
Real mode
기능
- 실제 로봇을 구동할 경우에는 real mode를 사용합니다.
- real mode 동작 시에는 실제 로봇 제어기와 통신 연결을 해야만 합니다.
- 로봇 제어기의 디폴트 IP는168.127.100, port는 12345 입니다.
- dsr_launcher 파일 실행 시, mode:=real host:=192.168.127.100 port:=12345 로 설정합니다.
ex> roslaunch dsr_launcher single_robot_gazebo.launch mode:=real host:=192.168.127.100 port:=12345
실제 제어기 연결
그림 2.2 TP 화면
- 사용자는 TP 화면의 Setting -> Network에서 고정 IP를 설정할 수 있습니다.
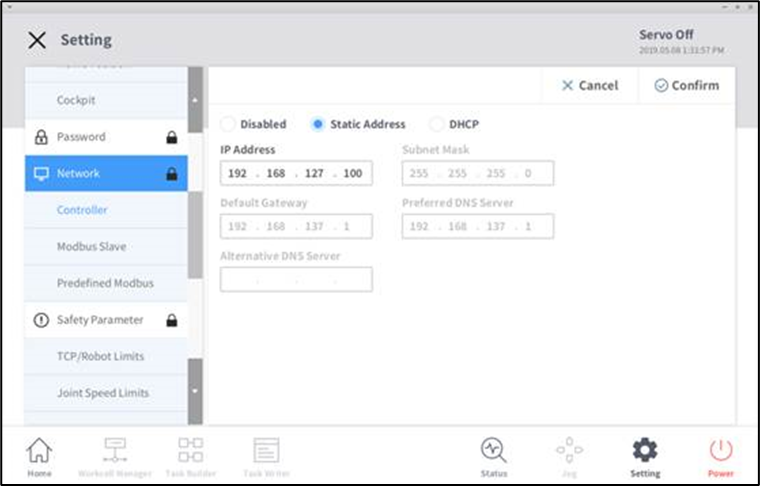
그림 2.3 TP 상에서 제어기 IP 확인
- Network 탭에서 설정된 제어기의 IP를 확인하고, 이 IP를 ROS 상에서 host := ROBOT_IP로 사용합니다.
- ROS Control Node가 올바르게 실행되었다면, TP의 제어권이 ROS로 넘어갑니다.
- 제어권이 넘어간 TP 화면에는 아래와 같은 팝업이 출력됩니다.
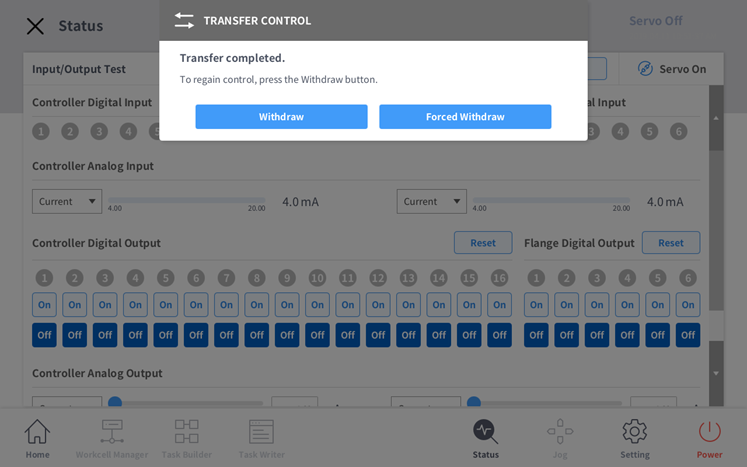
그림 2.4 제어권 이전 시 발생 팝업