
MoveJoint.srv
기능
로봇제어기에서 로봇을 현재 관절위치에서 목표 관절위치까지 이동시키기 위한 서비스입니다.
인수
| 인수명 | 자료형 | 기본값 | 설명 |
|---|---|---|---|
pos | float64[6] | - | 6개 축에 대한 목표 관절 위치 |
vel | float64 | - | 속도 |
acc | float64 | - | 가속도 |
time | float64 | 0.0 | 도달 시간 [sec] |
radius | float64 | 0.0 | blending시 radius |
mode | int8 | 0 | MOVE_MODE_ABSOLUTE =0 MOVE_MODE_RELATIVE =1 |
blendType | int8 | 0 | BLENDING_SPEED_TYPE_DUPLICATE =0 BLENDING_SPEED_TYPE_OVERRIDE =1 |
syncType | int8 | 0 | SYNC = 0 ASYNC = 1 |
알아두기
time 지정 시, vel, acc 를 무시하고 time 기준으로 처리됩니다.
주의
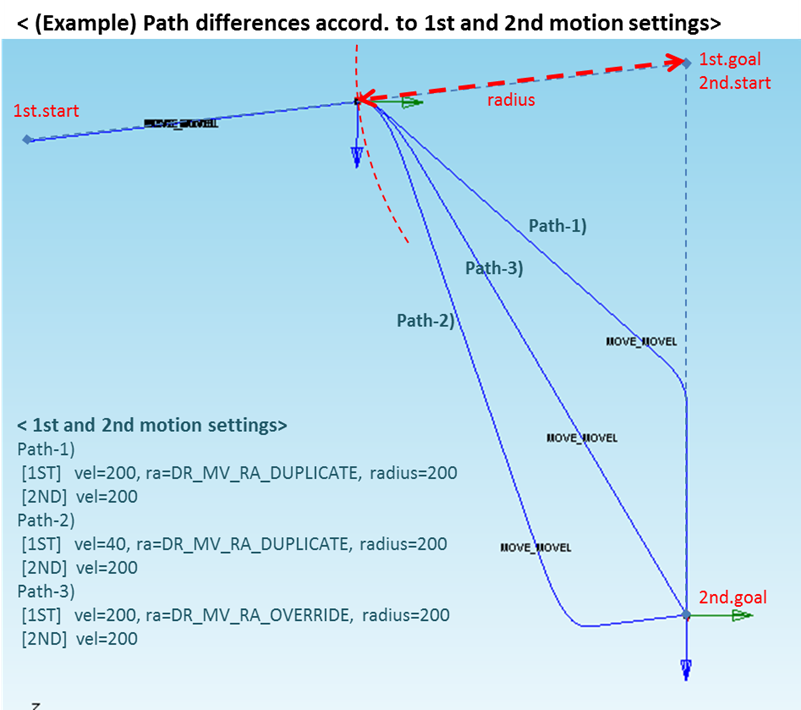
blendType이 BLENDING_SPEED_TYPE_DUPLICATE이고 radius 가 0보다 큰 조건으로 후속 모션이 블렌딩 될 경우 선행모션의 잔여거리, 속도, 가속도로 결정되는 잔여모션시간이 후행모션의 모션시간보다 큰 경우 후행모션이 먼저 종료된 후 선행모션이 종료될 수 있습니다. 관련한 사항은 아래 이미지를 잠고하십시오.
리턴
| 인수명 | 자료형 | 기본값 | 설명 |
|---|---|---|---|
success | bool | - | 성공 여부 : True or False |