외부 장치 연결
외부 장치 연결 - 비전센서
로봇과 비전센서(물체위치 측정용 2D 카메라)를 연결하여 사용할 수 있으며, 네트워크를 통해 비전 센서 측정결과를 로봇에게 전달하여 로봇의 작업명령과 연동할 수 있습니다.
비전센서 설정
통신 연결 설정
네트워크를 통해 비전센서의 측정데이터를 로봇에 전달하기 위하여 장치 간의 LAN 포트를 연결한 후 TCP/IP 통신을 사용합니다. (네트워크 연결 참고) TCP/IP 통신 연결을 위하여 비전센서의 IP 주소를 192.168.137.xxx 대역으로 설정해야 합니다.
비전작업 설정
비전센서를 이용하여 물체위치를 측정하기 위해서는 측정 대상물체에 대한 이미지 입력 및 비전 티칭작업이 필요합니다. 비전작업 설정은 비전센서 제조사에서 제공하는 전용의 설정프로그램을 이용하여 실시합니다.
측정데이터 포맷 설정
비전센서의 측정 데이터를 로봇 작업에 사용하기 위해서는 비전-로봇 좌표계 캘리브레이션이 필요하며, 해당 기능은 비전 센서 전용 설정프로그램에서 사전에 수행되어야 합니다. 비전센서의 측정데이터 포맷은 아래와 같이 설정하여, 로봇에게 전달해야 합니다.
포맷 | pos | , | x | , | y | , | angle | , | var1 | , | var2 | , | … |
|---|
pos: 측정데이터의 시작 구분자 (prefix)
x: 비전센서로 측정한 물체의 X 좌표값
y: 비전센서로 측정한 물체의 Y 좌표값
angle: 비전센서로 측정한 물체의 회전 각도값
var1…varN: 비전센서로 측정한 물체의 임의 정보 (예. 물체 치수값 / 불량 검사값)
예시) pos,254.5,-38.1,45.3,1,50.1 (설명: x=254.5, y=-38.1, angle=145.3, var1=1, var2=50.1)
로봇 프로그램 설정
비전센서와 로봇 간의 물리적 통신 연결과 비전센서 자체의 설정 작업이 완료되면, 비전센서와 연동 작업이 가능하도록 로봇 프로그램을 설정해야 합니다. DRL(Doosan Robot Language)의 외부비전센서 기능을 이용하여 비전센서의 연결/통신/제어가 가능하며, 티치펜던트의 태스크 빌더 및 라이터에서 해당 기능을 활용하여 프로그램을 구성할 수 있습니다.
DRL(Doosan Robot Language)의 외부 비전센서 기능에 대한 상세한 내용과 통합예제 등은 Programming manual에서 확인 가능합니다.
외부 장치 연결 – DART Platform
DART Platform는 Windows OS 기반의 Desktop이나 Laptop 위에서 실행되는 소프트웨어입니다. 컨트롤러와 Desktop/Laptop을 LAN Port를 통해 연결한 후, DART Platform를 실행하게 되면, 티치펜던트의 기능을 모두 이용할 수 있습니다. 이 때, 컨트롤러 내 하위 제어기와의 연결을 위해 아래와 같은 설정 과정이 필요합니다.
IP Address 검색 및 연결 설정
통신 연결 설정
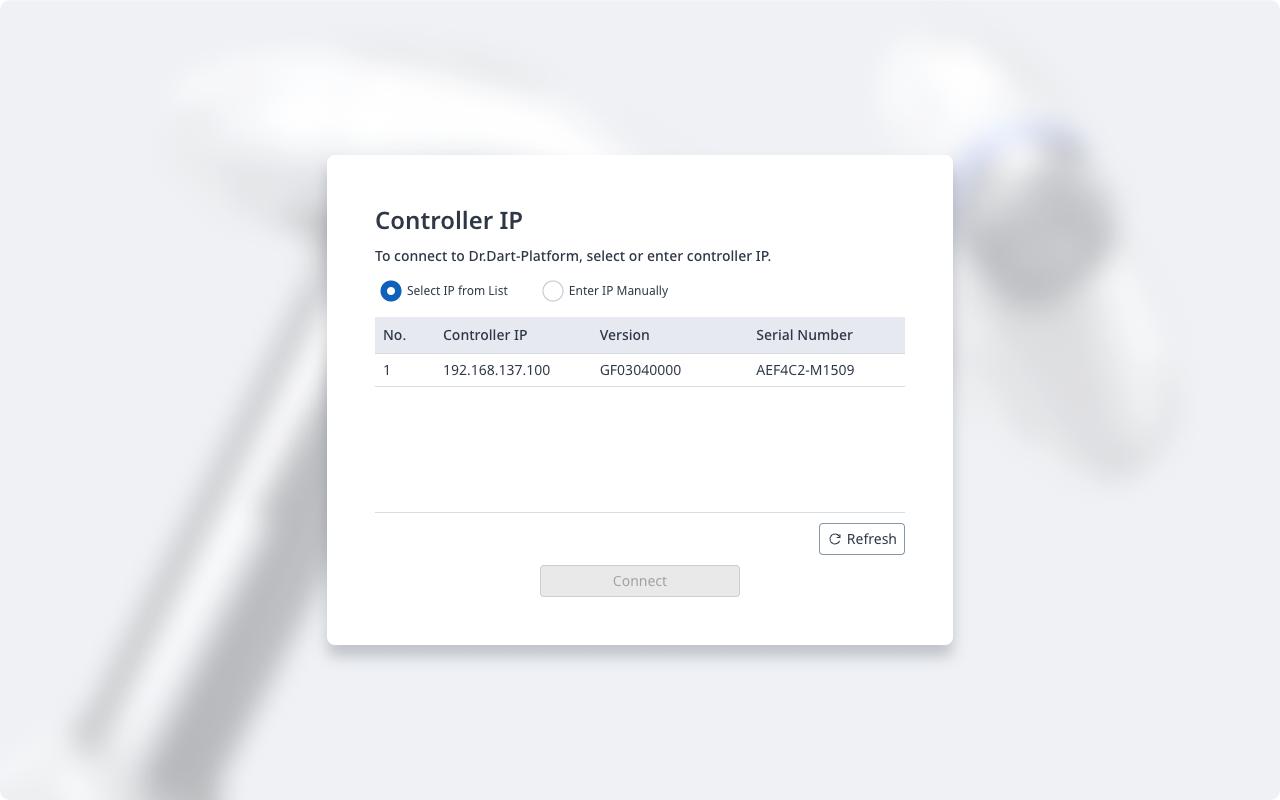
Laptop을 컨트롤러의 LAN포트에 연결 후 DART Platform을 실행하면, 연결을 위한 컨트롤러 IP주소, 하위제어기의 버전 정보 및 로봇 시리얼 번호를 자동 검색하게 됩니다.
