
M&H - Series
주의
- 두산로보틱스는 리프트 장비 사용 등으로 인한 손상에 대해 책임을 지지 않습니다.
- 포장 자재로 로봇을 감싸 이송하는 경우에는 건조한 장소에 보관하십시오. 습기가 많은 장소에 보관할 경우 포장 자재 내부에 습기가 생겨 로봇에 이상일 생길 수도 있습니다.
- 설치 장소로 로봇을 옮기고자 하는 경우에는 로봇의 자중을 고려하여 링크와 베이스 부분을 적정 인원이 동시에 들어 운반하십시오.
- 컨트롤러는 측면부의 손잡이 부분을 잡고 이동하십시오.
- 로봇이나 컨트롤러를 운반할 경우에는 올바른 자세를 유지하여 운반하십시오. 그렇지 않을 경우 허리나 다른 신체 부위에 상해를 입을 수 있습니다.
- 리프팅 장비를 사용하여 운반하는 경우에는 모든 지역 및 국가의 리프팅 지침을 준수하여 운반하십시오.
- 두산로보틱스는 장비 운송 시 발생한 손상에 대해서는 책임을 지지 않으므로 사용자 매뉴얼의 지침을 참고하여 운반하십시오.
Quick Guide
두산로보틱스 제품을 구매해주셔서 감사합니다.
본 설명서는 구성품 확인 및 설치, 사용자 매뉴얼을 다운로드 받기 위한 최소한의 정보를 담고 있으며, 제품 설치, 사용 및 주의사항에 대해서는 상세 매뉴얼을 반드시 참고하시기 바랍니다. 매뉴얼에 대한 상세 정보는 Robot LAB(robotlab.doosanrobotics.com)에서 확인할 수 있으며, 회원 가입이 필요합니다.
제공되는 매뉴얼은 다음과 같습니다.
- User Manual : 로봇의 안전 사항, 설치, 사용, 작업 관리 및 UI의 메뉴에 대해 설명된 매뉴얼 입니다.
- Reference Manual : 워크셀 아이템, 스킬 명령어, 태스크 템플릿 그리고 주요 어플리케이션에 대해 설명된 매뉴얼 입니다.
- Programming Manual : 태스크 프로그래밍에 있어서 알아야 할 문법과 명령어에 대해 설명된 매뉴얼 입니다.
주의사항
- 로봇의 이동이 필요한 경우 출하 시 제공된 포장박스 및 충전재, 포장 기구를 활용하시기 바랍니다. 이를 위해 본 포장박스 및 충전재는 건조하고 서늘한 곳에 보관하십시오.
- 당해 산업용 로봇은 산업안전보건기준에 관한 규칙 및 안전검사 고시(검사 대상일 경우)의 검사기준을 고려하여 설치하여야 합니다.
- 로봇 운송은 크레인 및 지게차, 핸드 리프트를 이용하여 운송할 수 있으며, 크레인을 이용한 리프트 장비 사용 시 해당 지역 또는 국자의 지침을 준수해야 합니다.
- 로봇의 설치 및 이동은 패킹 자세를 활용하시기 바랍니다.
- 기본 구성품 및 추가 구성품(별도구매)이 모두 들어있는지 확인하시고, 문제가 있을 경우 구매처로 문의하십시오.
- 포장 기구와 볼트는 오직 로봇의 이동을 위해 설계되었습니다. 로봇을 이동시키는 것 이외의 용도로 사용하지 마십시오.
- 이동할 때는 로봇에 외부 힘을 가하지 마십시오. 이 지침을 준수하지 않으면 부상 입을 우려가 있습니다.
- 설치 후 포장 기구와 볼트를 제거하십시오. 다시 이동해야 하는 경우 사용할 수 있도록 포장 기구와 볼트를 보관해야 합니다.
- 이동 전에 볼트와 기구물이 잘 조여져 있는지 확인하십시오.
