초기 구동
컨트롤러 전원 켜기
MANDATORY EASY 1 MIN
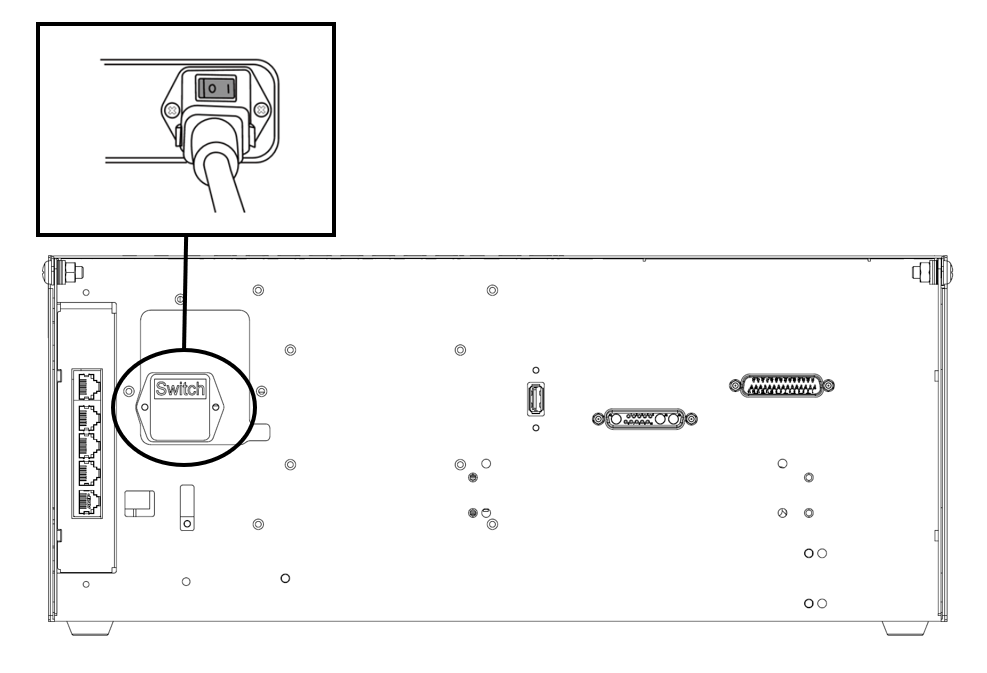
컨트롤러 하단에 있는 전원 스위치를 누르십시오. 로봇, 컨트롤러, 티치펜던트와 같은 시스템에 필요한 전원이 켜집니다.
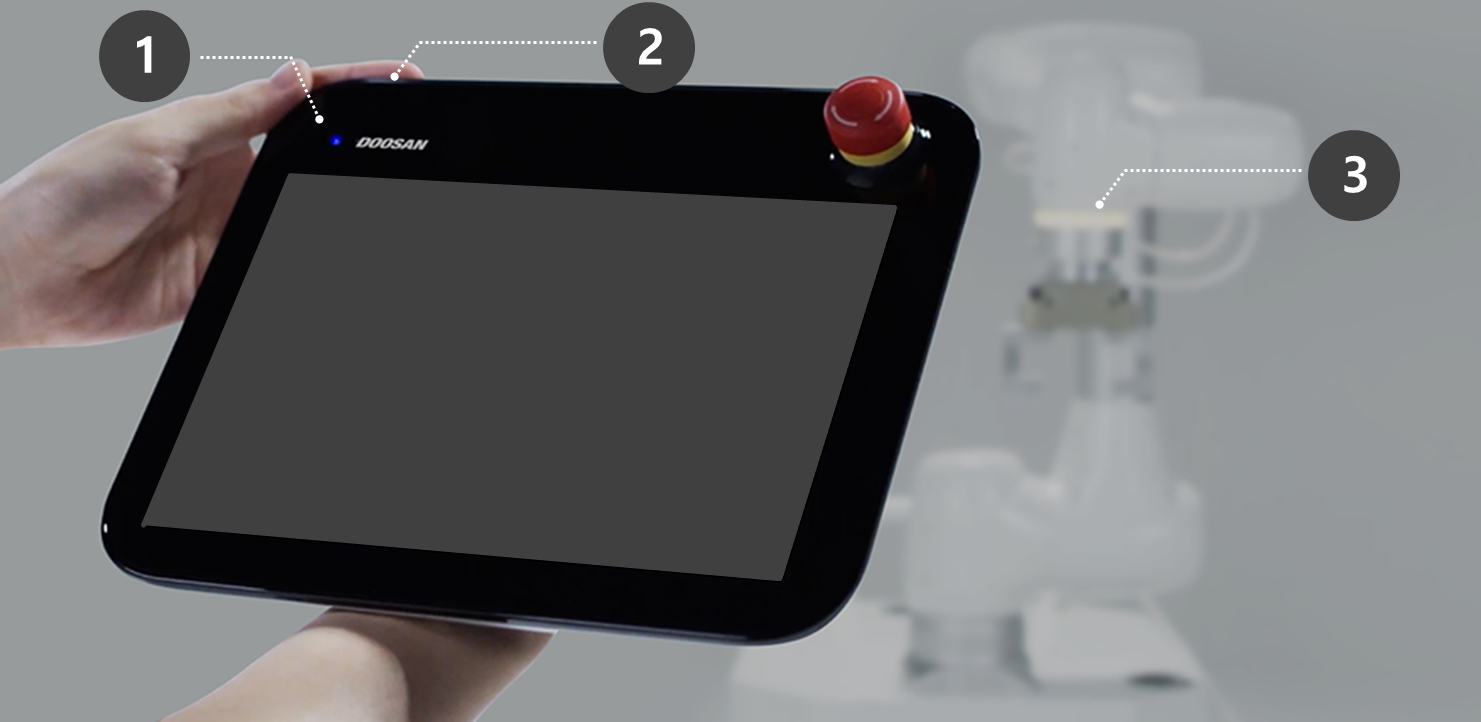