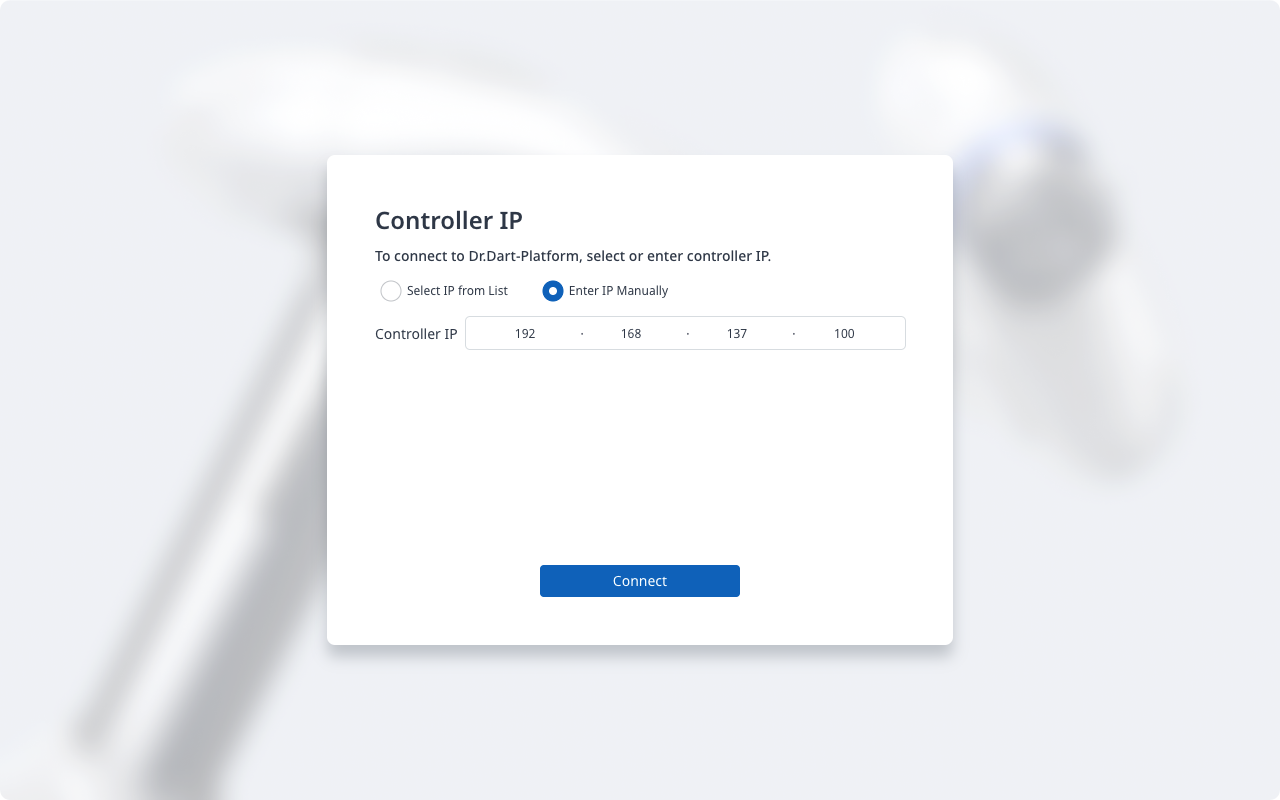
검색이 안될 경우, Refresh 버튼을 눌러 새로 고침하거나 Enter IP Manually 를 탭하여 직접 제어기의 IP를 입력하실 수 있습니다.
연결하고자 하는 로봇의 시리얼 번호를 선택하고 연결 버튼을 누르면 DART Platform 과 하위제어기가 연결이 이루어지게 되고, 정상적으로 로봇 사용이 가능하게 됩니다.
연결에 문제가 있을 경우 하기 내용을 따라해 보시고 그래도 연결이 되지 않는 경우 영업 또는 서비스 담당자쪽으로 문의하시길 바랍니다.
연결 가능한 컨트롤러 IP 주소, 하위제어기 버전 정보 및 로봇 시리얼 번호 검색 결과가 보이지 않는 경우에는 새로 고침 버튼을 눌러 재검색 후 위 내용에 따라 연결을 진행해 보시길 바랍니다.
이후 아래와 같은 제어권 이동 페이지가 나오면 강제 회수 버튼을 탭하여 Platform과 연결을 시행할 수 있습니다.