제품 구성
|
|
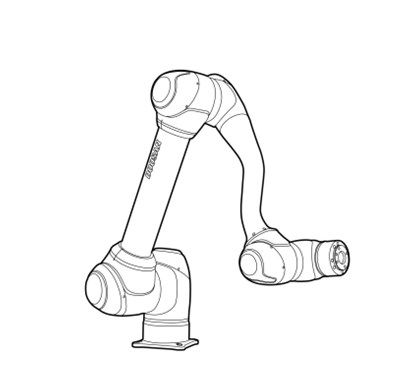
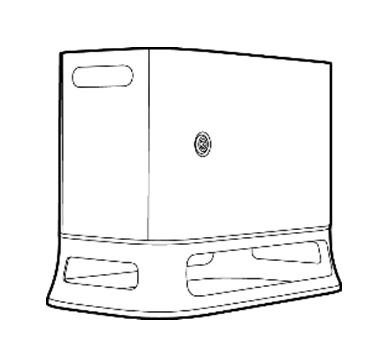
| 매니퓰레이터 | 컨트롤러 (AC/DC) |
|
|
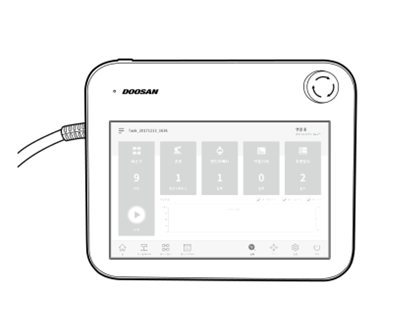
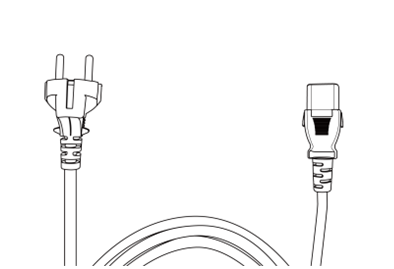
| 티치펜던트 | 컨트롤러 전원 케이블 |
|
|
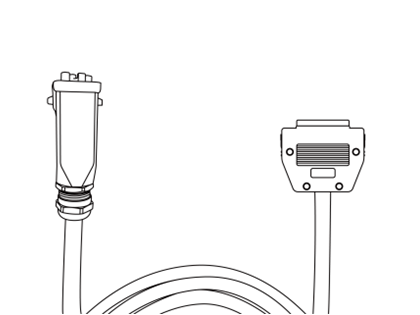
| 매니퓰레이터 연결 케이블 | 사용자 매뉴얼 / 빠른 설명서 |
알아두기
- DART-Platform을 설치하여 사용하실 때에는 별도의 랩탑이 필요합니다.
- DART-Platform은 Windows OS 기반의 데스크톱이나 랩톱에서 실행되는 소프트웨어이며, 티치 펜던트를 사용하는 것과 동일한 로봇의 조작 및 프로그래밍이 가능합니다.
- 추가 구성품에 대한 정보는 홈페이지(www.doosanrobotics.com)에서 확인하십시오.
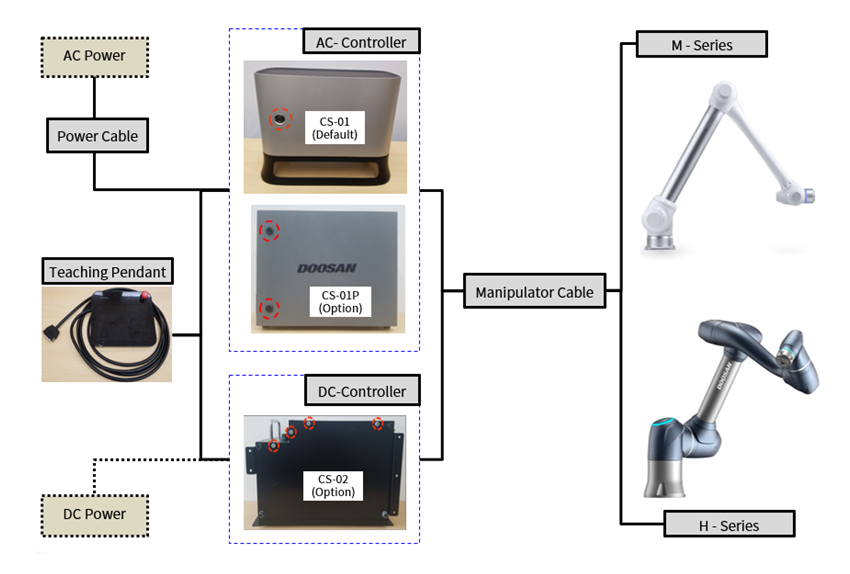
구성품에 따른 시스템 구성
아래의 M과 H시리즈에 대한 로봇 시스템 구성을 참조 바랍니다.
