
원격 제어 모드 실행 절차
1. 프로그램 작성
원격으로 제어할 프로그램을 미리 작성해 두어야 합니다.
Task Editor 모듈에서 태스크를 생성합니다.
작성이 완료되면 태스크를 저장합니다.
2. 필수 설정 구성
리모트 컨트롤 모듈에서 다음 항목을 필수로 설정해야 합니다.
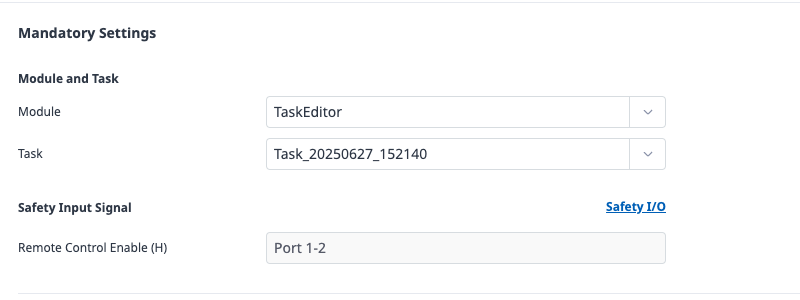
모듈 및 태스크 선택
목록에서 실행할 모듈과 태스크를 선택합니다.
원격 제어 활성화 신호 지정
Robot Parameter모듈의 안전 입출력 메뉴에서 Remote Control Enable 신호를 선택하고, 사용할 포트를 할당합니다.
필수 설정이 완료되지 않으면 리모트 컨트롤 모드를 실행할 수 없습니다.
3. 고급 설정 구성 (선택 사항)
필요에 따라 고급 설정을 지정할 수 있습니다.
설정하지 않으면 해당 기능은 사용되지 않으며, 리모트 제어 동작에는 영향이 없습니다.
재부팅 시 자동 시작

해당 옵션을 활성화하면, 로봇 전원이 켜질 때 자동으로 원격 제어 화면으로 진입합니다.
안전 출력 신호
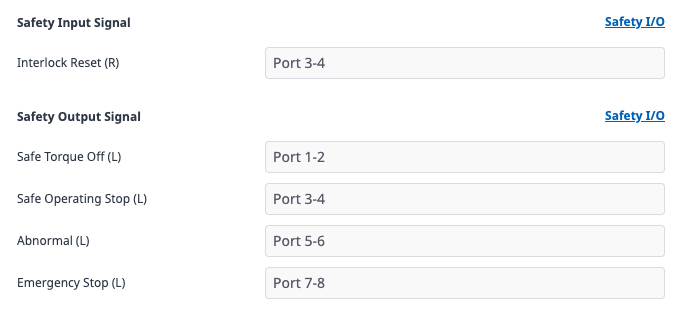
STO(안전 토크 오프), SOS(안전 제한 속도) 신호 출력 포트를 지정합니다.
알아두기
각 신호에 대한 자세한 정보는 안전 신호 입출력(Safety I/O) 을 참조하십시오.
제어 입력 신호
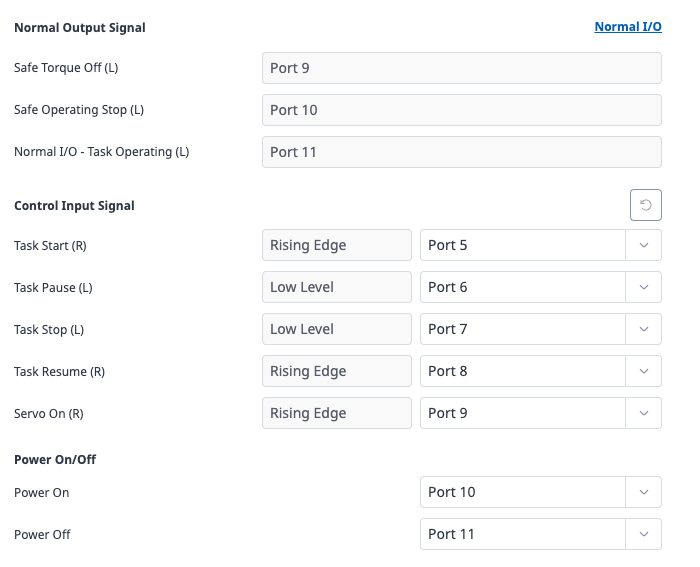
Start, Stop, Pause, Resume 명령어용 디지털 입력 포트를 설정합니다.
