
로봇의 사양
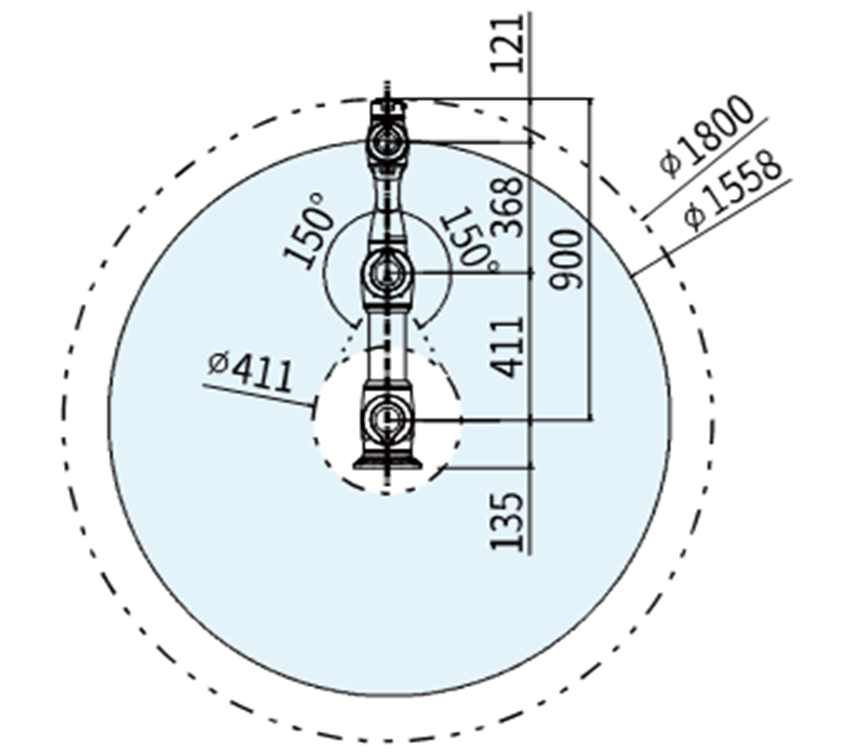
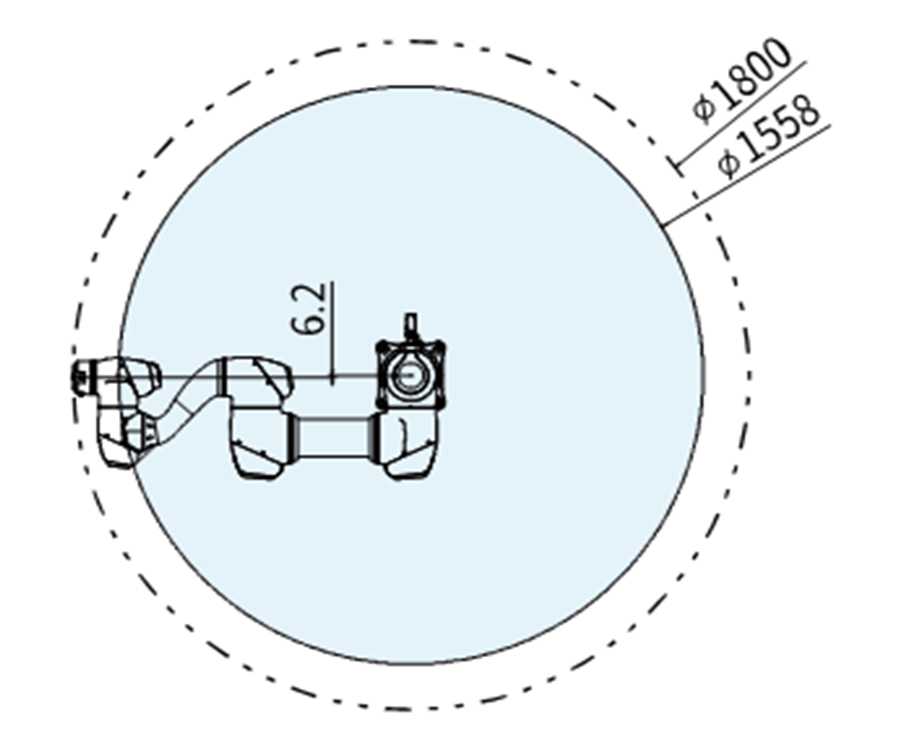
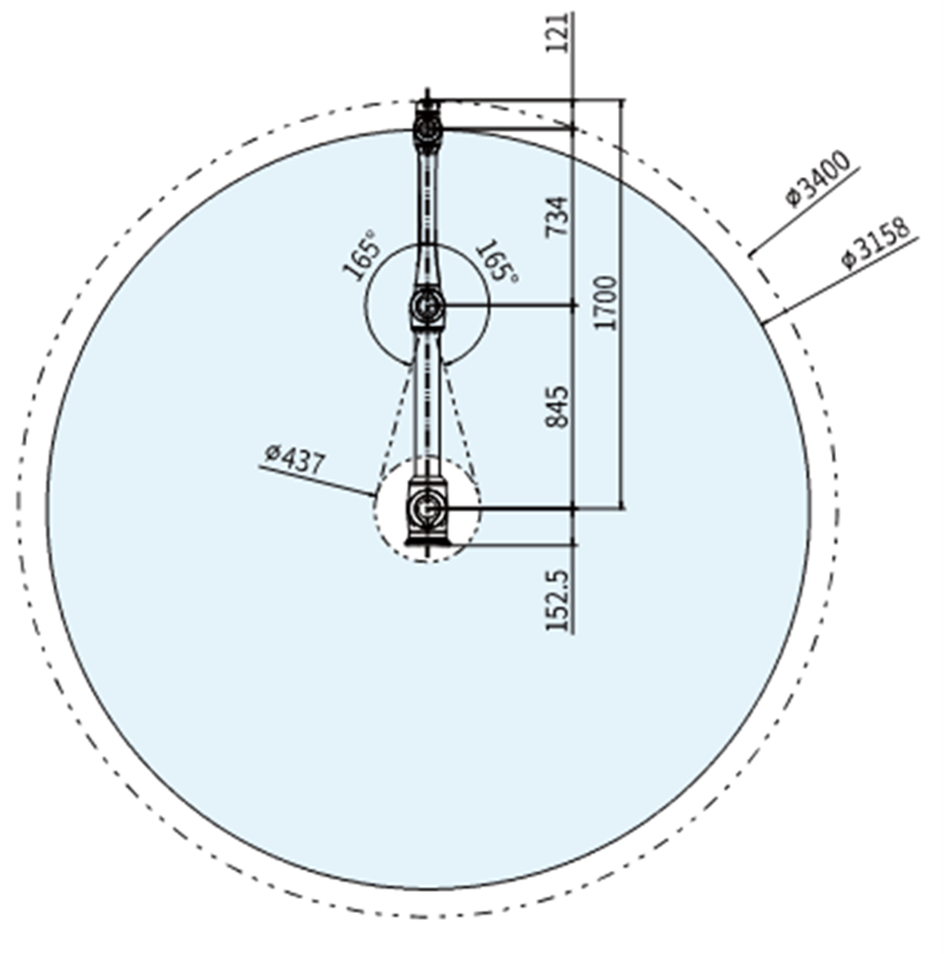