운반
운반 주의사항
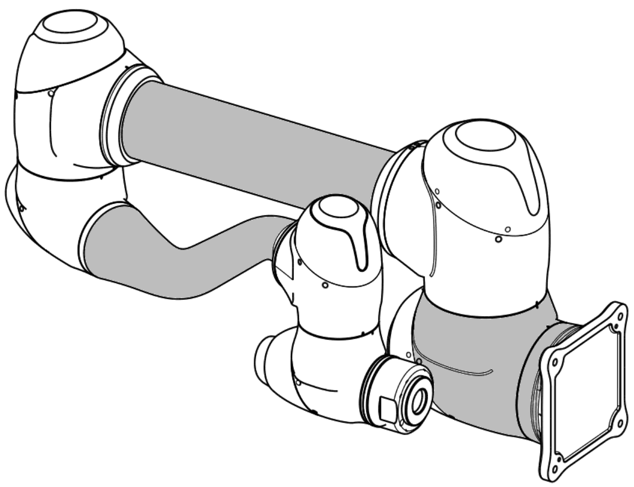
- M 시리즈를 설치 장소로 옮기고자 하는 경우에는 아래 음영 표시된 부분을 들어 이동하십시오. 안전 사고 예방을 위해 기종별 중량을 고려하여 충분한 인원(2인 이상) 이 로봇을 동시에 들어 운반하시기 바랍니다.
- H 시리즈의 경우 “H-Series Handling Guide” 항목을 참고하시기 바라며 반드시 해당 국가의 안전규정에 준하여 운반 바랍니다
- 컨트롤러는 손잡이(측면 하단) 부분을 잡고 이동하십시오.
- 운반 중 낙하에 의해 사고가 발생하지 않도록 주의하십시오.
- 리프팅 장비를 사용하여 운반하는 경우에는 모든 지역 및 국가의 리프팅 지침을 준수하여 운반하십시오.
- 두산로보틱스는 장비 운송 시 발생한 손상에 대해서는 책임을 지지 않으므로 사용자 매뉴얼의 지침을 참고하여 운반하십시오.
- H시리즈는 제조 시기에 따라 세로형 박스(2022년 7월 이전) 또는 가로형 박스(2022년 7월 이후) 포장 상태로 수령하실 수 있습니다. 박스 포장의 형태에 따라 취급 방법이 다르게 적용되므로 아래 가이드를 참고하여 작업하시기 바랍니다.
H-Series Handling Guide
포장상태에서 이동하는 경우
- 포장 상태에서 이동이 필요할 경우 박스 하단을 활용하여 이동 바랍니다.
- 측면에 있는 핸들링 주의사항을 반드시 준수해 주시기 바랍니다.
