로봇 제한치 및 안전
Robot Limits
로봇 제한치(Robot Limits)에서는 로봇에 관련된 여러 제한치를 설정할 수 있습니다. 설정한 제한치 내에서 로봇을 안전하게 구동 시키기 위해 사용합니다.
로봇 제한치는 Robot Parameter> Safety Settings > Robot Limits 를 선택하여 설정할 수 있습니다.
각 제한치에 대한 자세한 설명은 로봇 제한치(Robot Limits)를 참조하십시오.
Robot Limits에는 크게 세 항목으로 나누어 집니다. 각각의 항목은 다음과 같은 화면 및 기능을 포함합니다.
메뉴 구성
항목 | 설명 | |
|---|---|---|
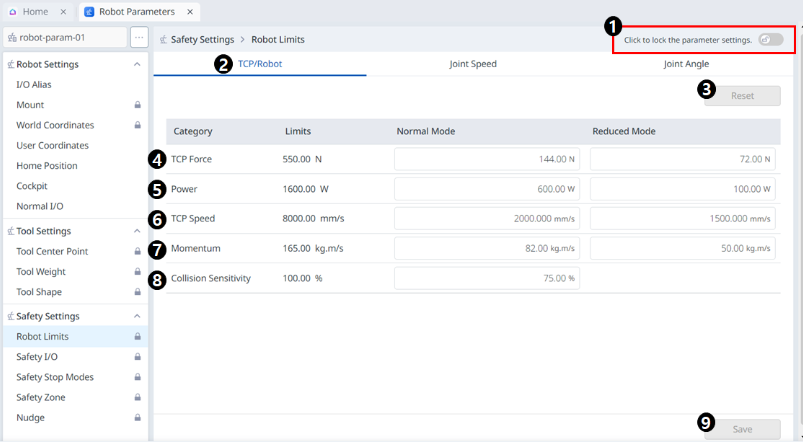
| 1 | Lock 토글 버튼 | 설정된 값이 잠금 상태가 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
| 2 | TCP/Robot | Robot limits의 대 분류입니다. |
| 3 | Reset | 설정을 초기화 할 수 있습니다. |
| 4 | Force | Force 설정이 가능합니다. |
| 5 | Power | 전원의 설정이 가능합니다. |
| 6 | Speed | 속도 설정이 가능합니다. |
| 7 | Momentum | 운동량 설정이 가능합니다. |
| 8 | Collision | 충돌 설정이 가능합니다. |
| 9 | Save | 해당 설정을 저장할 수 있습니다. |
메뉴 구성
항목 | 설명 | |
|---|---|---|
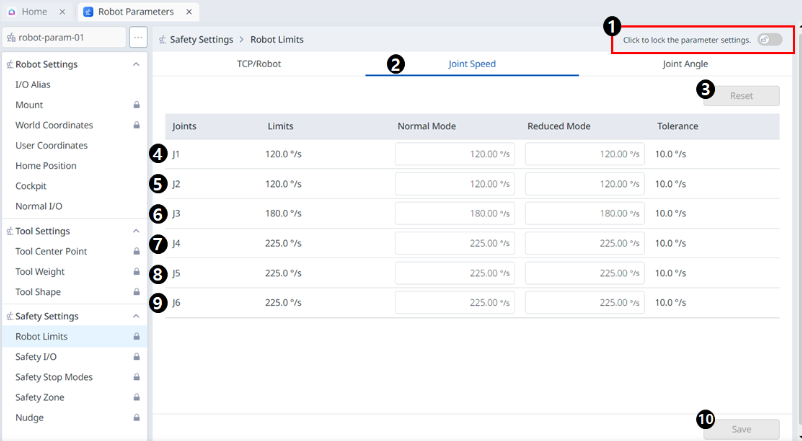
| 1 | Lock 토글 버튼 | 설정된 값이 잠금 상태가 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
| 2 | Joint Speed | Robot limits의 대 분류입니다. |
| 3 | Reset | 설정을 초기화 할 수 있습니다. |
| 4 | J1 | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 5 | J2 | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 6 | J3 | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 7 | J4 (P series 모델은 비활성화) | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 