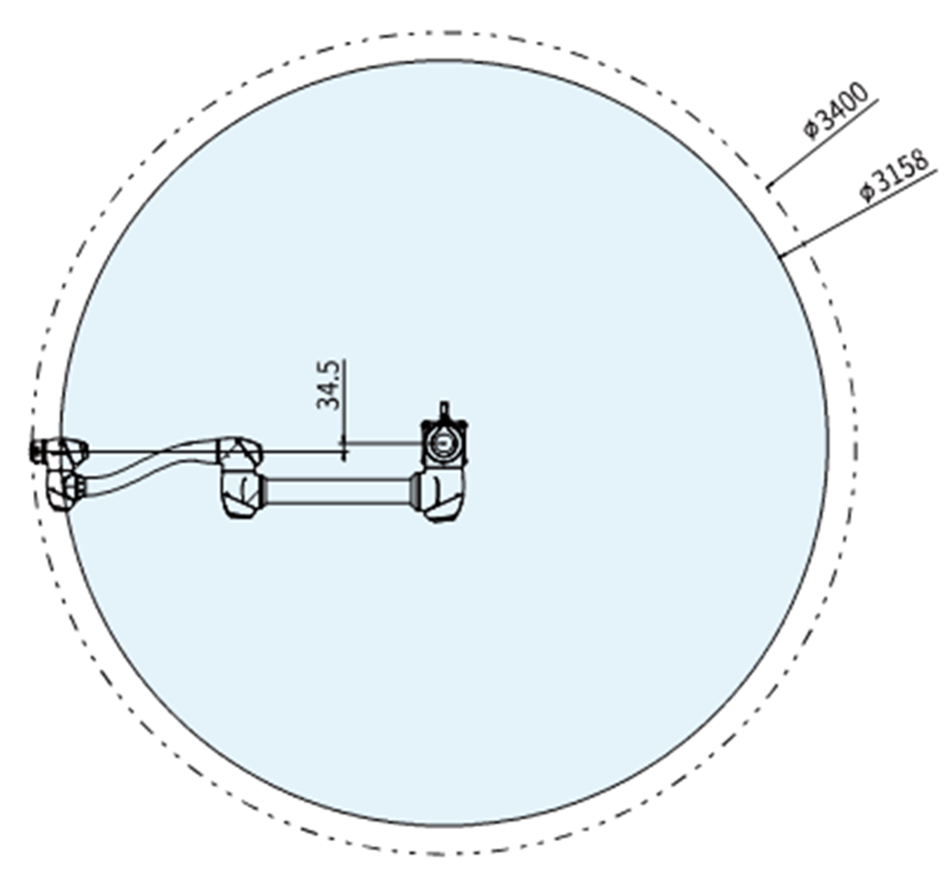
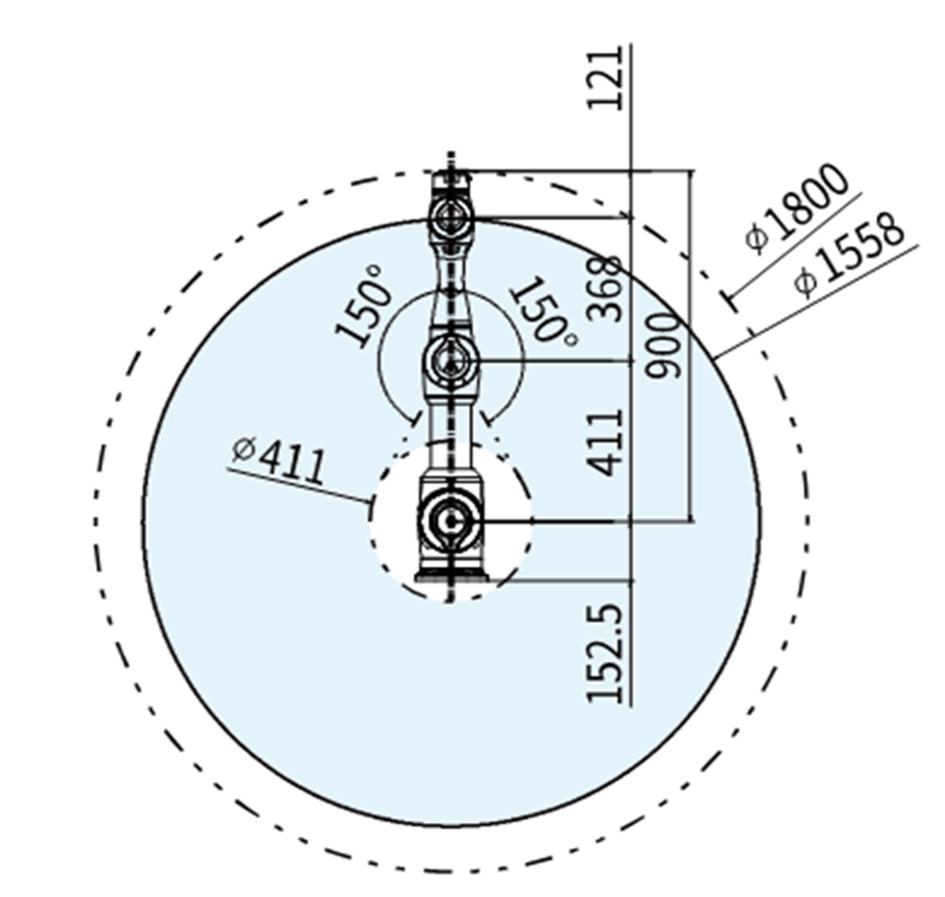
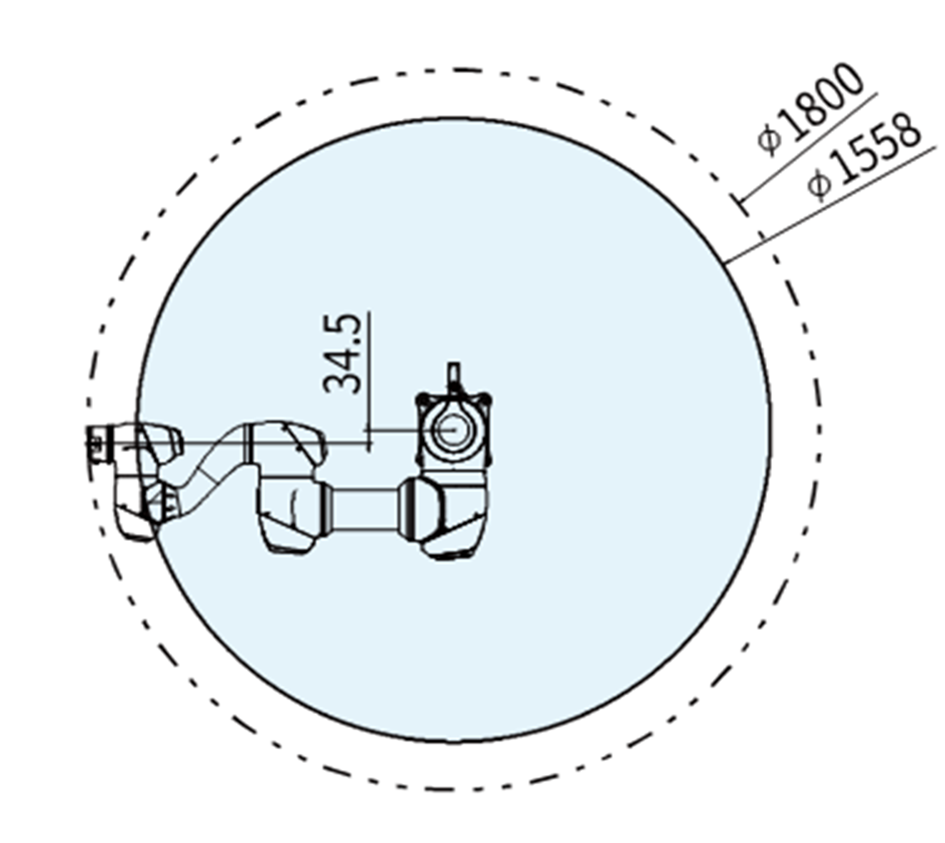