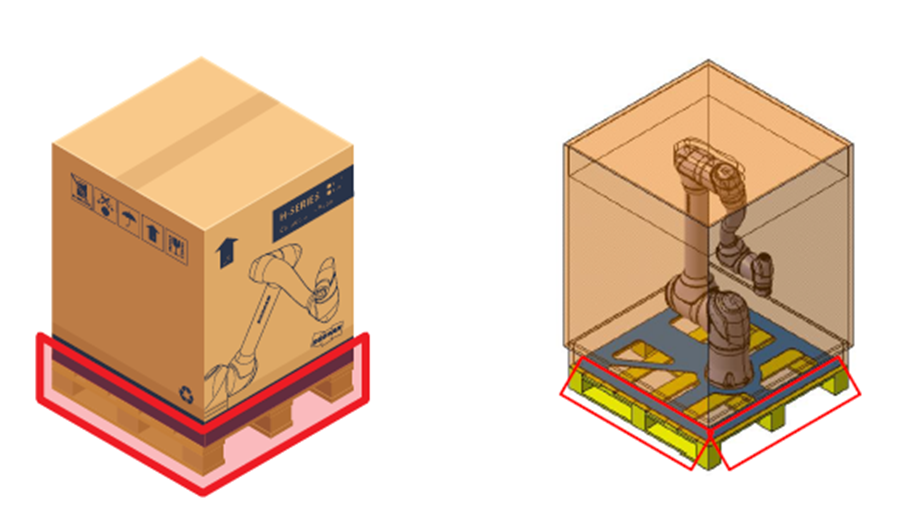
[ 포장 상태시(세로형) : 하부 파렛트 사용 이동 ]
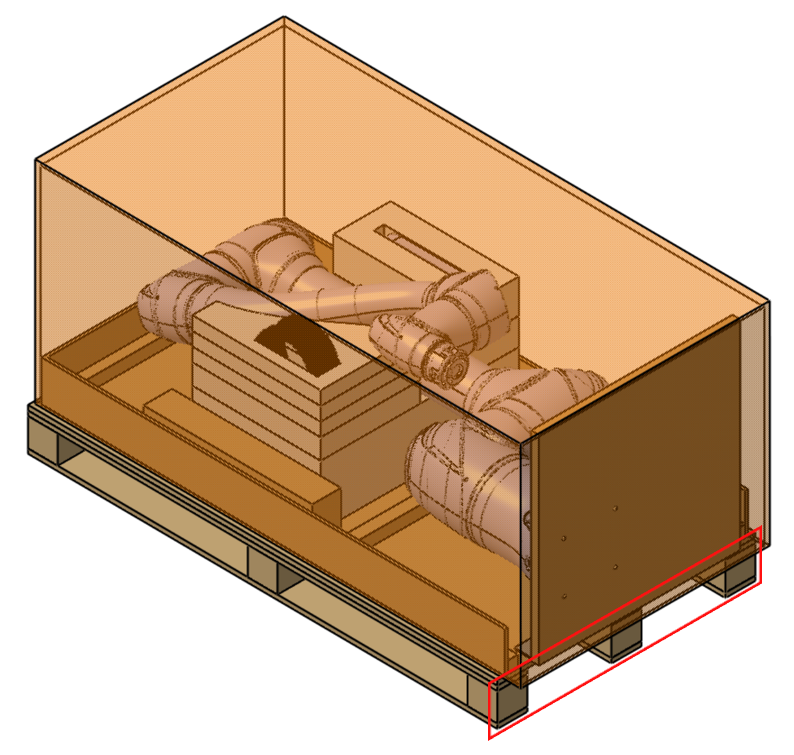
[ 포장 상태시(가로형) : 하부 파렛트 사용 이동 ]
[ 취급주의 표시 ]
매니퓰레이터를 이동/설치하는 경우
- 해당 지역 또는 국가의 운반 작업 중량 운반 작업 기준 등을 지켜서 운반하시기 바랍니다.