8 | J5 | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 9 | J6 | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 10 | Save | 해당 설정을 저장할 수 있습니다. |
메뉴 구성
항목 | 설명 | |
|---|---|---|
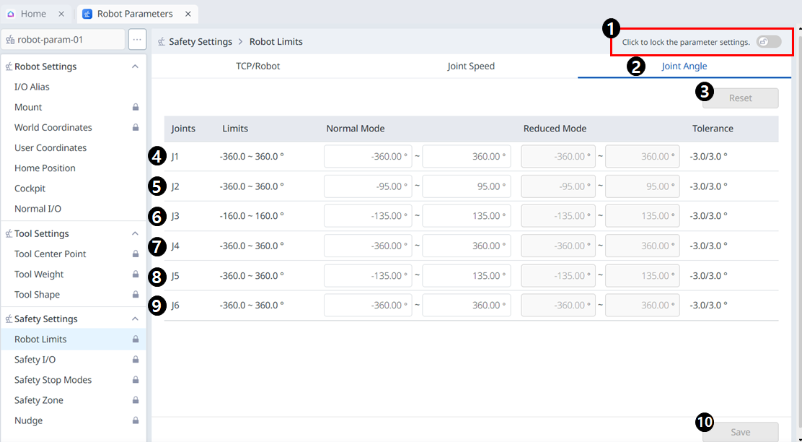
| 1 | Lock 토글 버튼 | 설정된 값이 잠금 상태가 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
| 2 | Joint Angle | Robot limits의 대 분류입니다. |
| 3 | Reset | 설정을 초기화 할 수 있습니다. |
| 4 | J1 | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 5 | J2 | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 6 | J3 | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 7 | J4 (P series 모델은 비활성화) | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 8 | J5 | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 9 | J6 | Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
| 10 | Save | 해당 설정을 저장할 수 있습니다. |
Safety I/O
이중화된 단자로 안전 관련 신호를 입출력하는 기능입니다. 안전 입출력 신호 중 어느 하나라도 이중화된 신호가 다른 것이 감지되면 단선이나 하드웨어 고장으로 판단하여 로봇을 STO정지 모드로 정지시킵니다.
안전 신호 입출력(Safety I/O)를 설정하려면 Robot Parameters > Safety Settings > Safety I/O를 선택하십시오.
자세한 내용은 안전 신호 입출력(Safety I/O)을 참고하십시오.
Input
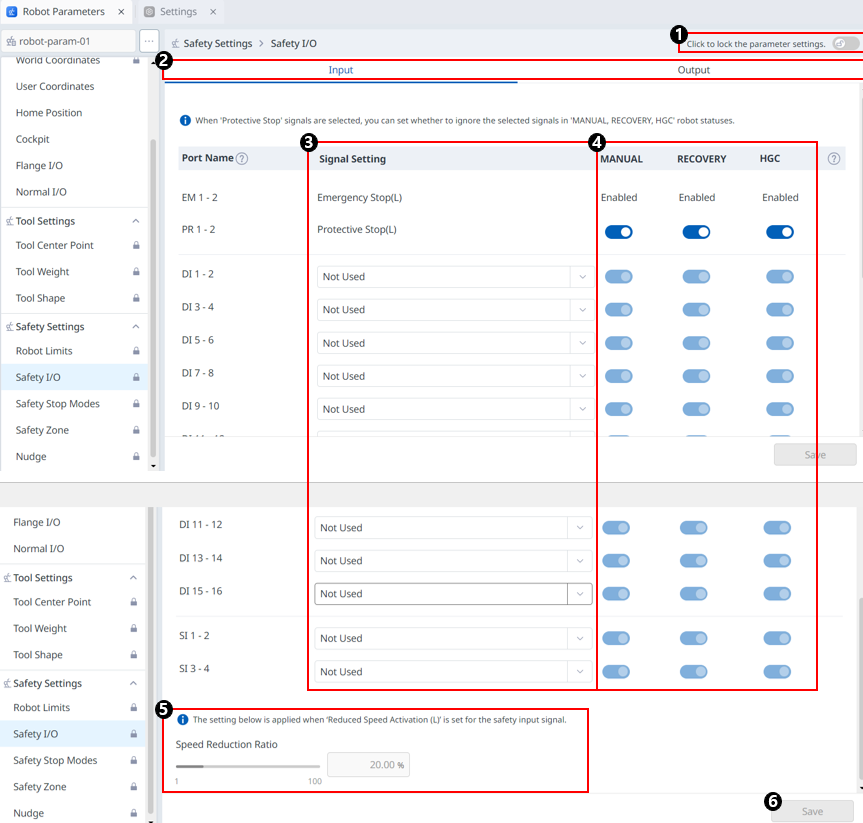
메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | Lock 토글 버튼 | 설정된 값이 잠금 상태 됩니다. 수정을 위해서는 Safety Password를 입력해야 합니다. |