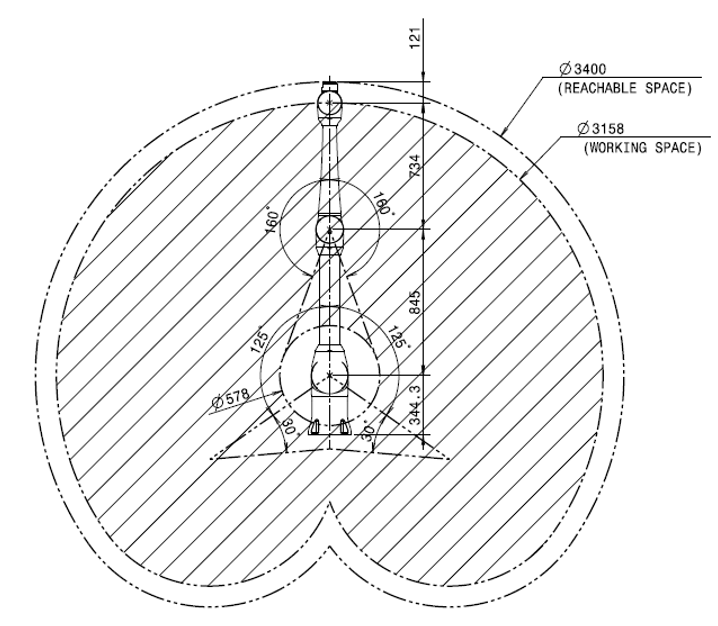
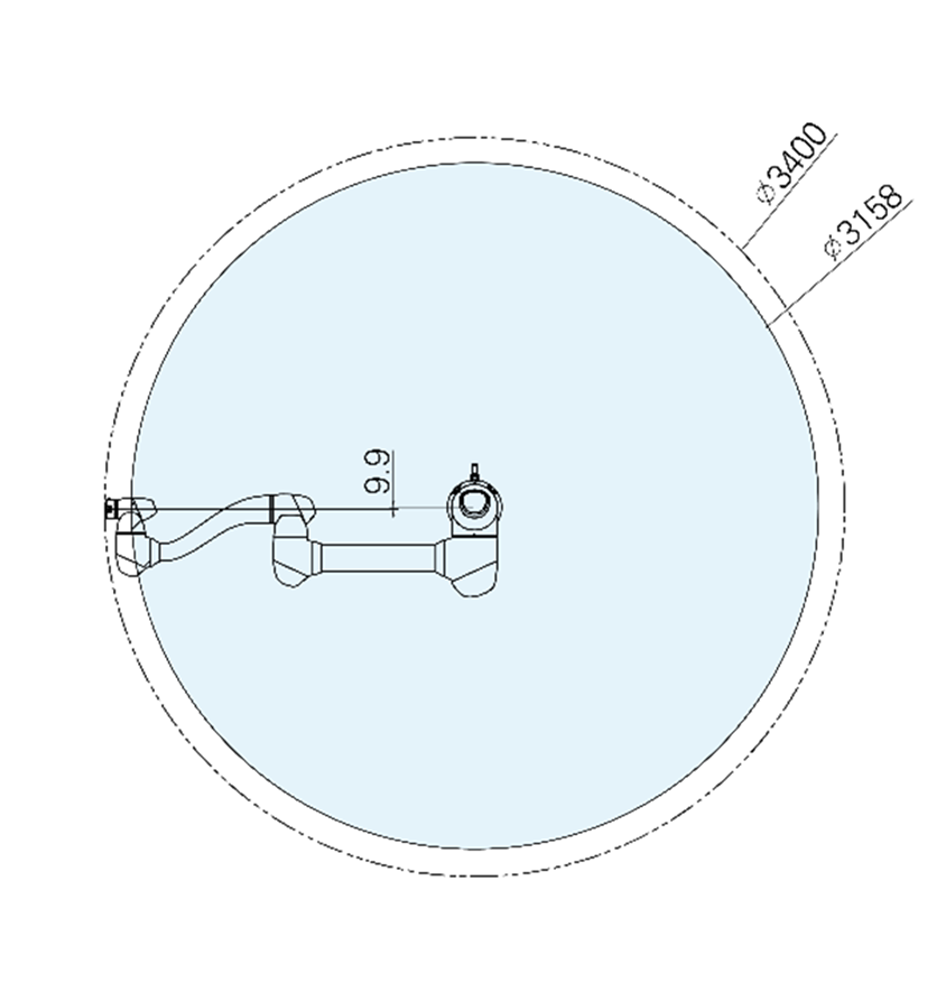
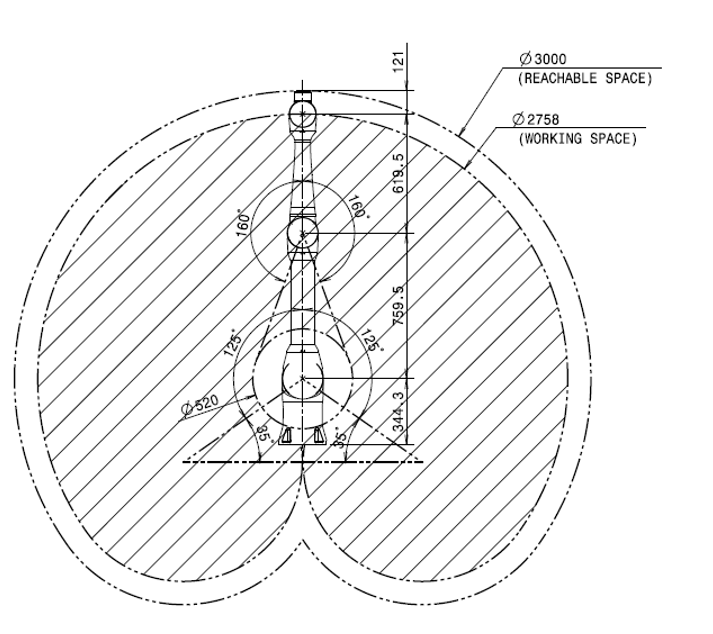