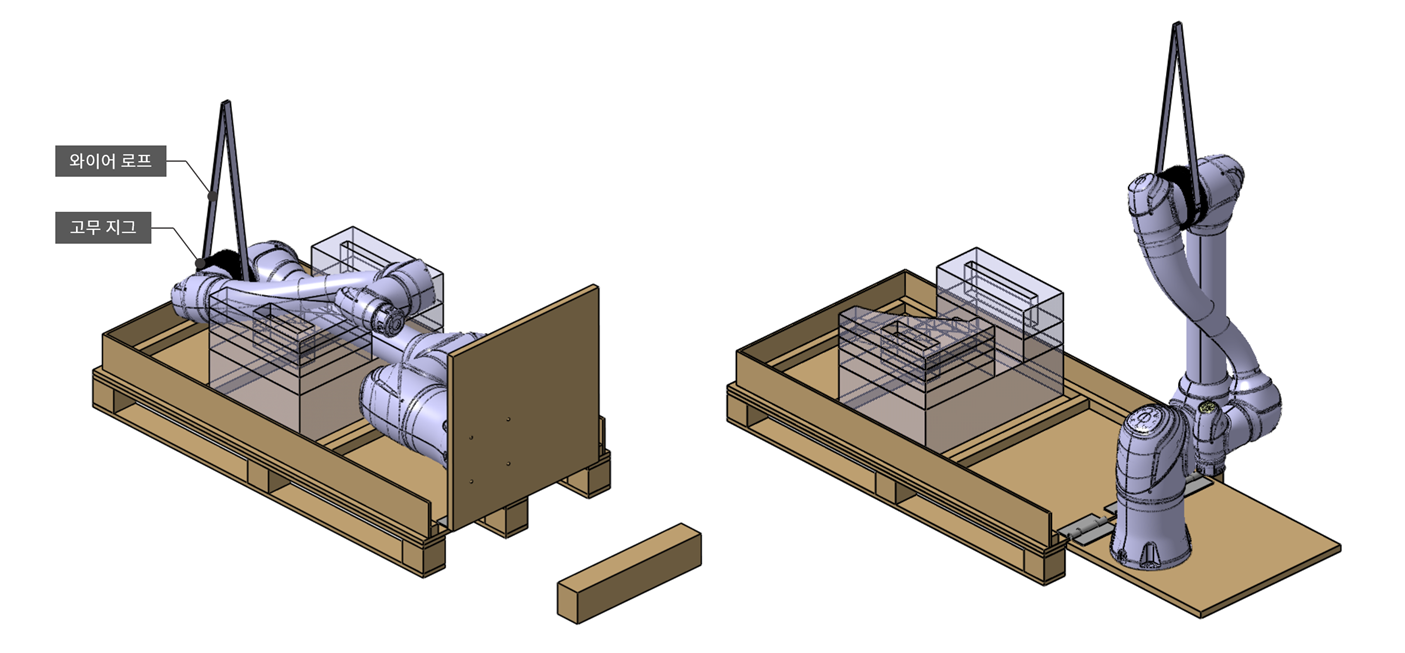
- 별도 제품을 사용하는 경우, 매니퓰레이터 무게를 견딜 수 있을 만큼의 로프 또는 구조물을 사용하십시오.
- 당사에서 제공하는 리프팅 지그를 활용하여 이동 설치하시기를 권장합니다.
- 무게를 견딜 수 있을 만큼 강한 회전 방지용 와이어 로프를 사용하십시오.
- 와이어 로프의 길이는 1500mm 이상이어야 하며, 지그 형태에 따라 최소 1~4 곳을 지지하시기를 권장합니다.
