로봇이란
로봇 각 시리즈 별 기능 제한
로봇의 시리즈(A, As, E, M/H, P Series) 별로 아래 기능들을 사용하는데 제한이 있습니다.
전류 기반: 각 관절에 위치한 모터 전류 이용합니다.
FTS 기반: 로봇 끝단에 위치한 FTS(Force Torque Sensor)를 이용합니다.
JTS 기반: 각 관절에 위치한 JTS(Joint Torque Sensor)를 이용합니다.
기능 | A/E 시리즈 (전류 기반) | A 시리즈S (전류, FTS 기반) | M 시리즈 (JTS 기반) | H 시리즈 (JTS 기반) | P 시리즈 (JTS 기반) |
|---|---|---|---|---|---|
직접교시
| O | O(전류 기반) | O | O | O |
직접교시
| X | O(FTS 기반) | O | O | O |
충돌 감지 | O | O(전류 기반) | O | O | O |
설치 자세 측정 | X | O(FTS 기반) | O | X(바닥에만 설치 가능) | X(바닥에만 설치 가능) |
Tool 무게 측정 | X | O(FTS 기반) | O | O | O |
Workpiece 무게 측정 | X | O(FTS 기반) | O | O | O |
Nudge 기능 | X | X | O | O | O |
힘 제어 | O (Rotation 제외하고 Translation 3방향만 설정 가능) | O(FTS 기반) | O | O | O |
컴플라이언스 제어 | O (Rotation 제외하고 Translation 3방향만 설정 가능) | O(FTS 기반) | O | O | O |
로봇 시리즈 별 힘 모니터링 기능 제한
티치 펜던트와 DART-Studio에서 힘 데이터를 모니티링할 수 있습니다. 또한, DRL 명령어 (check_force_condition())를 사용하여 외부에서도 힘 데이터를 모니터링할 수 있습니다.
팔레타이징(Palletizing) 모드가 ‘ON’인 경우: H, P시리즈를 제외한 모든 시리즈에서 제어/모니터링 기능이 ‘OFF’ 상태와 동일하게 제공합니다.
기능 | A/E 시리즈 (전류 기반) | A 시리즈S (전류, FTS 기반) | M 시리즈 (JTS 기반) | H 시리즈 (JTS 기반) | P 시리즈 (JTS 기반) |
|---|---|---|---|---|---|
힘 제어 | O (Rotation 제외하고 Translation 3방향만 설정 가능) | O (FTS 기반) | O | O | O |
O (팔레타이징 모드 ON의 경우: 힘제어 output제한 (Base Rx, Ry orientation)) | O (팔레타이징 모드 ON의 경우: 힘제어 output제한 (Base Rx, Ry orientation)) | ||||
컴플라이언스 제어 | O (Rotation 제외하고 Translation 3방향만 설정 가능) | O (FTS 기반) | O | O | O |
O (팔레타이징 모드 ON의 경우: 컴플라이언스 제어 output제한(Base Rx, Ry orientation)) | O (팔레타이징 모드 ON의 경우: 컴플라이언스 제어 output제한(Base Rx, Ry orientation)) | ||||
힘 모니터링 (티치 펜던트) | X | O (FTS 기반) | O (특이점 구간 힘 값 '0'으로 표시) | O (특이점 구간 힘 값 '0'으로 표시) | O (특이점 구간 힘 값 '0'으로 표시) |
O (팔레타이징 모드 ON의 경우: Base 기준 4자유도(x, y, z, Rz) 제공)) | O (팔레타이징 모드 ON의 경우: Base 기준 4자유도(x, y, z, Rz) 제공)) | ||||
힘 모니터링 (DART-Studio) | O (특이점 구간 힘 값 '0'으로 표시) | O (FTS 기반) | O (특이점 구간 힘 값 '0'으로 표시) | O (특이점 구간 힘 값 '0'으로 표시) | O (특이점 구간 힘 값 '0'으로 표시) |
O (팔레타이징 모드 ON의 경우: Base 기준 4자유도(x, y, z, Rz) 제공)) | O (팔레타이징 모드 ON의 경우: Base 기준 4자유도(x, y, z, Rz) 제공)) | ||||
힘 모니터링 (DRL 명령어 사용시: | O (특이점 구간 힘 값 '0'으로 표시) | O (FTS 기반) | O (특이점 구간 힘 값 '0'으로 표시) | O (특이점 구간 힘 값 '0'으로 표시) | O (특이점 구간 힘 값 '0'으로 표시) |
O (팔레타이징 모드 ON의 경우: Base 기준 4자유도(x, y, z, Rz) 제공)) | O (팔레타이징 모드 ON의 경우: Base 기준 4자유도(x, y, z, Rz) 제공)) |
제어 output 제한 (Base Rx, Ry orientation): Base Rx, Ry orientation에 해당하는 힘 또는 컴플라이언스 제어 값이 출력되지 않습니다. 해당 축(Base Rx, Ry)의 힘 또는 컴플라인어스 제어 값을 입력하더라도 ‘0’으로 무시됩니다.
