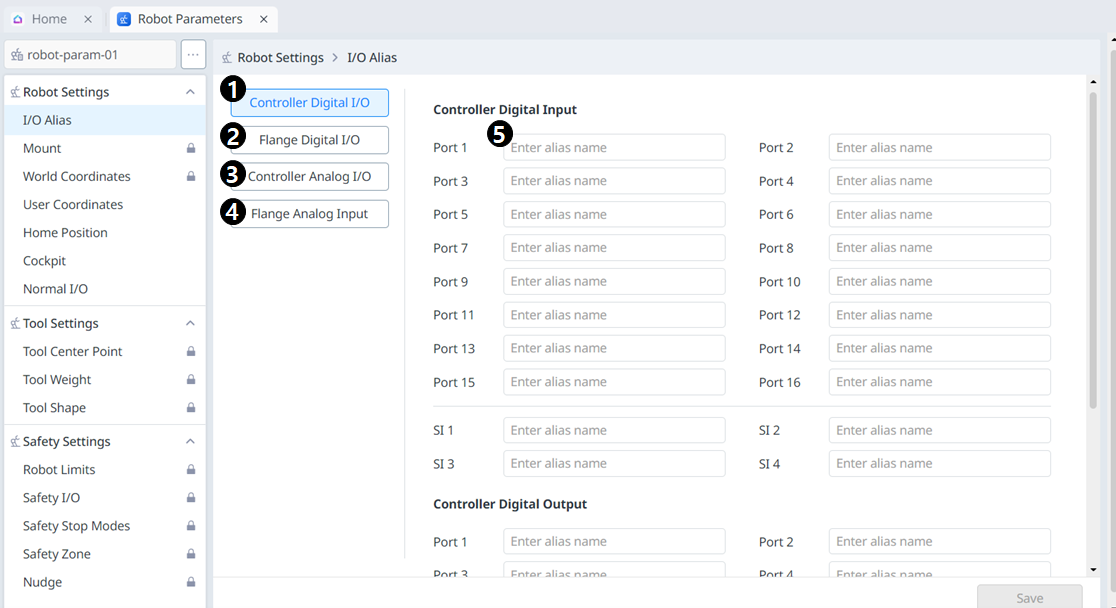
| 1 | 제어기 디지털 I/O | 제어기 디지털 I/O의 이름을 각각 설정할 수 있습니다. |
| 2 | 플랜지 디지털 I/O | 플랜지 디지털 I/O의 이름을 각각 설정할 수 있습니다. |
| 3 | 제어기 아날로그 I/O | 제어기 아날로그 I/O의 이름을 각각 설정할 수 있습니다. |
| 4 | 플랜지 아날로그 Input | 플랜지 아날로그 Input의 이름을 각각 설정할 수 있습니다. |
| 5 | I/O 이름 | 최대 40자로 이름 설정이 가능합니다. |
Mount
로봇 설치 자세(Mount) 메뉴에서 로봇 설치 자세를 설정할 수 있습니다. 로봇이 평평한 바닥에 설치되는 경우에는 이 과정을 건너뛸 수 있습니다.
로봇 설치 자세는 Robot Parameters > Robot Settings > Mount 를 선택하여 설정할 수 있습니다.
자동 계산(Auto Measure) 기능을 사용하여 설치 각도를 측정할 수 있습니다. 단 경사가 5도 미만일 경우 자동 계산은 사용이 불가능합니다.
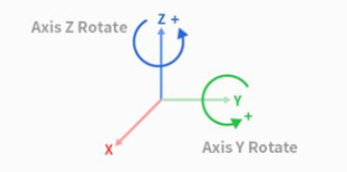
천장 또는 벽에 Robot을 고정 할 때, Y 축의 회전과 Z 축의 회전으로 Robot의 설치 각도를 설정할 수 있습니다.