항목 | 최소 용량 |
|---|---|
크레인 | 1,000 kg |
와이어 로프(개당) | 1,000 kg |
리프팅 지그
로봇 프레임에 로프를 고정하는 경우, 고무 지그를 3-4축 사이에 장착한 후에 이용하시기 바랍니다(아래 그림 참고).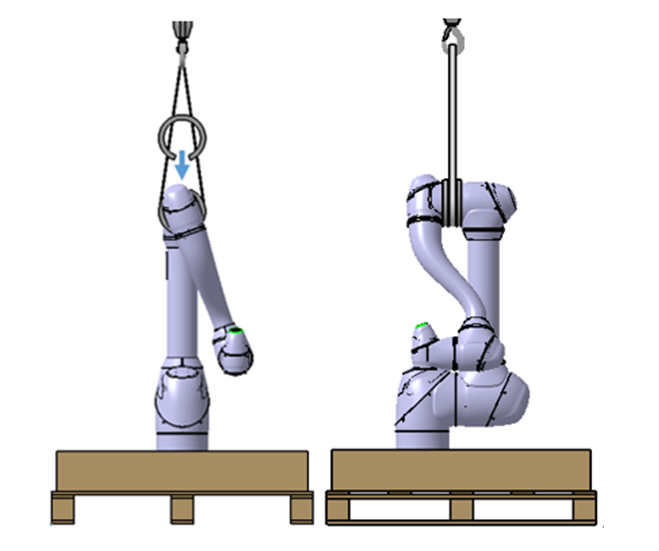
[ 로봇 이동 시(세로형) ]
[ 로봇 이동 시(가로형) ]
알아두기
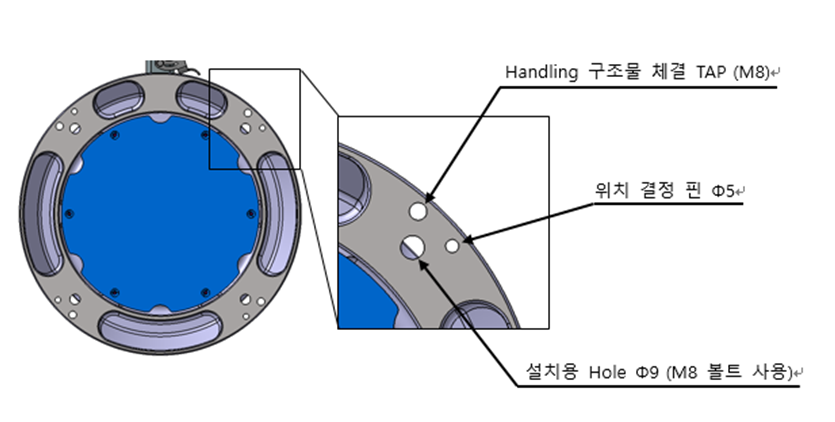
H 시리즈의 경우 해당 작업을 용이하게 할 수 있도록 핸들링이 가능하도록 베이스에 M8 Tap 4곳이 아래와 같이 적용되어 있으니 리프팅 지그 체결 시 사용하시기 바랍니다.
설치
설치 주의사항
- 로봇을 설치하기 전 충분한 설치 공간을 확보하시고, 설치는 바닥이 단단하고 수평인 장소에 설치하시기 바랍니다.
- 설치 장소 주변에 인화성 및 폭발 물질이 없는지 확인하십시오.
- 컨트롤러와 연결하여 사용할 안전 장비는 반드시 안전용 접점입력 단자 또는 Safety IO로 설정한 Configurable 디지털 IO에 이중신호로 연결하십시오. 일반 IO에 연결하거나 단일신호로 연결하여 사용할 경우, 규정된 안전수준을 달성할 수 없습니다.
매니퓰레이터 고정
- 매니퓰레이터 베이스에 있는0mm 구멍 4개에 M8 볼트를 이용하여 고정하십시오.
- 볼트를 고정할 때에는 볼트가 풀리지 않도록 끝까지 조이십시오. 또한 20 Nm의 토크로 볼트를 조이는 것을 권장합니다. 진동에 의한 풀림 방지를 위해서 와셔(스프링-평) 사용하시기 바랍니다.
- 매니퓰레이터를 고정된 위치에 정확하게 설치해야 하는 경우에는 2개의 Φ5의 위치 결정 핀을 이용하면 원하는 위치에 설치할 수 있습니다.
- 매니퓰레이터를 설치할 때, 마운팅 볼트을 완전히 조이십시오. 마운팅 볼트가 헐거울 경우, 작동시 베이스와 매니퓰레이터가 분리되어 고장이 발생할 수 있습니다.
- 매니퓰레이터 베이스에 진동이 발생하면 매니퓰레이터는 자동으로 충돌이라고 판단하여 비상 정지합니다. 그러므로 자동으로 위치가 이동되는 곳에 설치하는 경우 이동 가속도가 높은 장소에는 설치하지 마십시오.
- 위험성평가에 따라 안전 측정 및 로봇 안전 구성 매개변수를 정확히 지정했는지 확인하십시오. 그렇지 않을 경우, 로봇이 손상되거나 사용자가 상해를 입을 수 있습니다.
