
측정 방법 및 조건
정지거리는 정지신호의 발생부터 모든 매니퓰레이터 동작이 정지상태에 도달할때까지 이동한 각도입니다.
정지시간은 정지신호의 발생부터 모든 매니퓰레이터 동작이 정지상태에 도달할때까지 흐른 시간입니다.
정지거리, 정지시간 데이터는 이동거리가 가장 큰 조인트 1, 조인트 2, 조인트 3에 대해 제공됩니다.
중첩된 축의 움직임은 긴 정지거리를 초래할 수 있습니다.
정지거리, 정지시간 데이터는 KS B ISO 10218-1:2011의 선언 및 인증에 따릅니다.
정지 분류 (Stop Category)
Stop Category | 설명 | |
|---|---|---|
| 1 | 정지분류 0(Stop Category 0) | 조인트 1 (base), 조인트 2 (shoulder), 조인트 3 (elbow)의 정지거리와 시간은 최대속도, 최대 뻗음정도, 최대 부하일 때 측정되었습니다. 조인트 2와 조인트 3은 축이 평행하기 때문에 어느 한쪽의 강제정지에 의한 충격이 다른쪽의 slip을 유발할 수 있습니다. 이 각도 편차도 함께 측정이 되었습니다. |
| 2 | 정지분류 1(Stop Category 1) | 조인트 1 (base), 조인트 2 (shoulder)의 정지거리와 정지시간은 속도, 뻗음정도, 부하 각각이 최대치의 33%, 66%, 100%일 때 측정되었습니다. 조인트 3 (elbow)의 정지거리와 정지시간은 속도와 부하 각각이 최대치의 33%, 66%, 100% 일 때 측정되었습니다. 조인트 3의 측정시 뻗음정도는 lower arm 길이와 완전히 편 wrist에 의해 최대치로 고정된 상태로 측정되었습니다. |
측정 포즈 및 조건
조인트 1의 측정은 회전축이 지면과 수직한 상태로, 수평방향의 움직임 중에 측정되었습니다.
조인트 2와 조인트 3의 측정은 회전축이 지면과 평행한 상태로, 로봇이 지면과 수직한 경로를 따라 아래 방향으로 움직이는 도중 정지시켜서 측정되었습니다.
알아두기
이 측정값들은 최악의 조건에서 측정한 결과입니다. 측정 상황에 따라 달라질 수 있습니다.