특이점(Singularity) 알아보기
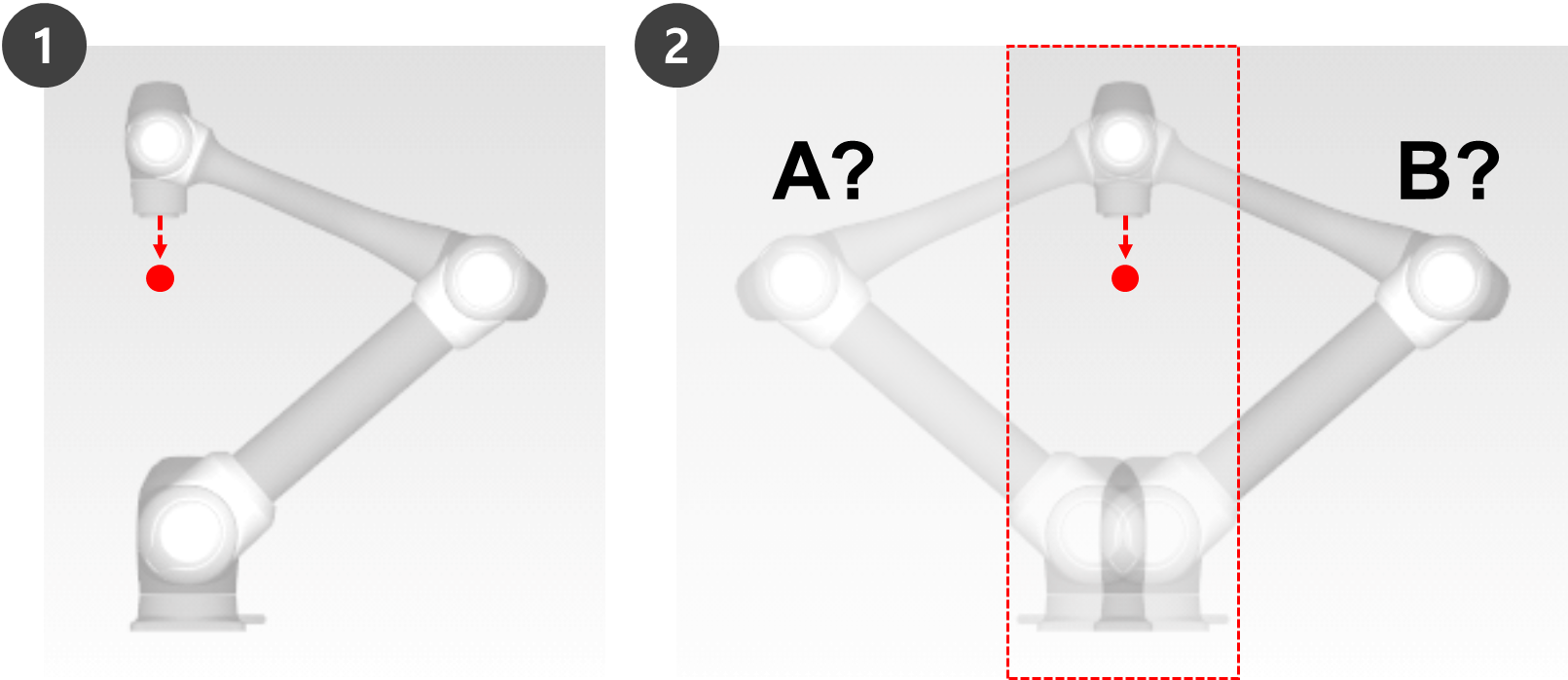
다관절 로봇에서 특이점(Singularity)란 간단하게 설명하면 로봇이 이동 중 자신의 다음 자세를 계산하기 어려워하는 위치(또는 점)입니다. 다관절 로봇의 경우 로봇의 끝단을 기준으로 이동하는 동안의 각 관절의 각도를 계산합니다.
