
태스크 빌더: 스킬 명령어에서 비전 활용하기
번호 | 항목 | 설명 |
|---|---|---|
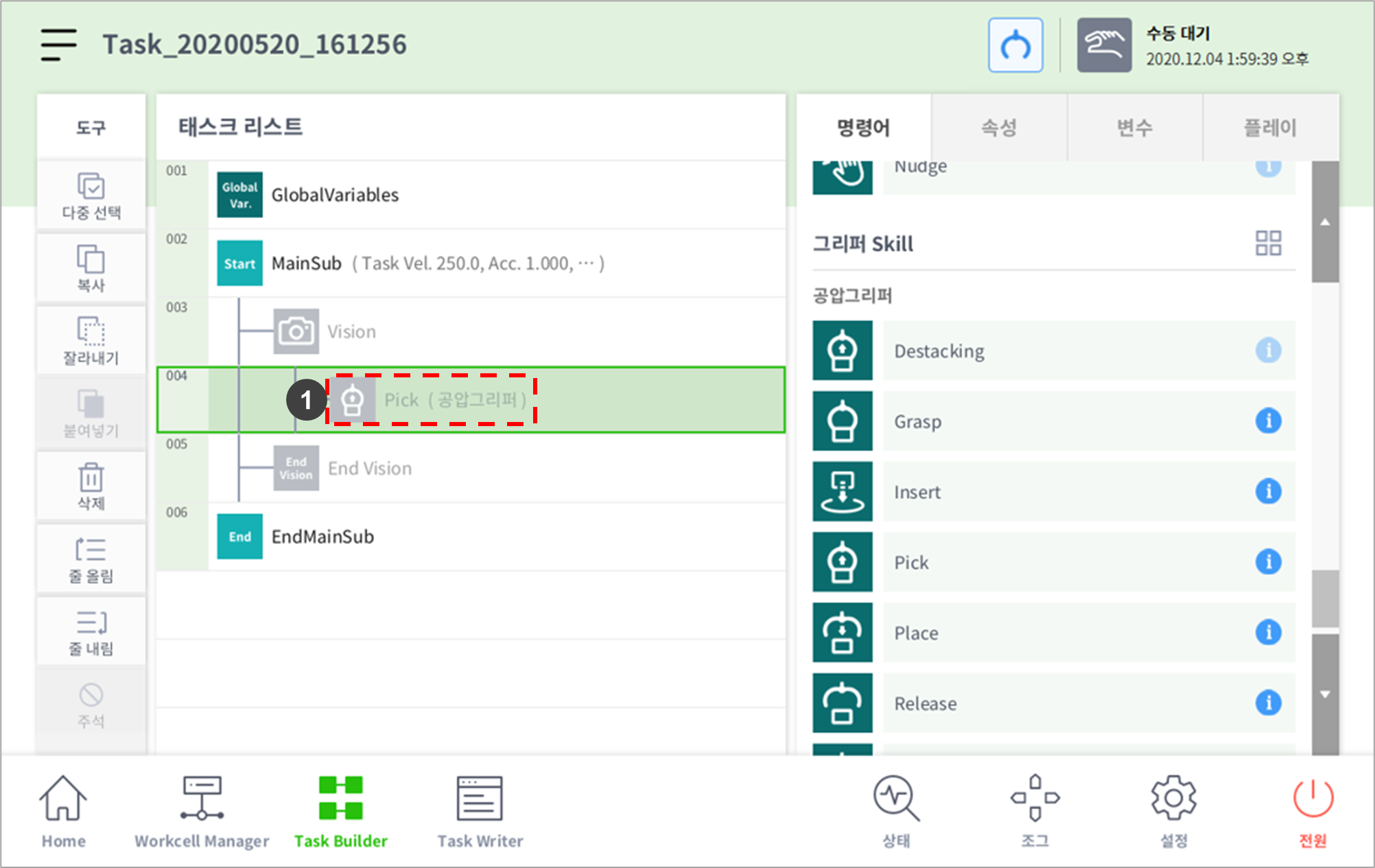
1 | 비전 촬영 후 티칭 위치 진입 전 스킬 명령어 추가 |
주의: “비전 정보로 작업 오프셋 이동”을 사용하려면 워크셀 매니저에서 켈리브레이션을 해야 합니다. 켈리브레이션을 하지 않으면 원하는 위치로 이동할 수 없습니다. |