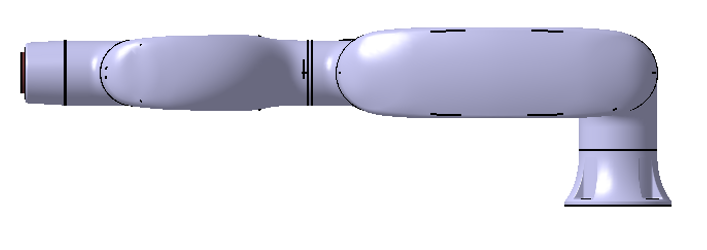
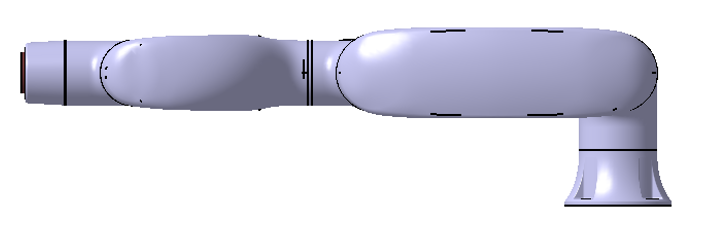
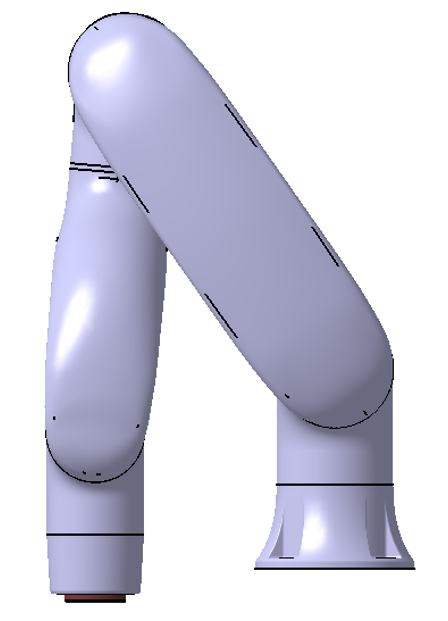
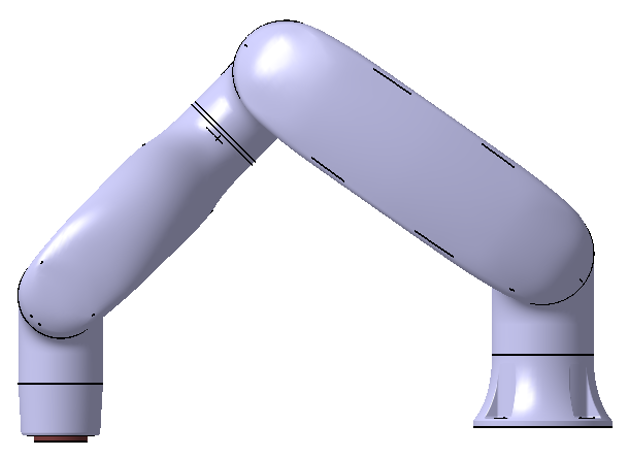
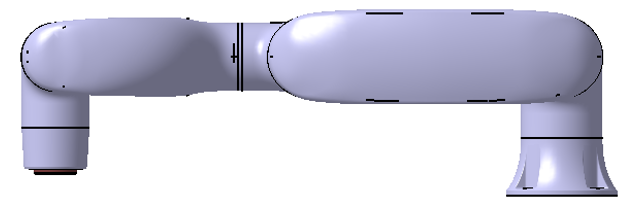
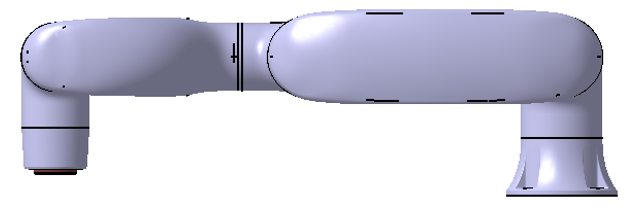
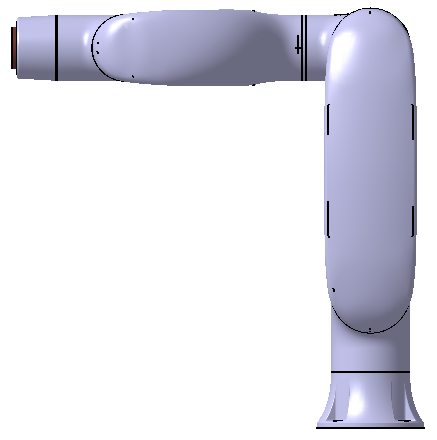
The pose for 33%, 66%, and 100% of extension
| Joint 1 | Joint 2 | Joint 3 |
100% extension Stop category 0 |
 |
 |
 |
33% extension Stop category 1 |
 |
 |
- |
66% extension Stop category 1 |
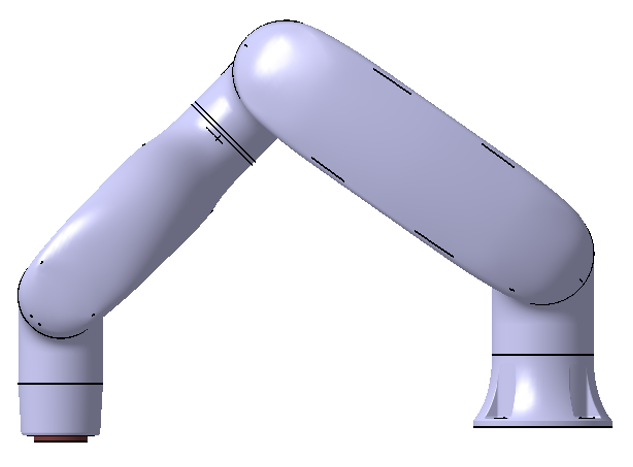 |