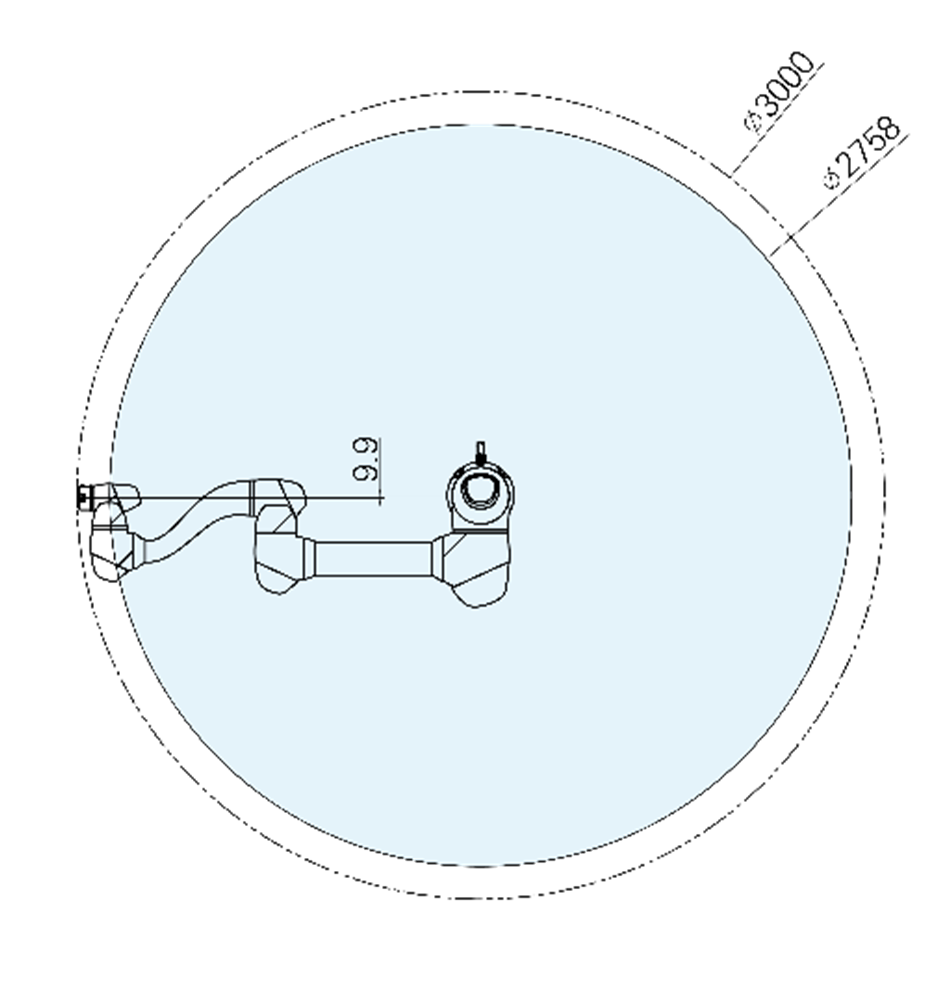
로봇의 작업영역
M0609
 |  |
M0617
 |  |
M1013
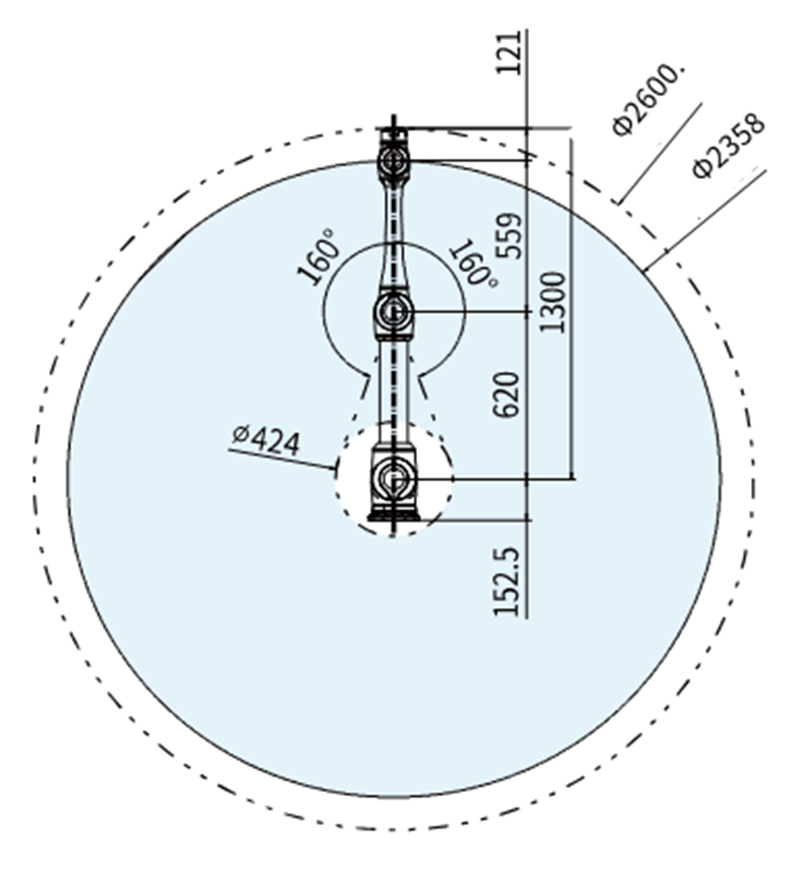 | 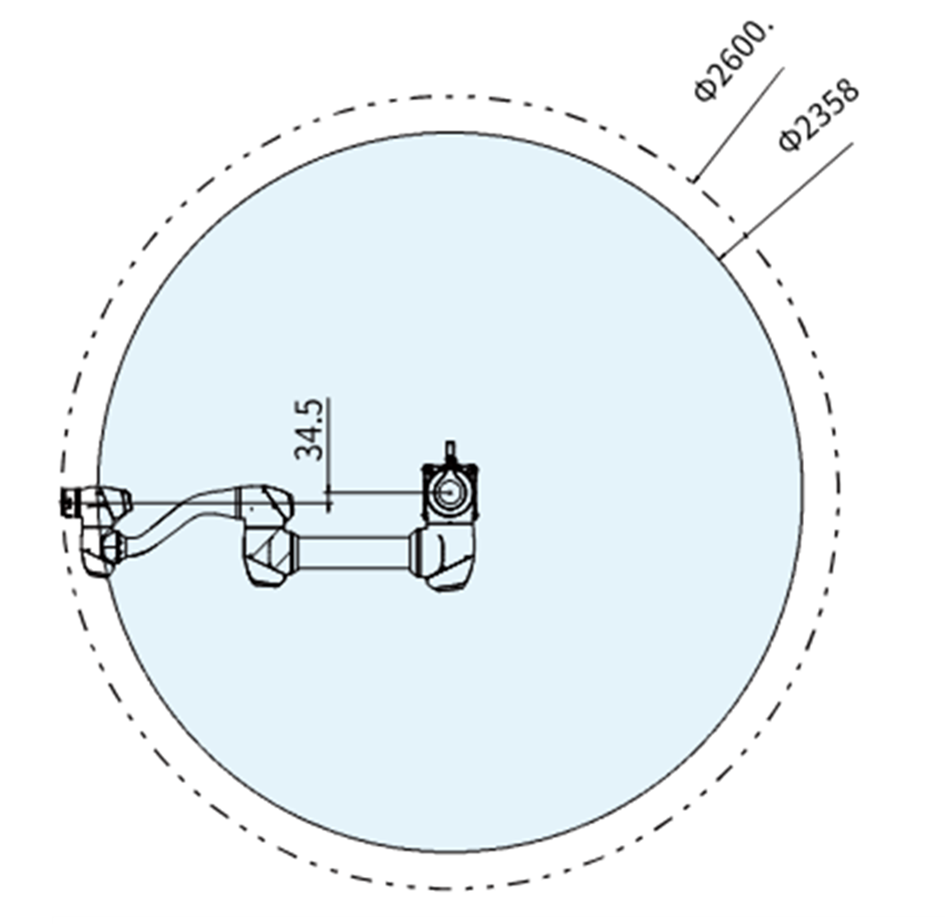 |
M1509
 |  |
H2017
 |  |
H2515
 |  |
작업영역내에서의 최대 가반하중
작업 영역 내에서 로봇의 최대 가반하중은 무게 중심 거리에 따라 달라집니다. 거리별 가반 하중은 다음과 같습니다.