- 로봇 마운팅 각도, TCP 무게, TCP 오프셋, 안전 구성과 같은 로봇 설치와 관련된 설정을 올바르게 진행하십시오. 그렇지 않을 경우, 로봇이 손상되거나 사용자가 상해를 입을 수 있습니다.
- H 시리즈의 경우 Floor기준 사용만 가능하며 안전사고 방지를 위해 로봇 자중을 고려하여 “H-Series Handling Guide” 항목을 반드시 참조하시어 설치하시기 바랍니다.
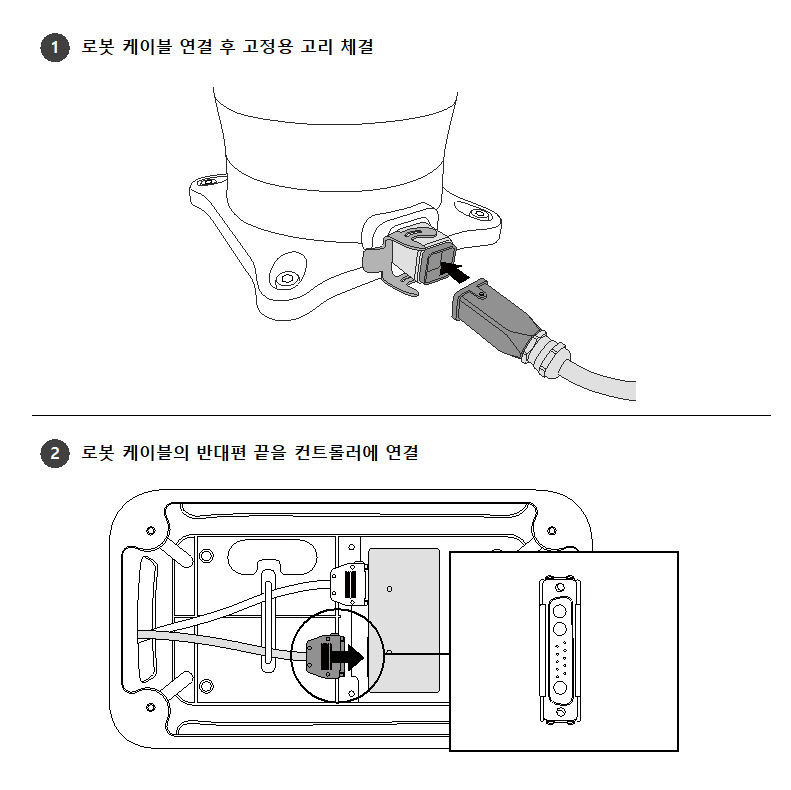
매니퓰레이터와 컨트롤러 연결
- 매니퓰레이터 케이블을 컨트롤러의 해당 연결부에 연결한 후 고정용 고리를 걸어 케이블이 빠지지 않도록 하십시오. 매니퓰레이터 연결 케이블의 반대편 끝을 컨트롤러의 해당 연결부에 딸깍 소리가 날 때까지 연결하여 케이블이 빠지지 않도록 하십시오.
※ 설치 관련 상세 내용은 설치 매뉴얼을 참고하십시오.
DART-Platform
사전에 DART-Platform을 설치하십시오. SW 설치는 Robot LAB > Resources > 소프트웨어 (https://robotlab.doosanrobotics.com/ko/MyRobot/DashBoard)에서 확인할 수 있으며, 회원 가입이 필요합니다.
- DART-Platform의 설치가 완료되면 아래의 순서대로 진행하십시오.
- 컨트롤러 하단의 전원 스위치를 켠다.
- 데스크톱 혹은 랩톱을 컨트롤러의 LAN Port에 연결한다.