| 2 | Input/Output | Input/Output 중 하나를 택하여 설정할 수 있습니다. |
| 3 | Signal Setting | 각 port 에 설정한 옵션입니다. 설정할 수 있는 옵션은 다음과 같습니다. Not Used |
| 4 | 로봇 상태에 따른 신호 무시 여부 선택 | 'Protective Stop' 신호를 선택하면 'MANUAL, RECOVERY, HGC' 로봇 상태에서 선택된 신호를 무시할지 여부를 설정할 수 있습니다. |
| 5 | 감속률 설정 | 감속률을 설정할 수 있습니다. 0-100까지 가능합니다. |
| 6 | Save | 입력한 설정을 저장할 수 있습니다. |
Output
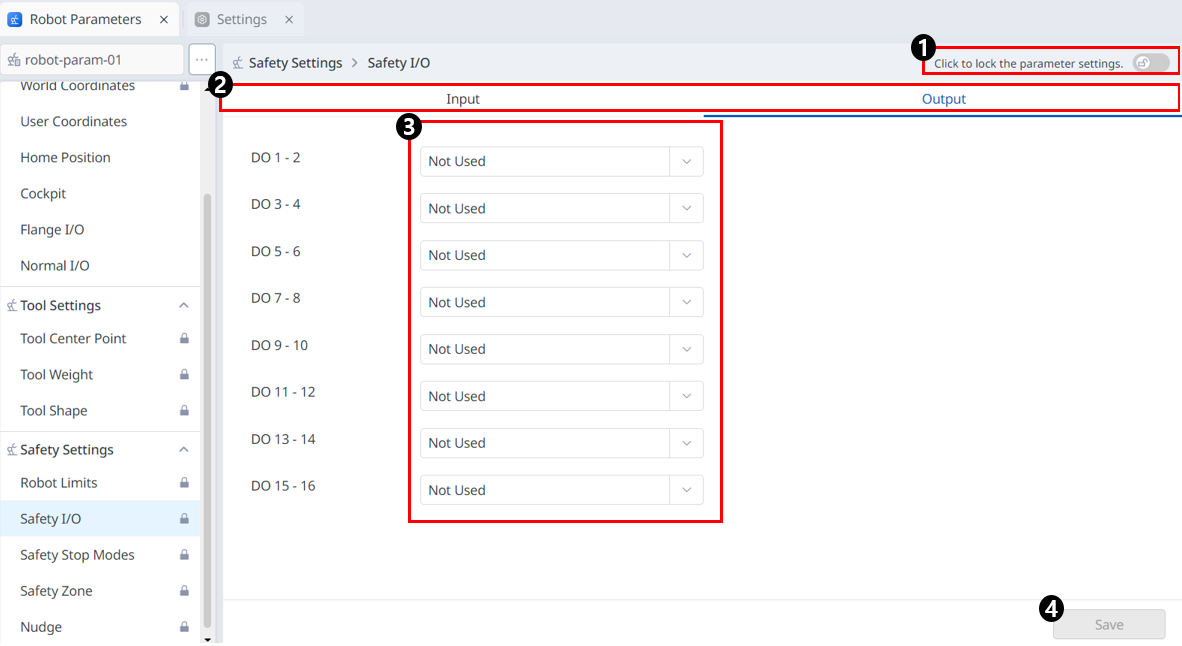
메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | Lock 토글 버튼 | 설정된 값이 잠금 상태 됩니다. 수정을 위해서는 Safety Password를 입력해야 합니다. |
| 2 | Input/Output | Input/Output 중 하나를 택하여 설정할 수 있습니다. |
| 3 | Signal Setting | 각 port 에 설정한 옵션입니다. 설정할 수 있는 옵션은 다음과 같습니다. Not Used |
| 4 | Save | 입력한 설정을 저장할 수 있습니다. |
Safety Stop Modes
안전 정지의 종류에 대해 배우고 안전 정지 및 해제 방법에 대해 배웁니다.
안전 정지 종류
사용자의 안전을 위해 제공되는 정지 모드는 다음과 같습니다.
STO (Safe Torque Off): 서보 오프 정지 (모터 전원을 즉시 Off)
SS1 (Safe Stop 1): 최대감속정지 후 서보오프
SS2 (Safe Stop 2): 최대감속정지 후 대기 (일시정지)
RS1: 충돌 후 외력 반대 방향으로 순응한 후 대기(Collision Detection / TCP force Limit Violation에서만 설정 가능)
두산 로봇은 두 가지 안전 정지 기능을 갖고 있습니다. 비상 정지는 일반적인 비상 상황에 정지하는 용도로 사용되고 해제한 후 서보 온하여 로봇을 재 구동 시킬 수 있습니다. 보호 정지의 경우 보호 정지의 원인이 되는 위반 사항을 해결한 이후에 정지를 해제하고 로봇을 재 구동할 수 있습니다.