알아두기
본 부하 다이어그램은 작은 툴 부하체적을 가정합니다. 동일한 중량의 툴이라도 큰 부하 체적을 갖는 이 경우 툴의 무게중심은 위의 가반하중보다 더 제한될 수 있으며 이 경우 진동 등이 발생할 가능성이 있습니다.
M0609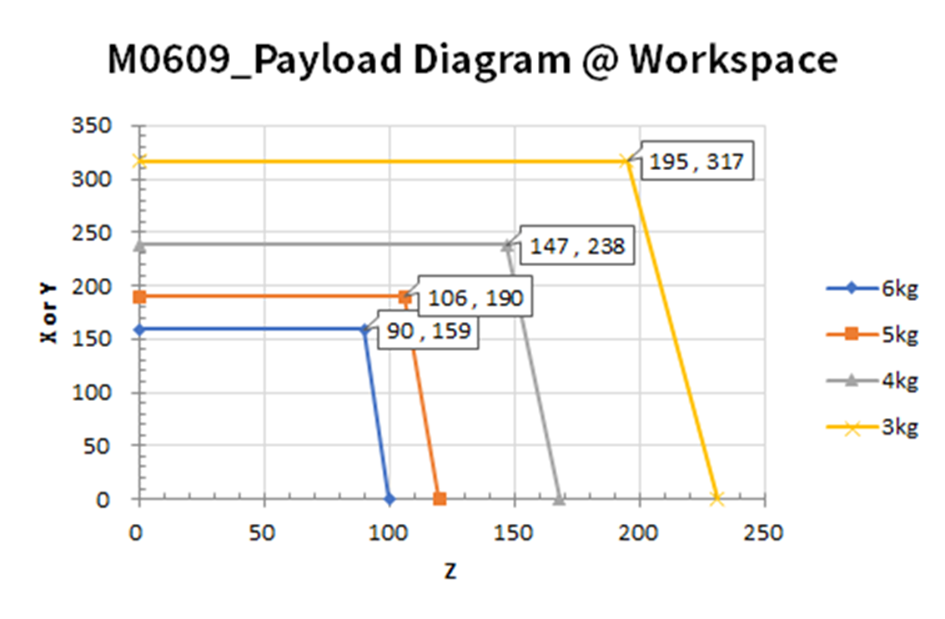 | M0609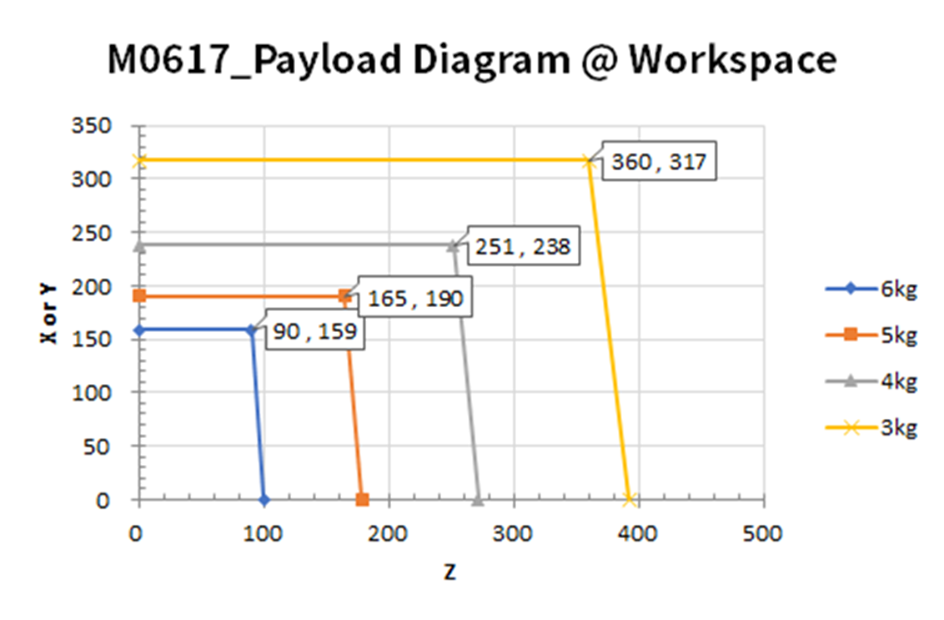 |