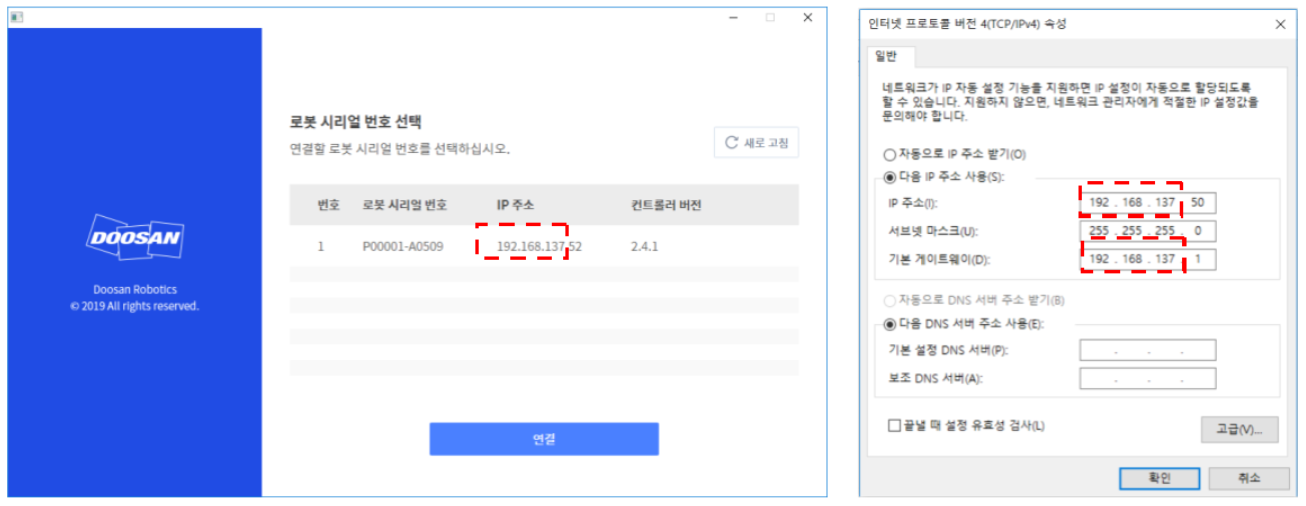
- 부팅 시작된 지 1분 이후 DART-Platform을 실행하고, 네트워크에 연결된 로봇의 시리얼 번호를 확인한다.
- 연결하고자 하는 로봇을 선택 및 연결한다.
알아두기
컨트롤러와 DART-Platform간 연결이 되지 않으면, DART-Platform이 설치된 데스크탑 혹은 랩탑의 인터넷 프로토콜 속성의 IP 주소와 기본 게이트웨이를 컨트롤러의 IP 주소의 C Class 대역까지 동일하게 변경한 후, 연결 시도하십시오.
저작권
본 설명서 및 제품 매뉴얼의 모든 내용과 도안에 대한 저작권 및 지적재산권은 두산로보틱스에 있습니다. 따라서 두산로보틱스의 서면 허가 없이 사용, 복사, 유포하는 어떠한 행위도 금지됩니다. 또한 특허권을 오용하거나 변용하는데 따르는 책임은 전적으로 사용자에게 있습니다.
매뉴얼은 신뢰할 수 있는 정보지만 오류 또는 오탈자로 인한 손실에 대해 어떠한 책임도 지지 않습니다. 제품 개선에 따라 매뉴얼에 포함된 정보는 예고 없이 변경될 수 있습니다.
매뉴얼은 로봇의 소프트웨어 버전에 따른 상세 매뉴얼입니다. 개정된 매뉴얼에 대한 상세 정보는 Robot LAB(robotlab.doosanrobotics.com)에서 확인할 수 있으며, 회원 가입이 필요합니다.
OSS
구매하신 제품에 포함된 소프트웨어에는 프리/오픈소스 소프트웨어가 사용되었습니다.
프리/오픈소스 소프트웨어의 라이선스에 대한 자세한 내용은 웹사이트 내 OSS 사용고지 페이지(www.doosanrobotics.com/kr/oss/license)를 참고하십시오.
이와 관련하여 문의사항이 있으시면 두산로보틱스 마케팅부서(marketing.robotics@doosan.com)로 문의하십시오.