비상 정지(Emergency Stop): 티치펜던트의 비상 정지 버튼 또는 추가적으로 설치된 외부 장치가 작동하였을 때의 정지 모드를 설정
티치펜던트의 비상 정지 스위치 또는 TBSFT의 EM단자에 연결된 비상 정지 스위치가 눌린 경우에 발생합니다.
STO 또는 SS1만 선택할 수 있습니다.
보호 정지(Protective Stop): 외부에 연결된 보호 장비를 작동하였을 때의 정지 모드를 설정
TBSFT의 PR단자에 연결된 보호 장치가 가동된 경우에 발생합니다.
안전 정지 기능에 관한 자세한 내용은 안전기능을 참조하십시오.
안전 정지/해제 방법
티치펜던트에 부착된 비상 정지 버튼을 누르거나 Safety I/O에 연결한 안전 장치를 통해 로봇을 비상 정지할 수 있습니다. 티치펜던트 화면에서 Robot Parameters > Safety Settings > Safety I/O 기능을 활용하여 안전 장치를 비상 정지 또는 보호 정지로 연결할 수 있습니다.
안전 장치를 Safety I/O에 연결하기 위한 방법은 컨트롤러 I/O 연결을 참고하십시오.
프로그램에서 해당 연결에 대한 안전 정지 기능을 설정하는 방법은 안전 신호 입출력(Safety I/O)을 참고하십시오.
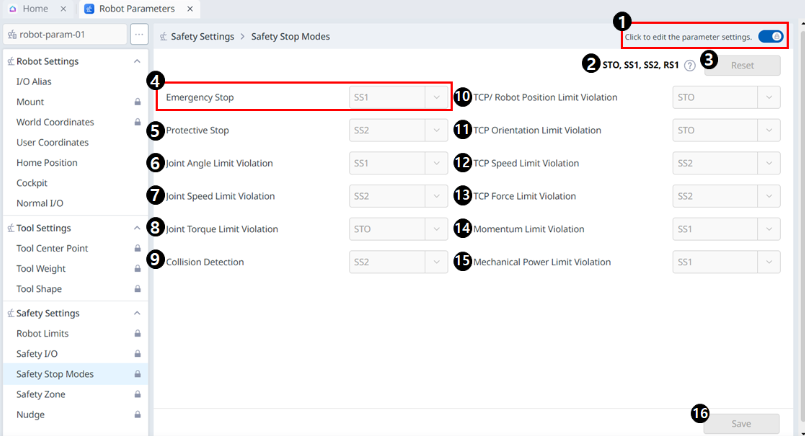
메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | Lock 토글 버튼 | 설정된 값이 잠금 상태 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
| 2 | Information message | 설정을 위해 필요한 정보가 있는 메시지 입니다. |
| 3 | Reset | 설정의 초기화를 위한 버튼입니다. |
| 4 | Emergency Stop | 해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다음과 같습니다. STO SS1 |
| 5 | Protective Stop | 해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다음과 같습니다. SS1 SS2 |
| 6 | Joint Angle Limit Violation | 해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다음과 같습니다. STO SS1 SS2 |
| 7 | Joint Speed Limit Violation | 해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다음과 같습니다. STO (H/P 시리즈 제외) SS1 SS2 |
| 8 | Joint Torque Limit Violation | STO만 가능합니다. |
| 9 | Collision Detection | 해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다음과 같습니다. STO (H/P 시리즈 제외) SS1 SS2 RS1 |
| 10 | TCP Robot Position Limit Violation | 해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다음과 같습니다. STO SS1 SS2 |
| 11 | TCP Orientation Limit Violation | 해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다음과 같습니다. STO (H/P 시리즈 제외) SS1 SS2 |
| 12 | TCP Speed Limit Violation | 해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. STO (H/P 시리즈 제외) SS1 SS2 |
| 13 | TCP Force Limit Violation | 해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다음과 같습니다. STO (H/P 시리즈 제외) SS1 SS2 |
| 14 | Momentum Limit Violation | 해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다음과 같습니다. STO (H/P 시리즈 제외) SS1 SS2 |
| 15 | Mechanical Limit Violation | 해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다음과 같습니다. STO (H/P 시리즈 제외) SS1 SS2 |
| 16 | Save | 설정 값들을 저장할 수 있습니다. |
알아두기
Information 메시지에는 다음과 같은 팝업이 뜹니다.