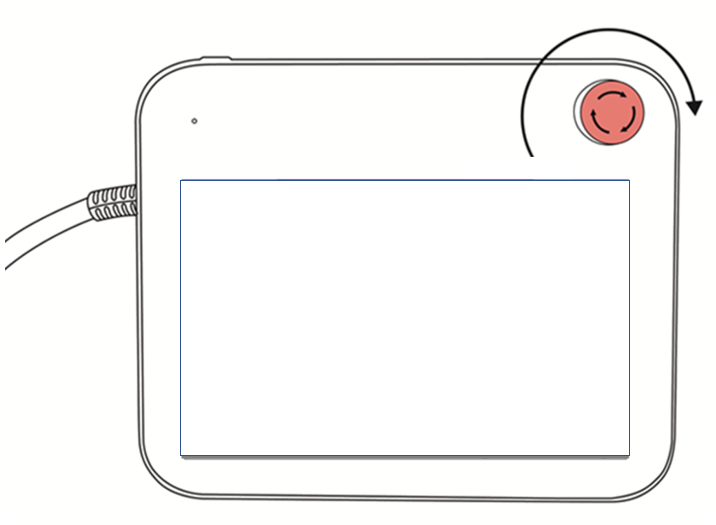
티치펜던트 화면이 켜질 때까지 전원 버튼(그림 2번)을 길게 누르십시오. 로봇 제어기와의 네트워크 연결이 완료될 때까지 티치펜던트 LED(그림 1번)와 플랜지 LED(그림 3번)는 빨간색으로 점멸됩니다.
ㅤ
ㅤ
티치펜던트 외 장비의 경우 시스템 전원 온/오프를 참조하십시오.