툴 무게 자동 계산 사용 시 툴 무게는 중력 기반으로 측정이 되기 때문에 Mount 설정 후에는 툴 무게를 다시 설정하시기를 권장합니다.
주의
로봇 설치 자세를 설정하는 경우 월드 좌표계도 같이 변경하시는 것을 권장합니다. 월드 좌표계를 변경하지 않는 경우 티치펜던트의 로봇 시뮬레이터 화면에서 로봇의 자세는 평평한 바닥에 설치한 자세(기본)로 표시됩니다.
메뉴 구성
항목 | 설명 | |
|---|---|---|
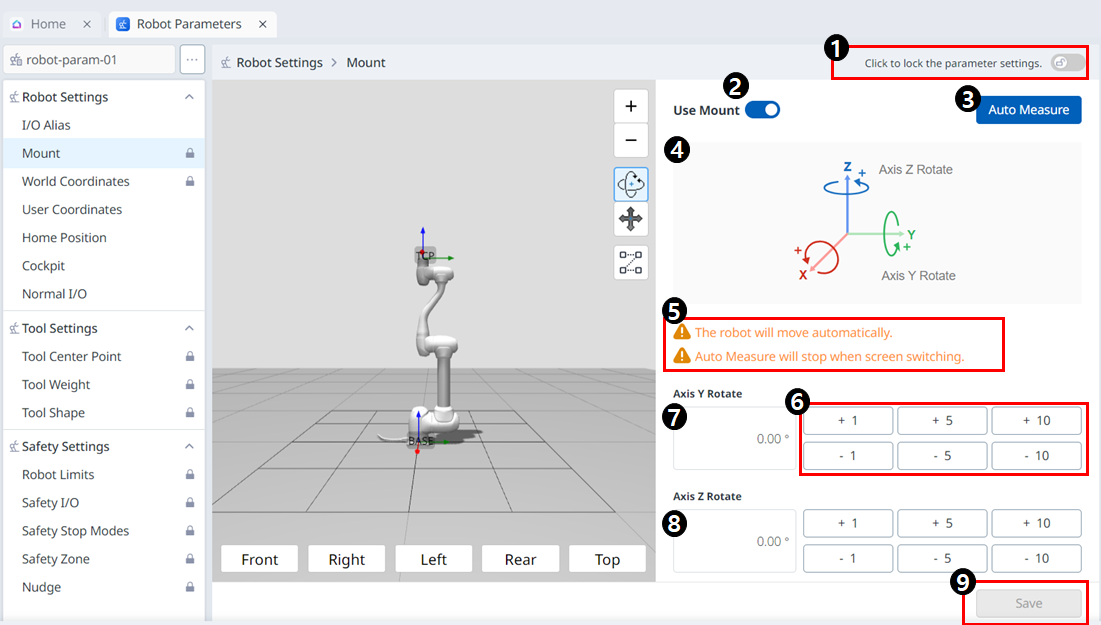
| 1 | 잠금 토글 버튼 | 설정된 값이 잠금 상태가 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
| 2 | Use Mount | Mount 사용을 활성화 하는 버튼입니다. 버튼의 활성화는 잠금을 푼 이후 가능합니다. |
| 3 | Auto Measure | 명령 내려진 작동을 자동으로 합니다. 옆의 3D Simulation에서 이 움직임이 나타납니다. |
| 4 | Information Image | Mount를 위한 팁 이미지입니다. |
| 5 | Information Message | Auto Measure를 위한 팁 메세지입니다. |
| 6 | Increment/Decrement 버튼 | 원하는 수치만큼 Increment 혹은 Decrement 가능합니다. |
| 7 | Y축 Rotate Input Field | Y축 회전 각도를 직접 입력할 수 있습니다. |
| 8 | Z축 Rotate Input Field | Z축 회전 각도를 직접 입력할 수 있습니다. |
| 9 | Apply 버튼 | 설정한 값들을 적용할 수 있습니다. |