4. 리모트 컨트롤 모드 진입
설정이 완료되면 리모트 컨트롤 모드에 진입할 수 있습니다.
리모트 컨트롤 모듈 화면에서 원격 제어 시작하기 버튼을 클릭합니다.
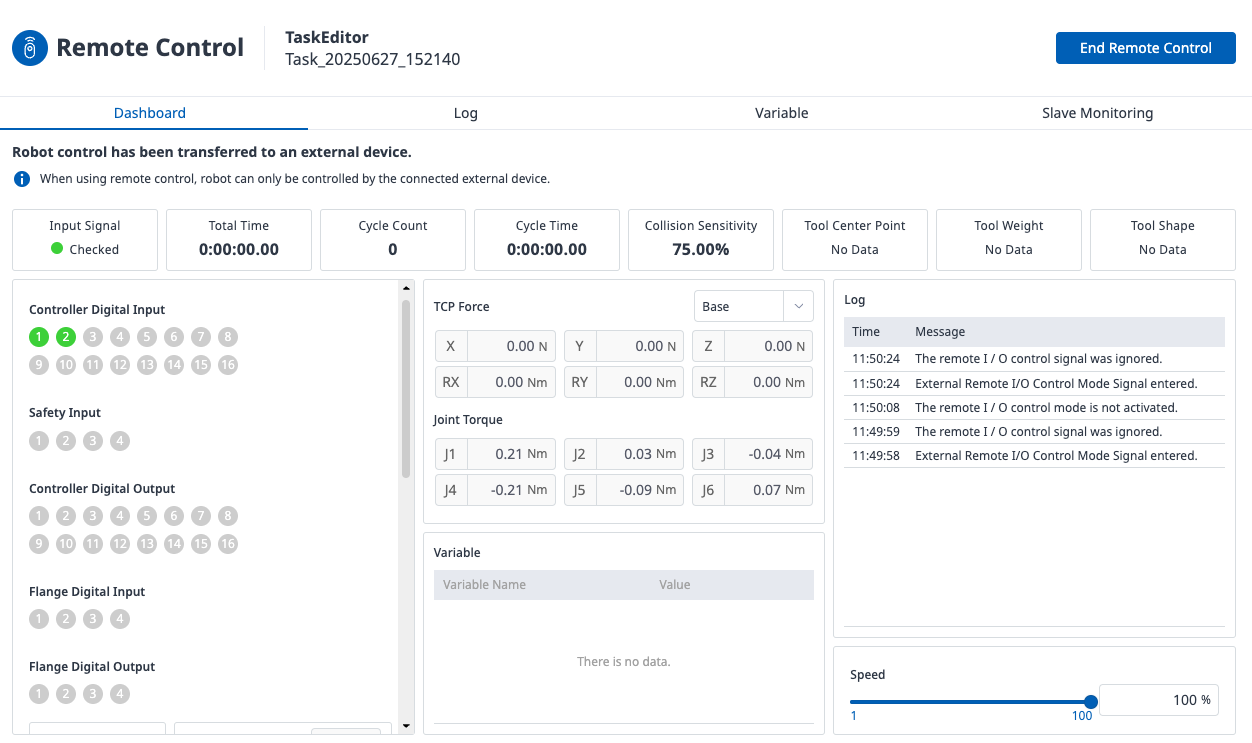
5. 원격 제어 실행
지정한 프로그램을 원격으로 실행하고, 상태를 모니터링할 수 있습니다.
예를 들어, 리모트 컨트롤 모드 진입 이후 로봇에서 지정된 태스크를 실행하고자 한다면,
먼저 Servo On(상승 엣지) 신호를 통해 지정한 포트로 서보를 활성화한 뒤,
Task Start(상승 엣지) 신호를 입력하여 필수 설정 항목에서 선택한 태스크를 실행할 수 있습니다.
이러한 신호들은 선택 항목이기 때문에 설정하지 않아도 리모트 컨트롤 모드로 진입은 가능하지만,
해당 모드에서 이러한 선택 기능들을 활용하려면 사용하고자 하는 포트를 지정하고, 해당 신호를 올바르게 인가해야 합니다.