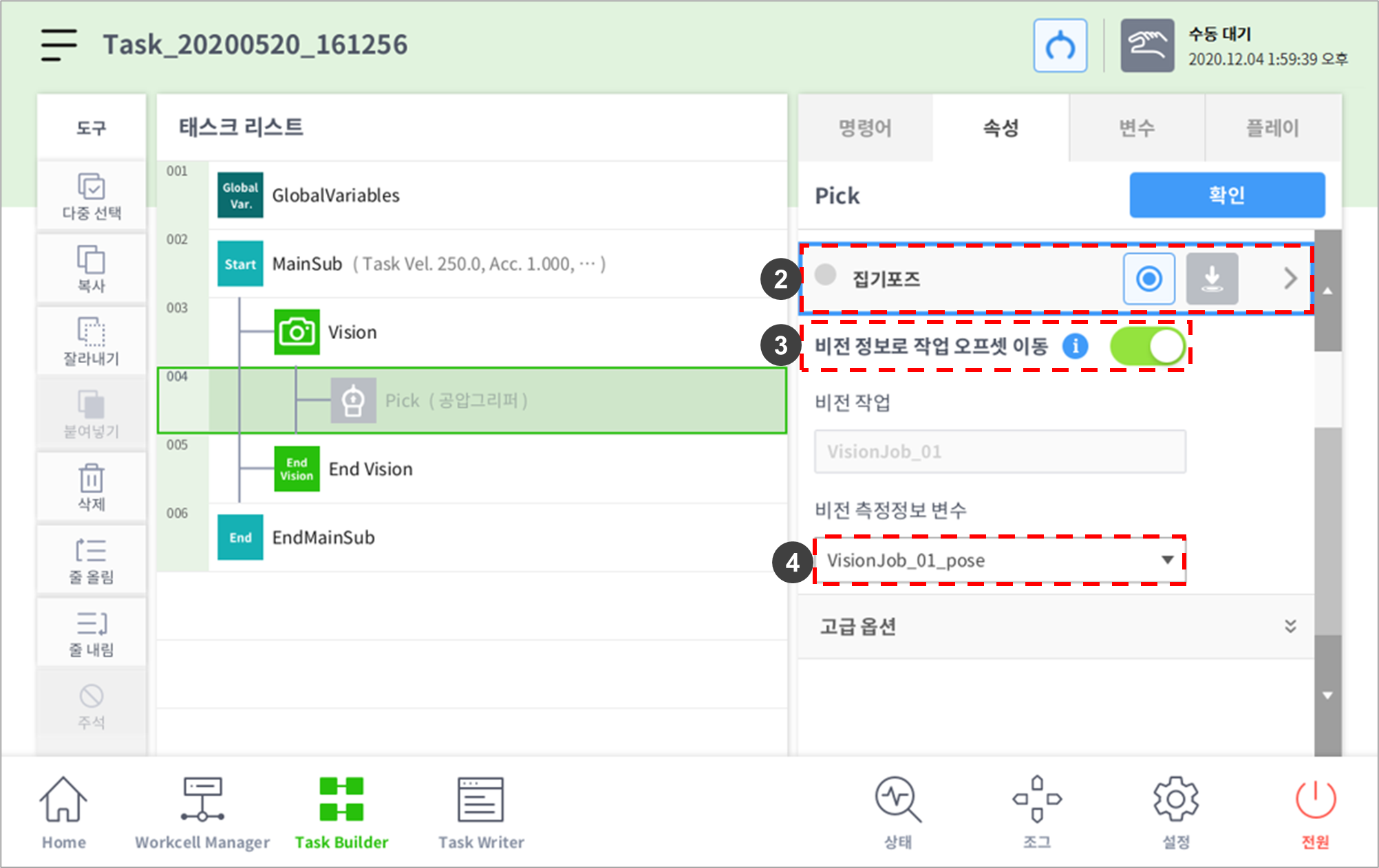
2 | 집기포즈 | 직접교시를 사용해서 비전 Pose를 기준으로 집고자하는 pose로 이동 후 pose를 얻어옵니다. |
3 | 비전 정보로 작업 오프셋 이동 |
|
4 | 비전 측정정보 변수 | 어느 포즈를 이용해 비전과 로봇 좌표계를 정합할지 선택합니다. |