예를 들면 아래 그림 1의 상태에서 로봇이 빨간 점으로 이동하고자 할 때, 로봇은 그림 2처럼 다음 자세를 A 자세가 되도록 각 관절을 움직여야 하는 건지 B 자세로 움직여야 하는 건지 판단을 할 수가 없는 상태가 됩니다. 이 위치(또는 점)를 특이점이라고 합니다.
특이점 근처에서는 로봇의 움직임이 평면, 점, 직선에 해당하여 움직임이 원활하지 않고 로봇 끝단의 직선 이동이 유지되지 않을 수 있으며 제어 시 위치 오차가 증가할 수 있습니다. 로봇 관절이 일직선인 경우를 포함하여 그림에서 보는 것과 같이 3가지 경우에 특이점이 발생합니다.
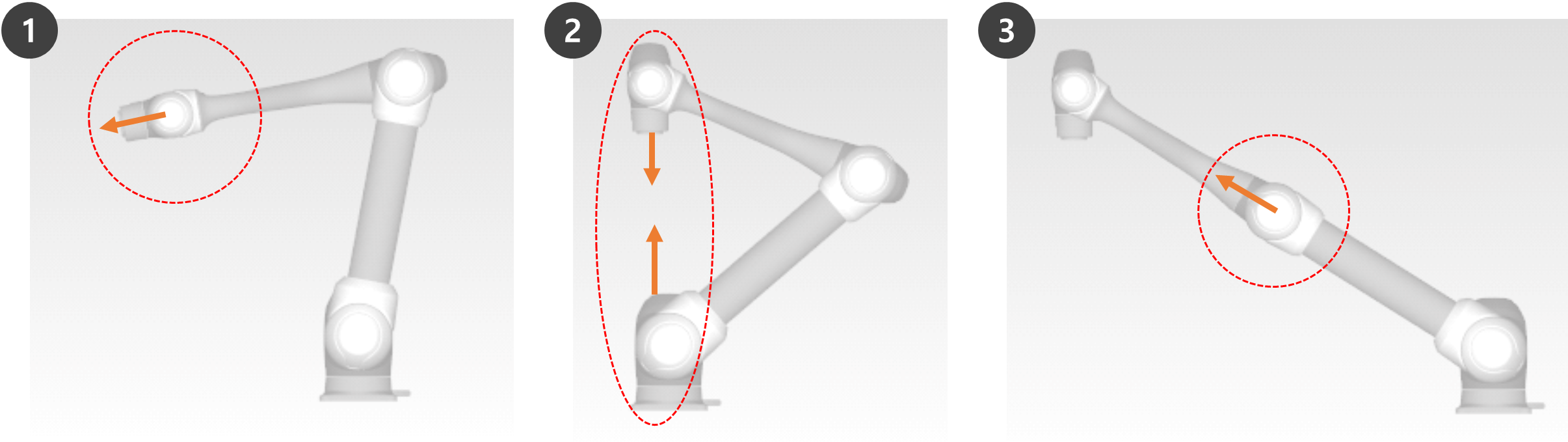
손목 특이점(Wrist Singularity) : 5번 축이 0º에 근접하여 로봇의 손목 부분이 일직선이 되는 경우
4, 5, 6번 축은 다관절 로봇을 사람의 팔에 비유했을 때 손목 관절에 해당됩니다.
어깨 특이점(Shoulder Singularity) : 1번 축과 6번 축이 동일 선상에 있는 경우
1, 2번 축은 다관절 로봇을 사람의 팔에 비유했을 때 어깨 관절에 해당됩니다.
팔꿈치 특이점(Elbow Singularity) : 3번 축이 0º에 근접하여 로봇이 일직선이 되는 경우
3번 축은 다관절 로봇을 사람의 팔에 비유했을 때 팔꿈치에 해당됩니다.
주의
관절 회전으로 이동하는 수동 및 자동 조작의 경우 특이점의 영향을 받지 않습니다.
태스크 이동, MoveL 명령어 등
특이점은 로봇의 끝단을 선형으로 이동하는 수동 및 자동 조작 작업 시에만 발생합니다.