 |
- |
100% extension Stop category 1 |
 |
 |
 |
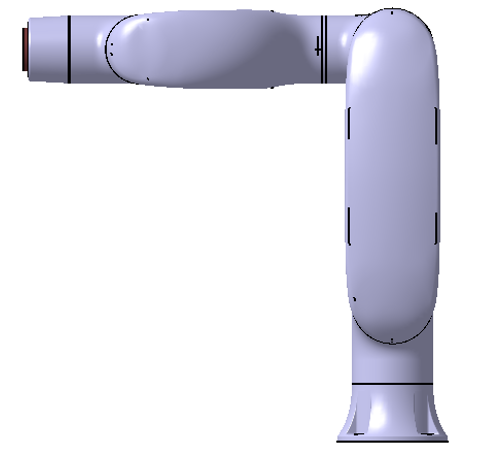
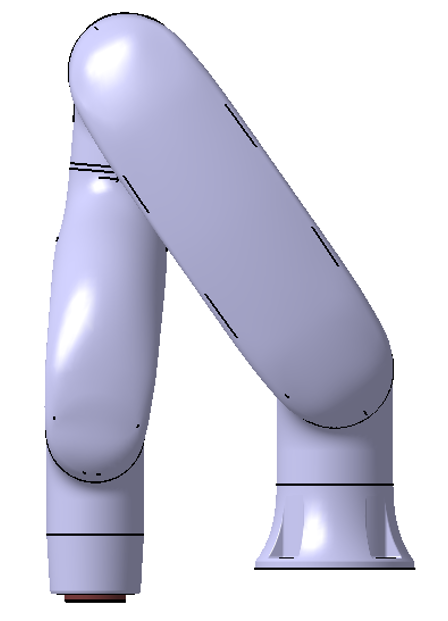
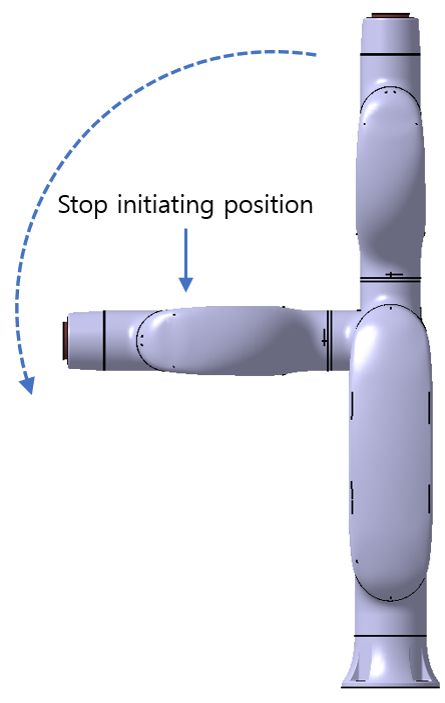
The pose when the stop is initiated and the measured angle (θd)
Pose when the stop is initiated | Measured Angle | |
Joint1 |
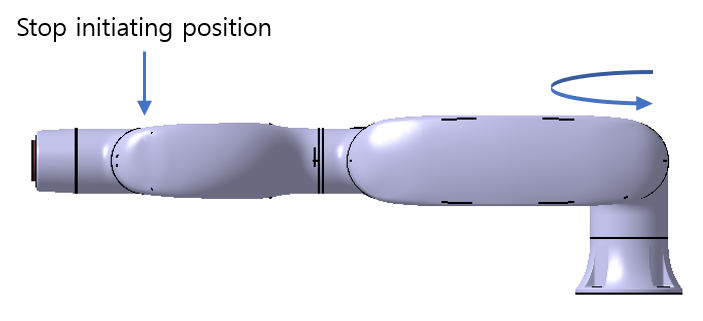 | No slip,
|
Joint2 |
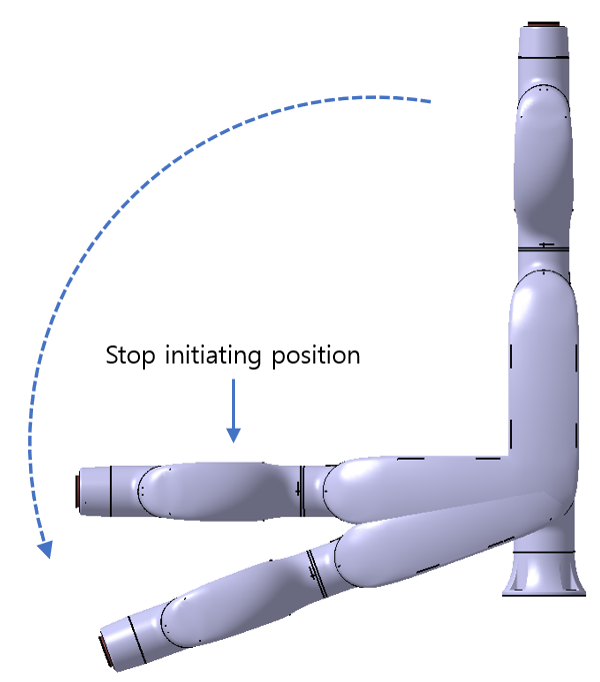 |
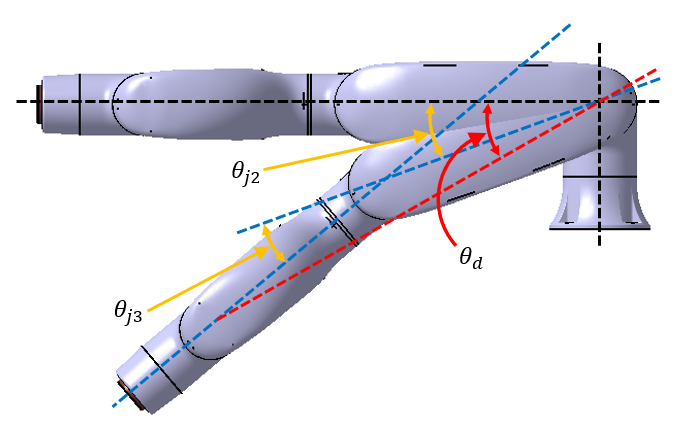 |
Joint3 |
 |
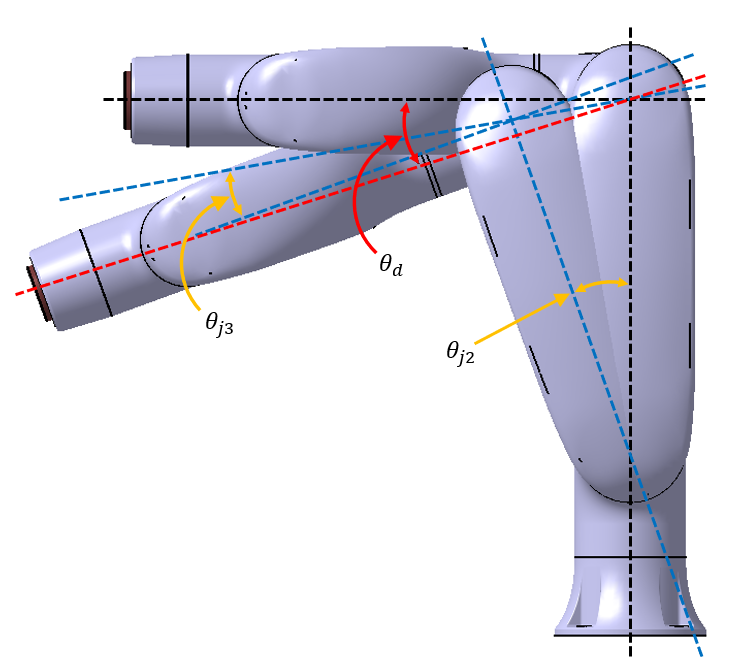 |