
Pallet
일정한 배치로 대상물을 배치할 수 있는 거치대의 일종입니다. 최소한의 위치(4점) 교시로 팔렛트의 모든 대상물을 핸들링할 수 있습니다. 행과 열과 함께 층과 두께를 입력하여 팔렛트에 있는 작업물을 순차적으로 접근 할 수 있습니다.
번호 | 항목 | 설명 |
|---|---|---|
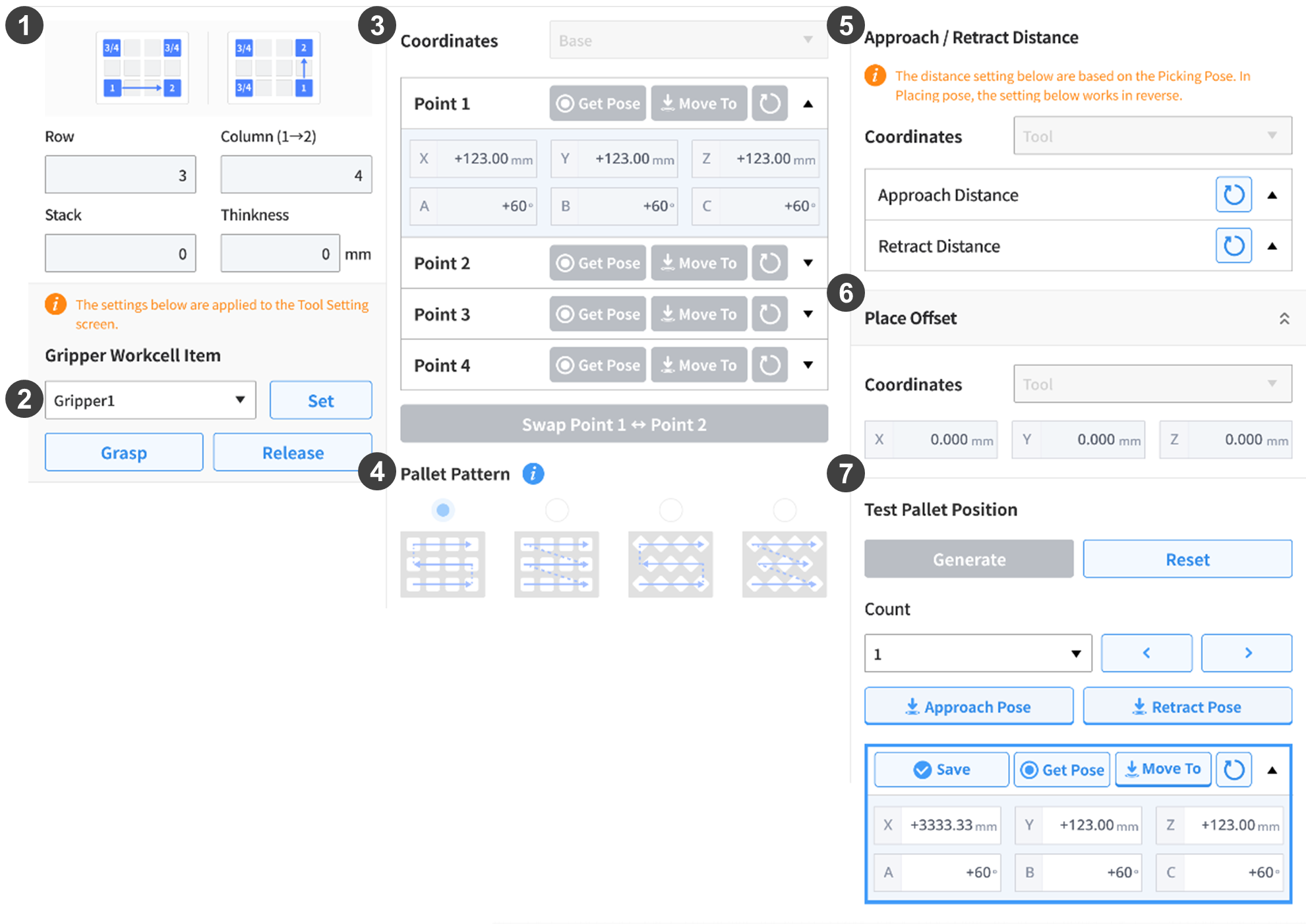
1 | 팔레트 행렬/층/두깨 | 팔레트의 행/열/층의 개수 및 층 높이를 입력합니다. Row : default 3 / range 1~200 Column : default 4 / range 1~200 Stack : default 1 / range 1~9999 Thickness : default 0 / range 0~10000[mm] |
2 | 그리퍼 선택/조작 | 팔레트상에서 사용할 그리퍼를 선택하고 조작할 수 있습니다. |
3 | 포즈 저장 | 팔레트의 기준 좌표계를 선택하고 기준 포인트를 저장합니다. Point1->Point2 방향으로 패턴이 시작됩니다. (필요에 따라 Point1/2를 Swap 할 수 있습니다) Point3, Point4는 순서와 상관없습니다 |
4 | 팔레트 패턴 | 로봇이 이동하는 패턴을 선택합니다 Snake, Zigzag, Rhoumbus Snake, Rhoumbus Zigzag |
5 | 접근/후퇴 거리 | 접근/후퇴 거리를 툴기준으로 x, y, z 값을 입력합니다. 일반적으로 z방향으로 100mm 후퇴를 위해서는 0, 0, -100이 입력되어야 합니다. |
6 | 놓기 오프셋 | 저장된 4개의 포즈(위치) 기반으로 생성된 포인트들에 적용할 오프셋값을 입력합니다. |
7 | 팔레트 포인트 테스트 | 생성된 팔레트 포인트를 확인하기 위해 Generate를 활용할 수 있습니다 수정된 값을 되돌리기 위해서 Reset을 활용할 수 있습니다. Count를 입력/선택하던가 <, >화살표로 확인하고자 하는 포인트를 선택할 수 있습니다. 포인트의 순서는 선택된 pattern정보에 따라 생성됩니다 Approach Pose 버튼을 이용해 Approach Pose로 이동할 수 있습니다. Retract Pose 버튼을 이용해 Retract Pose로 이동할 수 있습니다. Move To 버튼을 이용해 계산된 팔레트 포인트로 이동할 수 있습니다. Get Pose 버튼을 이용해 현재 위치를 불러올 수 있습니다 Save 버튼을 이용해 Get Pose된 위치(Cockpit 포함) 또는 수기로 입력된 위치정보를 현재 Count에 저장할 수 있습니다 |