조인트 이동, MoveJ 명령어 등
특이점 영역에서는 힘 제어나 순응 제어가 동작하지 않습니다.
선형 모션의 경로가 이 특이점을 경유할 때 특정 축의 회전 속도가 급격하게 빨라지기 때문에 조인트 속력 제한 위반(Joint Speed Limit Violation) 또는 조인트 각도 제한 위반(Joint Angle Limit Violation)으로 에러가 발생할 수 있습니다.
특이점 회피 방법
두산 로봇은 모션 제어시에 특이점을 회피하는 옵션을 제공하고 있습니다. 그러나 특이점 영역에서는 MoveJ 계열의 조인트 이동 명령어를 사용하여 예외 상황이 발생하지 않는 작업을 구성하는 것을 추천합니다.
두산 로봇에서 제공하는 특이점 회피 옵션은 다음과 같습니다.
자동 회피: 특이점을 회피하여 모션을 수행합니다. 단, 로봇 모션이 예상 경로와 다를 수 있습니다.
경로 우선: 경로와 속도를 지키지만 특이점 근처에서 에러 발생으로 정지할 수 있습니다.
속도 가변: 경로는 지키지만 특이점 근처에서 감속합니다.
오일러 각(Euler Angle) 알아보기
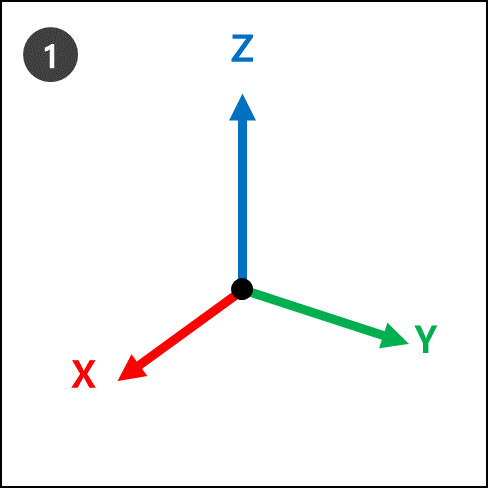
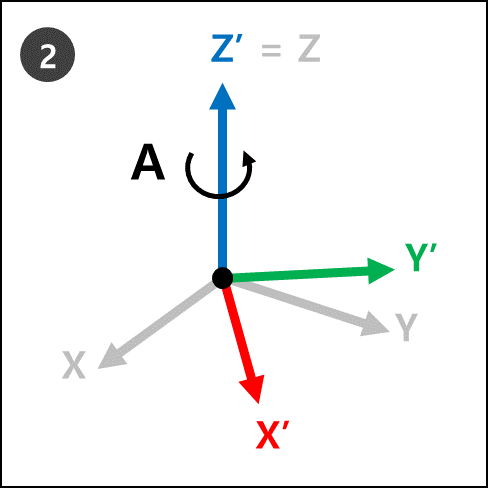
오일러 각(Euler Angle)이란 물체의 방향을 서로 수직인 X, Y, Z 축의 각도로 표현하는 방법 중 하나 입니다. 이때 A, B, C는 순차적인 회전 각도를 의미합니다. 로봇 브랜드 마다 이 A, B, C 회전의 순서를 Rz-Ry-Rz, Rz-Ry-Rx 그리고 Rx-Ry-Rz 등으로 다르게 정의합니다.
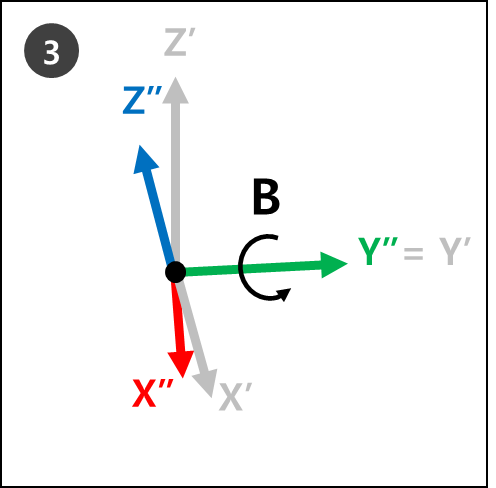
Rz-Ry-Rx를 예로 들면, Rz는 Z축에서의 회전(Rotation), Ry는 Y축에서의 회전(Rotation), Rx는 X축에서의 회전(Rotation)을 의미합니다. Rz로 A각도, Ry로 B각도 그리고 다시 Rx로 C각도를 순서대로 회전하면 물체의 현재 회전 방향을 나타낼 수 있습니다. 여기서 중요한 점은 최초로 기준 좌표계에서 Z축으로 회전한 이후부터는 새로운 좌표계를 기준으로 회전한다는 점입니다.
