
dsr_description <robot_model>.launch
기능
- Rviz 상에 로봇 모델을 띄우고, Joint_state_publisher 를 로딩합니다.
- 로딩된 Joint_state_publisher를 통하여 로봇을 움직입니다.
인수
| 인수명 | 자료형 | 기본값 | 설명 |
|---|---|---|---|
model | - | m1013 | M-Series 로봇 모델 . m0609, m0617, m1013, m1509 A-Series 로봇 모델 . a0509 |
color | - | white | 로봇 컬러 . white or blue |
gripper | - | none | gripper 사용 유무 . none : gripper 미 사용 . robotiq_2f : robotiq two finger 장착 |
예제
BASH
$ roslaunch dsr_description m0609.launch
$ roslaunch dsr_description m1013.launch color:=blue # Change Color
$ roslaunch dsr_description m1509.launch gripper:=robotiq_2f # insert robotiq gripper
$ roslaunch dsr_description m0617.launch color:=blue gripper:=robotiq_2f
$ roslaunch dsr_description a0509.launch # A-Series
하기 3.1 그림과 같이 Rviz 상에 로봇과 Joint_state_publisher 가 로딩 됨. Joint_state_publisher 를 통하여 로봇을 구동 시킴.
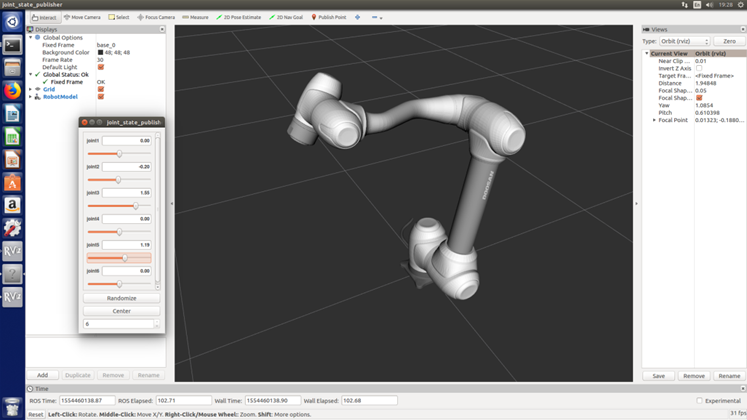
그림 3.1 Rviz 상에 로봇