알아두기
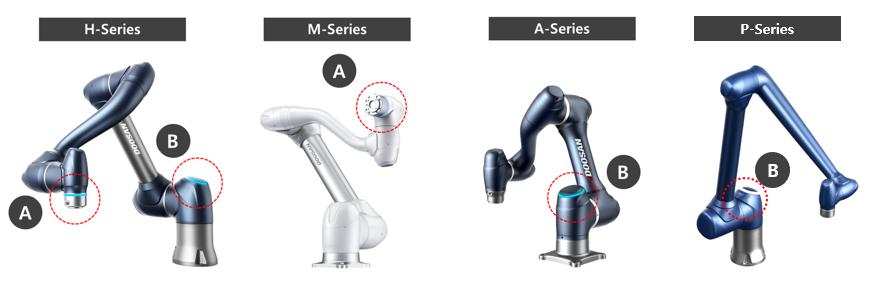
두산 로봇의 시리즈 별 LED 위치는 다음과 같습니다.
A : 플랜지 LED
B : 1축 LED
비상 정지 버튼 해제하기
MANDATORY EASY 1 MIN
로봇 설치 후 첫 부팅이 완료되면, 티치펜던트의 비상 정지 버튼이 눌려 있어 경고 팝업이 나타납니다. 이때, 비상 정지 버튼을 해제해야 로봇을 사용할 수 있습니다.
비상 정지 버튼을 시계 방향으로 돌려서 비상 정지 상태를 해제하십시오.
패키징 자세 해제하기
MANDATORY EASY 3 MIN
로봇은 운반이나 포장에 용이하도록 패키징 자세로 설정되어 있습니다. 로봇을 사용하려면 패키징 자세를 해제해야 합니다. 패키징 자세에서는 로봇이 로봇 각도 제한치(Joint Angle Limit)를 초과하는 자세를 유지하기 때문에 안전 제한치 위반으로 서보 온 상태로 전환하는 것이 불가능합니다. 이 때 로봇 LED는 빨간색으로 표시됩니다.
알아두기
로봇 사용 중 이송 등으로 로봇을 포장할 일이 생긴다면, 패키징 모드에서 패키징 자세 이동을 사용하여 패키지 자세로 변경하면 됩니다.