M1013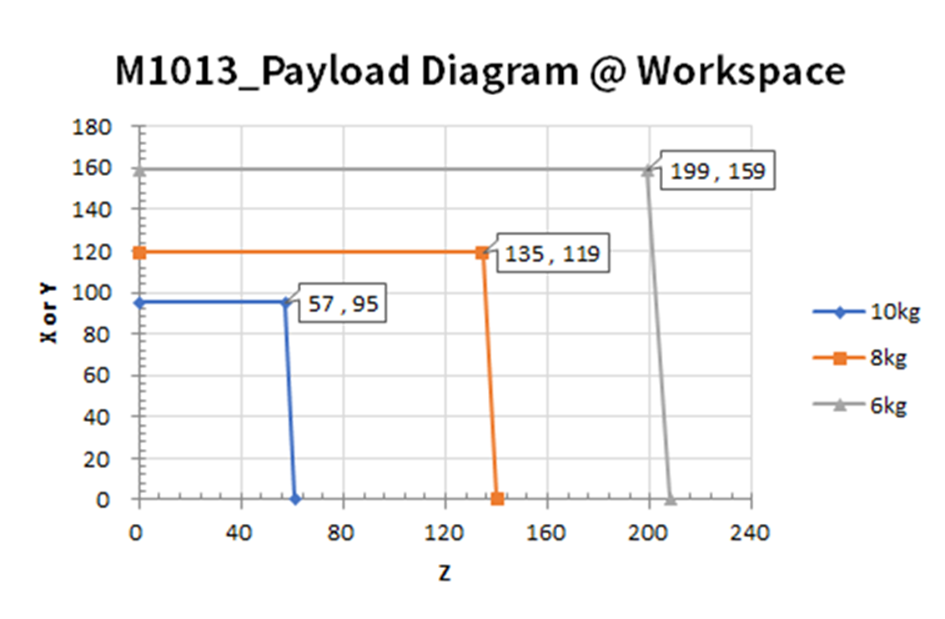 | M1509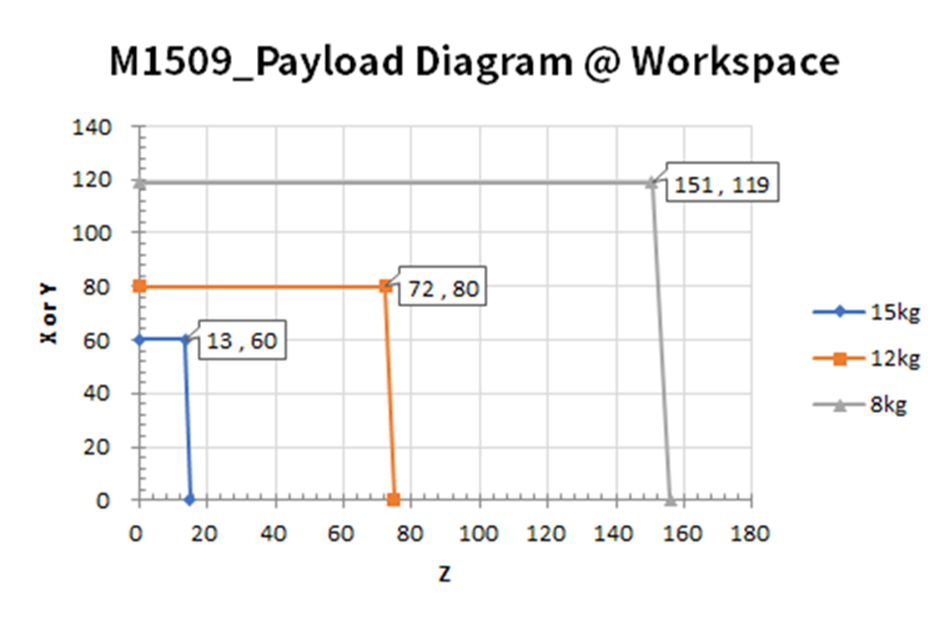 |
H2017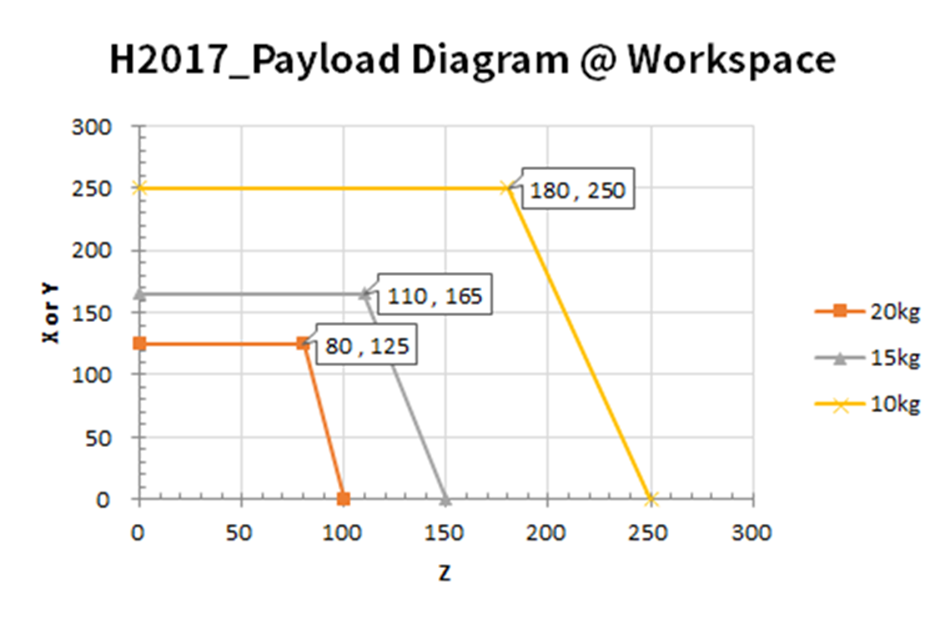 | H2515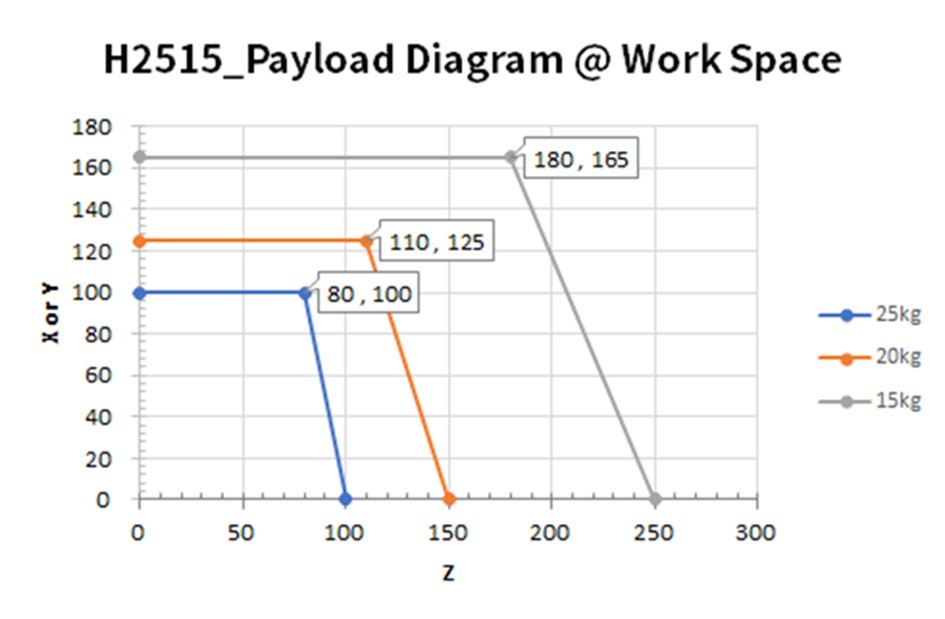 |
허용 모멘트 및 관성(Inertia)
로봇의 J4~J6의 허용 모멘트 및 관성(Inertia) 정보는 아래와 같습니다.