이를 1~4의 과정으로 시각화하여 설명할 수 있습니다.
 |
 |
 |
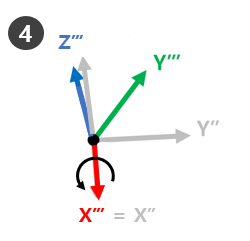 |
과정 4의 새 좌표계(Z''', Y''', X''')가 오일러 회전각 A, B, C를 적용했을 때 현재 로봇의 회전을 의미합니다.
이를 오른손으로 간단하게 시각화할 수 있습니다. 오른손을 다음과 같이 만드십시오. 이를 오른손의 법칙이라고 부르며 엄지(X축), 검지(Y축), 중지(Z축) 세 손가락이 서로 90도를 이루도록 만들면 서로 수직인 X, Y, Z 축의 좌표계와 동일해집니다.
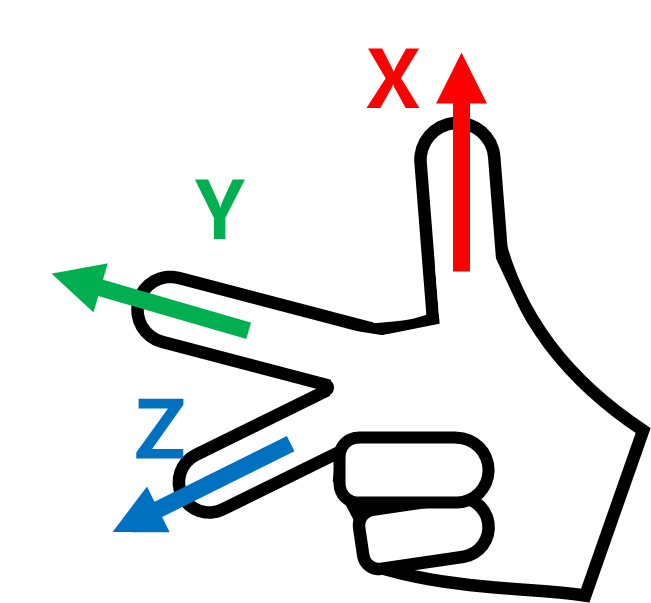
이제 오른손을 오른손 법칙 데카르트 자세로 만들고 Rz, Ry, Rx 순서대로 회전을 해보십시오.
Rz : 중지 손가락(Z축) 주위로 A각도를 회전 합니다.
Ry : 검지 손가락(Y축) 주위로 B각도를 회전 합니다.
Rx : 엄지 손가락(X축) 주위로 C각도를 회전 합니다.
알아두기
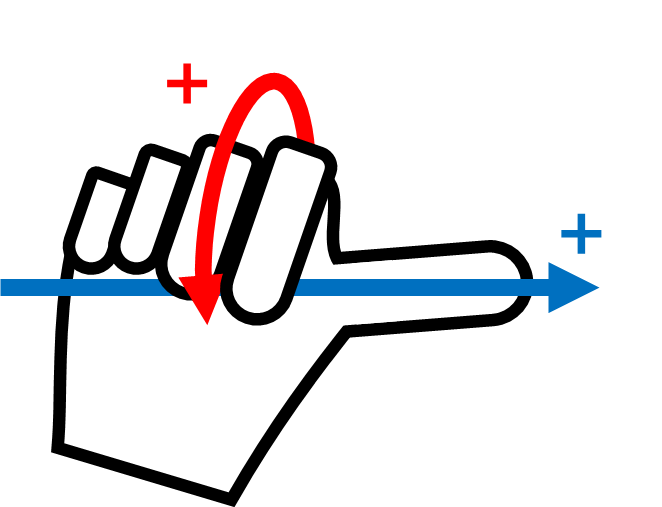
A, B, C의 회전 방향은 오른손의 엄지 손가락이 해당 축의 ‘+' 방향을 향하도록 놓고 주먹을 쥐었을 때 나머지 4개의 손가락이 가리키는 방향이 '+’ 회전 방향입니다. 이를 오른 나사의 법칙이라고 합니다.