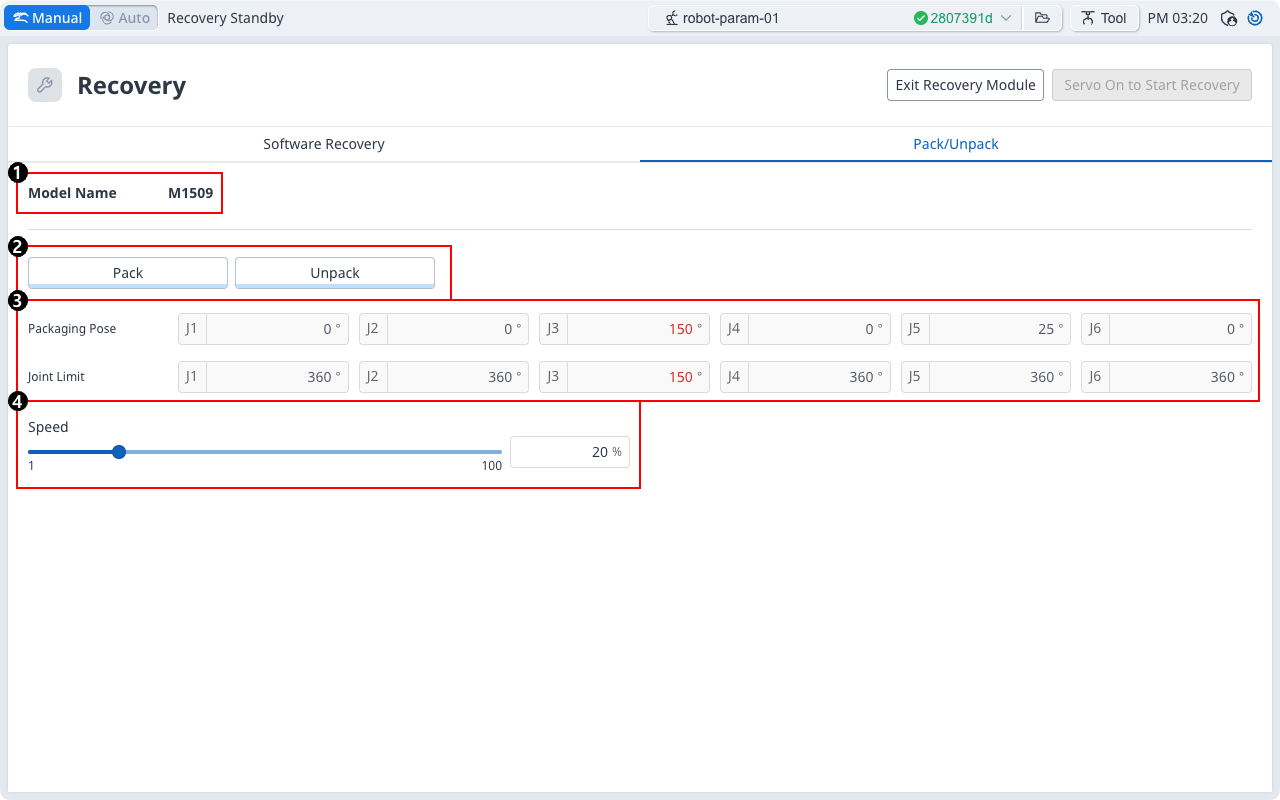
항목 | 설명 | |
|---|---|---|
| 1 | 모델 이름 | 연결된 로봇 모델의 이름이 나타납니다. |
| 2 | Pack/Unpack | Pack과 Unpack 중 하나를 선택할 수 있습니다. |
| 3 | Packaging Pose/Joint Limit | 자세 및 조인트 제한치 값이 나타납니다. |
| 4 | Speed Ratio | 팩 혹은 언팩 모드의 속력을 슬라이더 혹은 입력을 통해 조절할 수 있습니다. |
패키징 자세를 설정하는 방법은 다음과 같습니다.
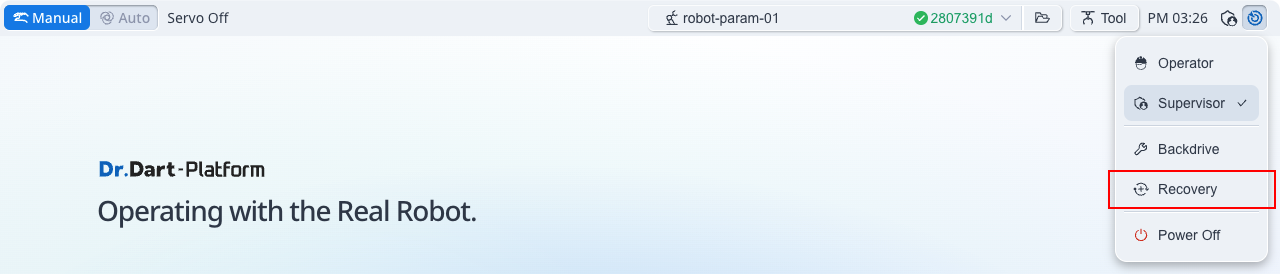
헤더 창에서 Recovery 메뉴를 탭 하십시오.
패키징 모드 탭을 선택하십시오.

Servo On to Start Recovery 버튼을 탭 해 패키징 모드를 활성화하십시오.

설정된 패키징 포즈로 로봇이 자동으로 이동합니다.
Pack 버튼으로 로봇을 팩 자세로 만들거나 Unpack 버튼으로 Default Home Position 을 만들 수 있습니다.