모델명 | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
허용 모멘트 | 관성 (Inertia) | 허용 모멘트 | 관성 (Inertia) | 허용 모멘트 | 관성 (Inertia) | |
M0609 | 36 Nm | 1.6 kg㎡ | 36 Nm | 1.6 kg㎡ | 36 Nm | 1.6 kg㎡ |
M0617 | ||||||
M1013 | ||||||
M1509 | ||||||
H2017 | 145 Nm | 8.0 kg㎡ | 81Nm | 4.5 kg㎡ | 36 Nm | 2.0 kg㎡ |
H2515 | ||||||
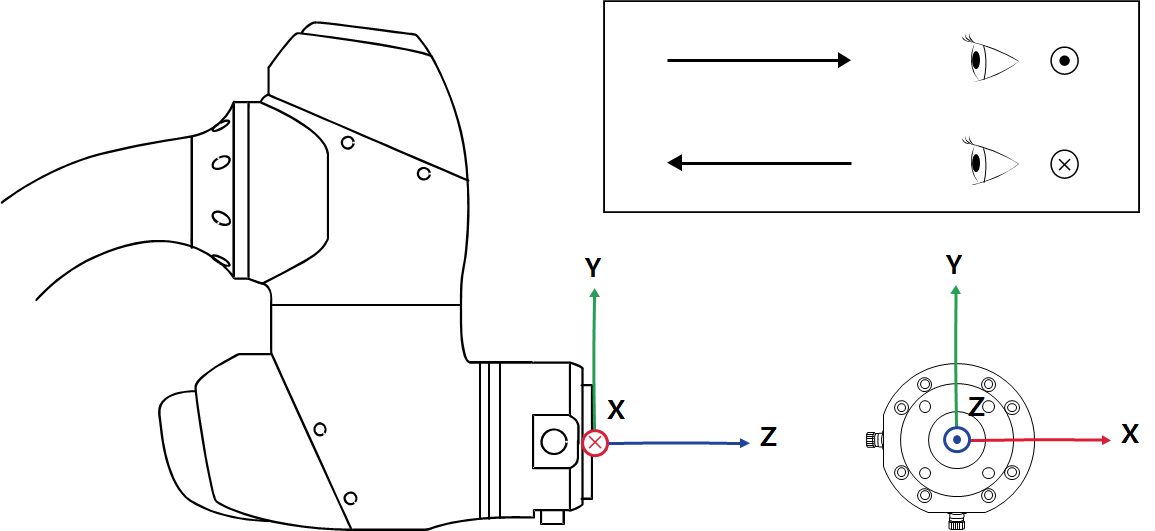
툴의 중심 위치
툴의 중심 위치는 아래 그림을 참조하세요.
기본 사양
모델명 | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 | |
|---|---|---|---|---|---|---|---|
중량 | 27 kg | 34 kg | 33 kg | 32 kg | 79 kg | 77 kg | |
작업 반경내에서의 가반하중 | 6 kg | 6 kg | 10 kg | 15 kg | 20 kg | 25 kg | |
최대 작업 반경 | 900 mm | 1700 mm | 1300 mm | 900 mm | 1700mm | 1500mm | |
축의 개수 | 6 | ||||||
최대 TCP 속도 | Over 1 m/s | ||||||
위치 반복정밀도(ISO 9283) | ±0.03 mm | ±0.1 mm | ±0.05 mm | ±0.03 mm | ±0.1 mm | ||
보호등급 | IP 54 | ||||||
소음 | < 65 dB | ||||||
설치 방향 | 모든 방향 (Any Orientation) | 바닥 (Only Floor) | |||||
컨트롤러 및 티칭펜던트 | Doosan Controller & Teach Pendant | ||||||
진동 및 가속도 | 10≤f<57㎐ - 0.075mm amplitude 57≤f≤150㎐ – 1G | ||||||
충격 | Max Amplitude : 50㎨(5G)
| ||||||
동작 온도 | 0 ℃ ~45 ℃ (273K to 318K) | ||||||
보관 온도 | -5 ℃ ~50 ℃ (268K to 323K) | ||||||
습도 | 20%~80% | ||||||
축별 사양
모델명 | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 |
|---|---|---|---|---|---|---|
가동각 | ||||||
J1 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J2 | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±125° (TP:±95°) | ±125° (TP:±95°) |
J3 | ±150° (TP:±125°) | ±165° (TP:±145°) | ±160° (TP:±135°) | ±150° (TP:±125°) | ±160° (TP:±135°) | ±160° (TP:±135°) |
J4 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J5 | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) |
J6 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
축별 최대 속도(정격 가반하중 운전시) | ||||||
J1 | 150 °/s | 100 °/s | 120 °/s | 150 °/s | 100 °/s | 100 °/s |
J2 | 150 °/s | 100 °/s | 120 °/s | 150 °/s | 80 °/s | 80 °/s |
J3 | 180 °/s | 150 °/s | 180 °/s | 180 °/s | 100 °/s | 100 °/s |
J4 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |
J5 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |
J6 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |