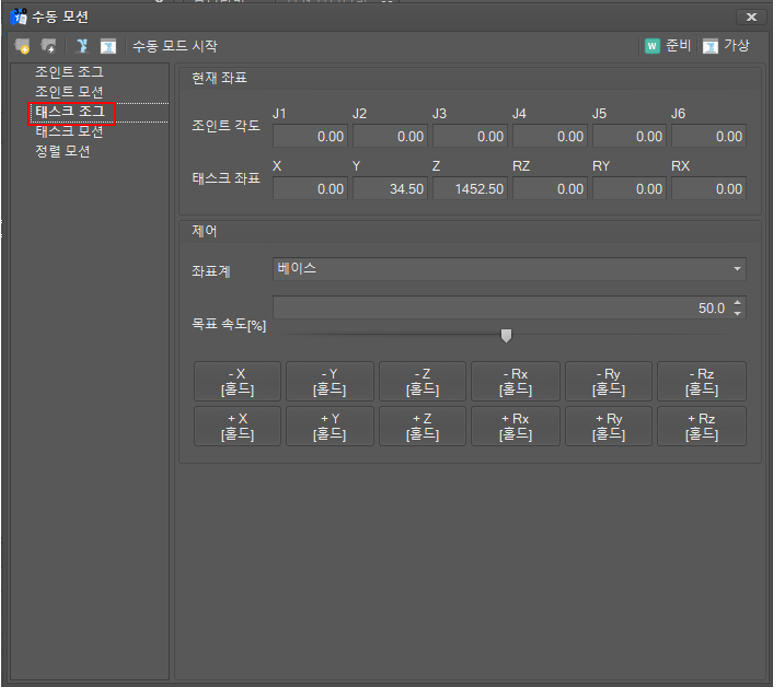
태스크 조그
수동 모션 목록에서 태스크 조그를 선택하십시오. 현재 조인트 각도와 TCP 위치가 표시되며 100 밀리세컨드 간격으로 업데이트됩니다.
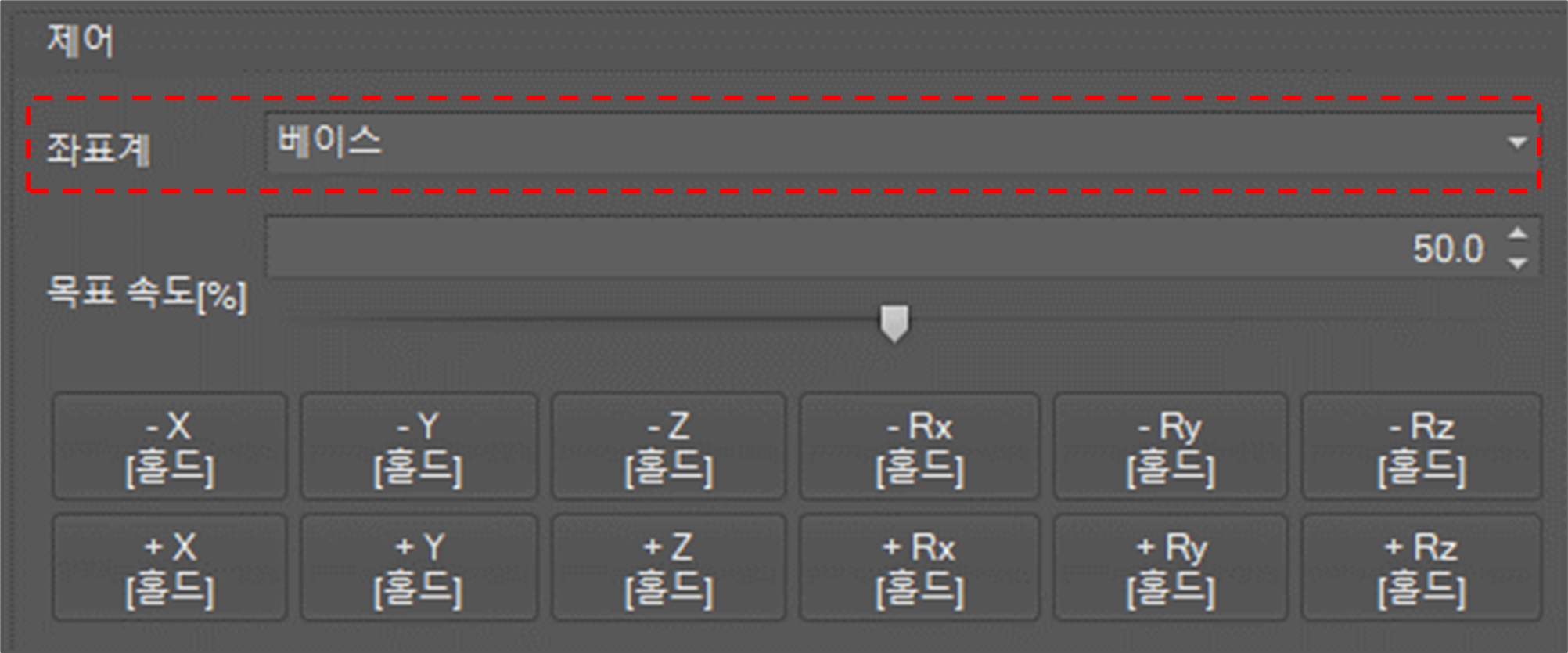
조그 모드 설정
베이스, 툴, 월드 그리고 사용자_좌표계 4가지 조그 모드가 있습니다.
- 베이스: 로봇 TCP 가 베이스 좌표의 해당 축을 따라 이동합니다.
- 툴: 로봇의 TCP 가 툴 좌표의 해당 축을 따라 이동합니다.
- 월드: 로봇의 TCP 가 월드 좌표의 해당 축을 따라 이동합니다.
- 사용자_좌표계: 로봇의 TCP 가 로봇환경설정을 통해 추가한 좌표의 해당 축을 따라 이동합니다.
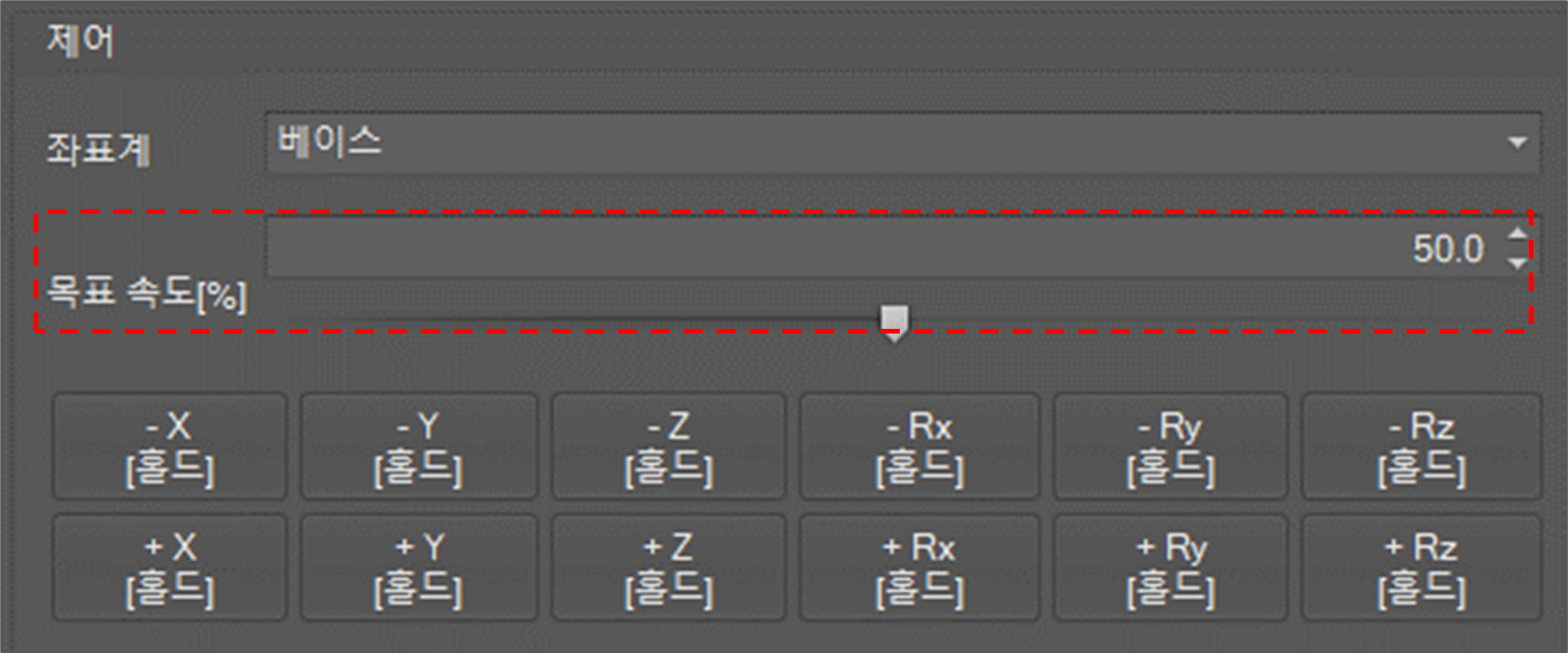
조그 속도 설정
조그 속도는 퍼센트 단위로 설정됩니다. 100 %의 태스크 조그 속도는 250 mm/second입니다. 속도를 설정하려면 스핀 버튼을 누르거나 슬라이드 바를 움직이십시오.
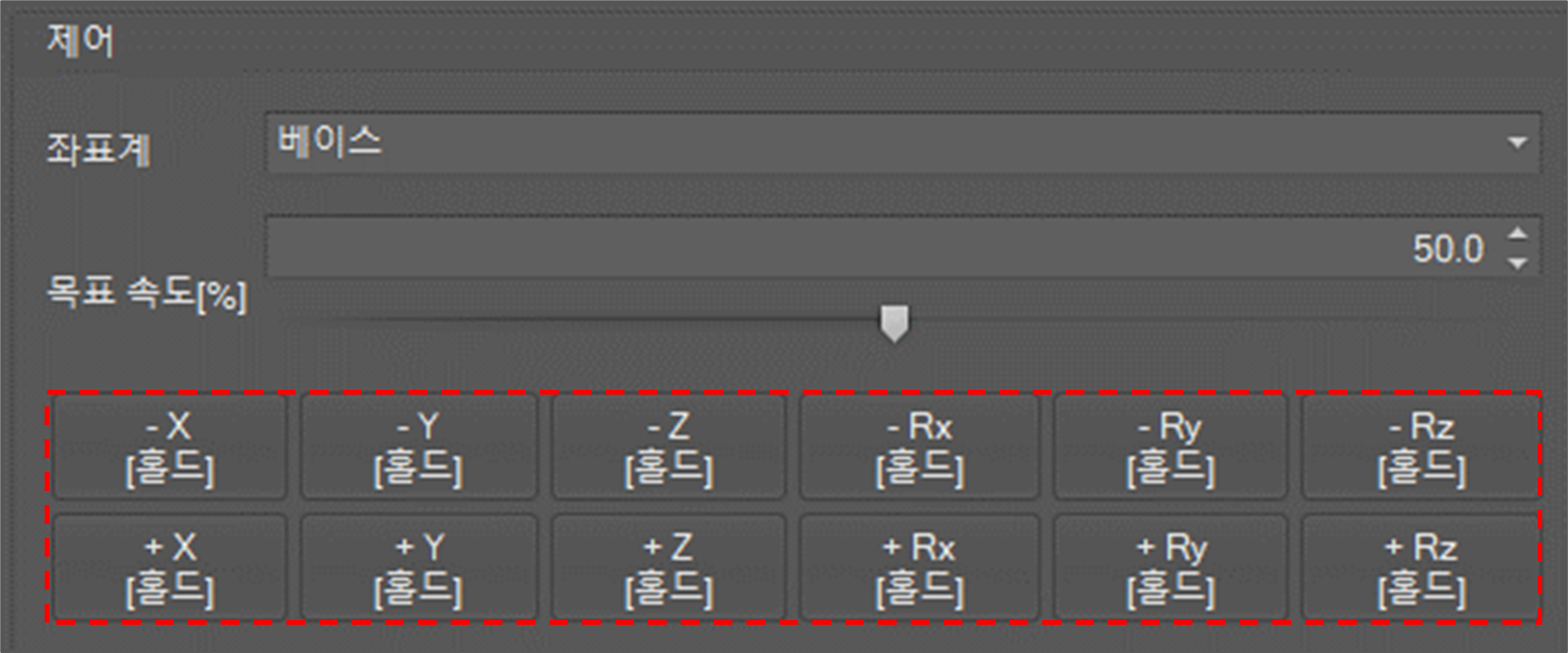
동작 시작
이동할 축과 이동할 방향에 대한 플러스(+) 또는 마이너스(-) 버튼을 이용하십시오. 버튼을 놓으면 동작은 멈춥니다.