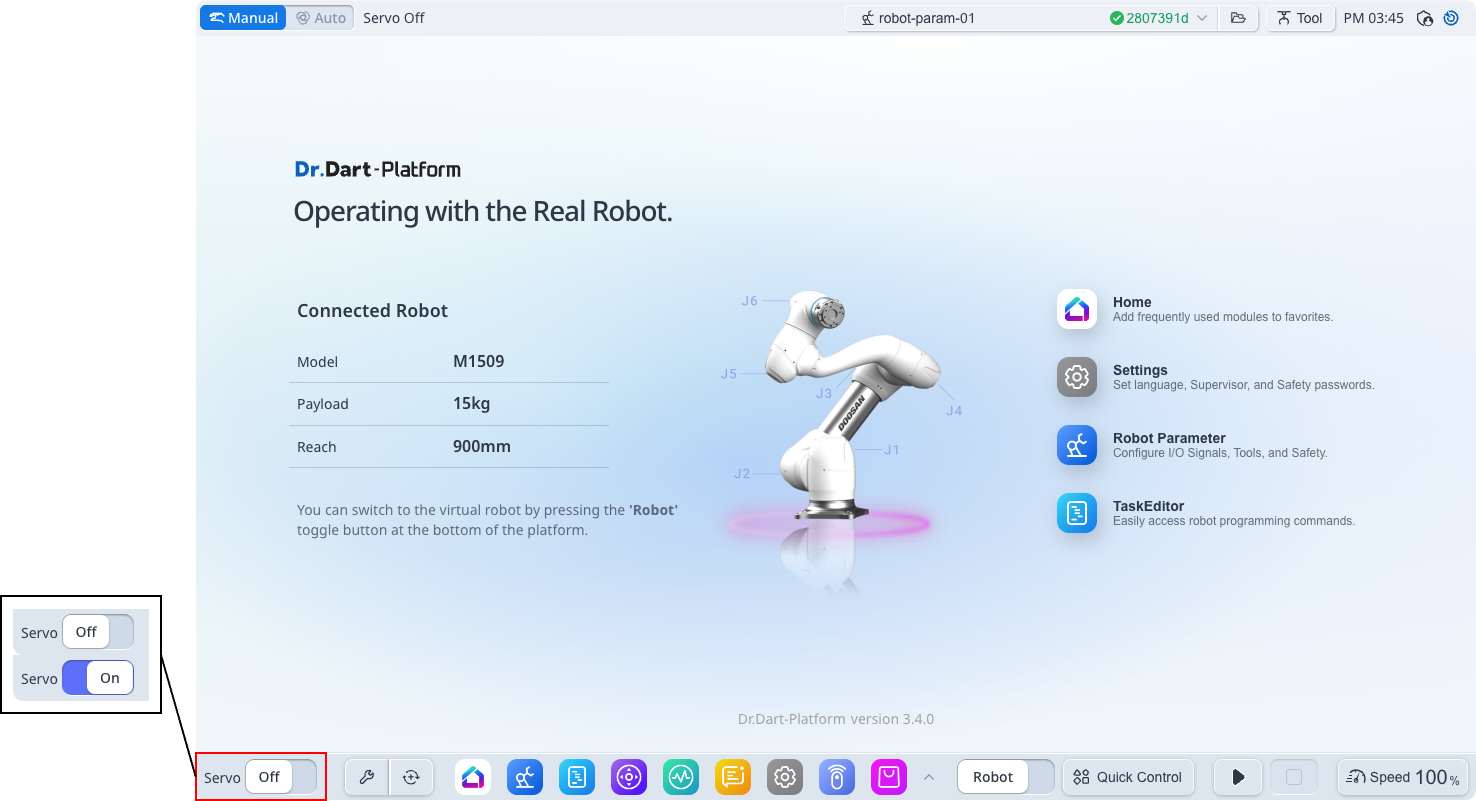
서보 오프 하기
MANDATORY EASY 1 MIN
서보 온 상태는 로봇의 자세를 이동하기 위해 로봇의 Joint에 전원이 공급되어 로봇이 준비된 상태를 말합니다.
로봇 조인트의 전원을 차단하여 로봇을 멈추기 위해 서보 오프 버튼을 누르십시오. 자세한 내용은 서보 온 알아보기를 참고하십시오.