스크립트 생성하기
스크립트 생성
생성된 경로로부터 DRL 스크립트를 생성합니다.
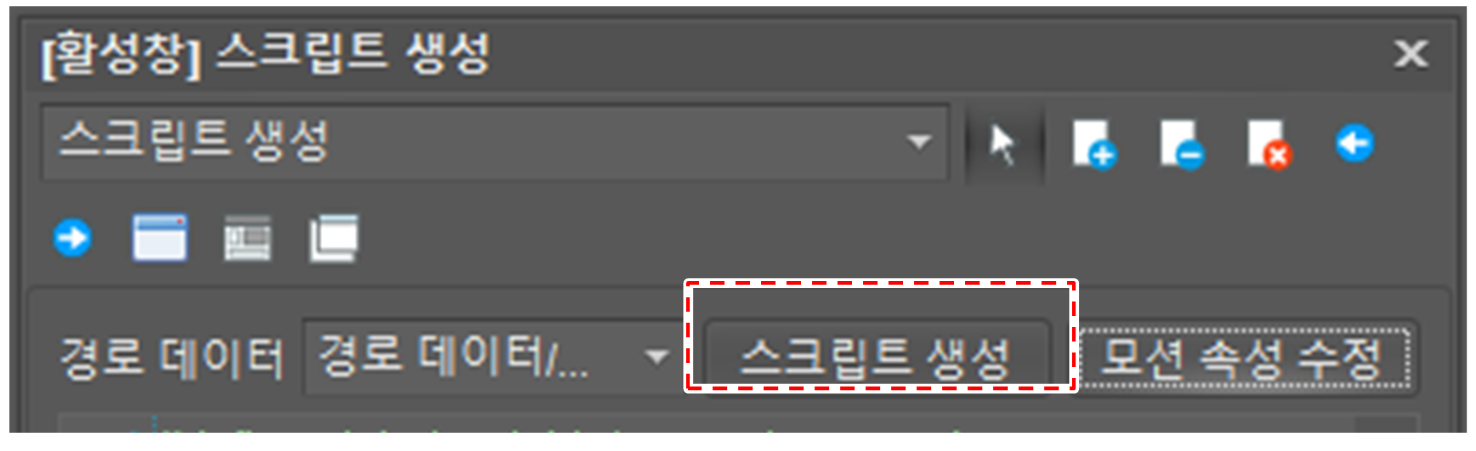
- 메뉴에서 스크립트 생성 버튼을 클릭하십시오.

- 스크립트를 생성할 경로 데이터를 선택합니다.

모션 속성을 설정합니다.
모션 속성 수정 버튼을 클릭하고, 팝업창에서 값을 설정하세요.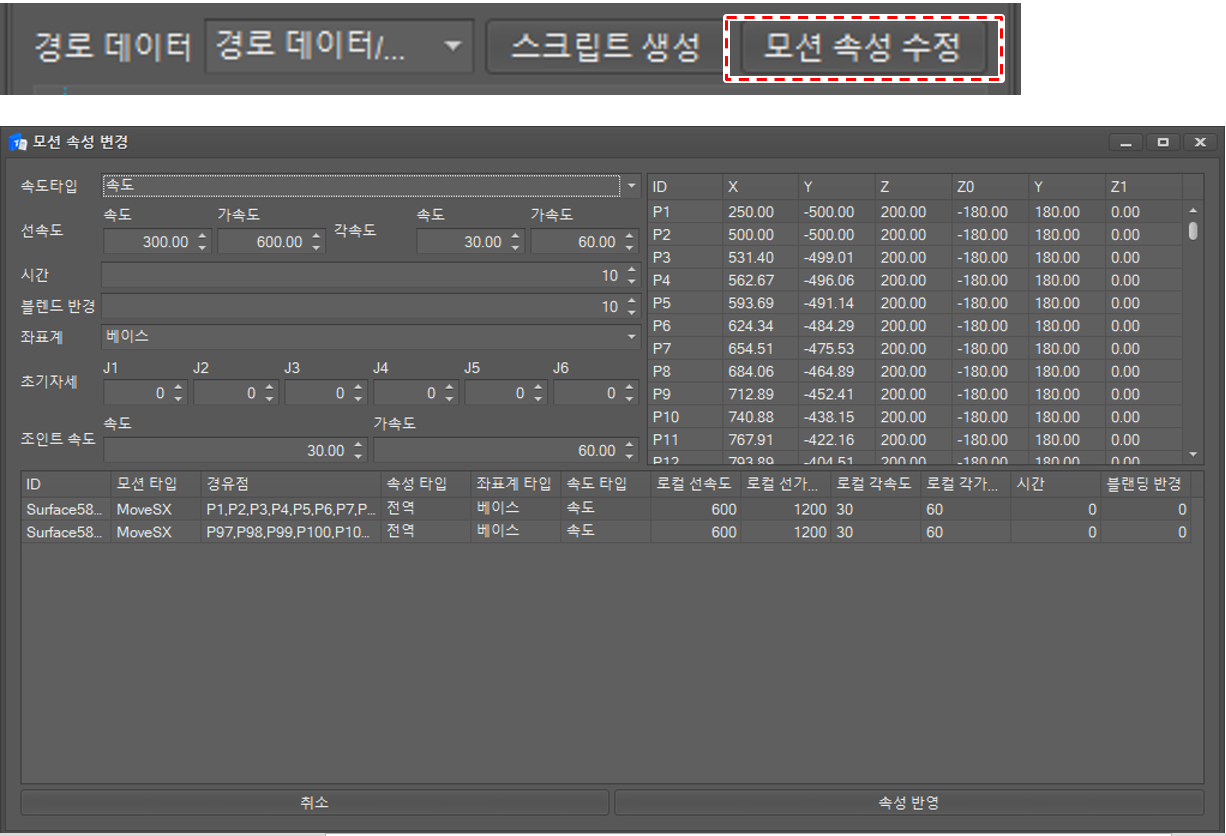
각 모션은 다음과 같은 속성을 가집니다.속도 타입
모션의 속도 타입을 의미합니다. 일반적인 모션은 속도와 가속도로 속도를 결정하지만, 작업의 완료 시간을 기준으로 속도를 결정할 수 있습니다.
선속도/각속도
속도 타입이 “속도”인 경우, 모션의 선속도, 선가속도, 각속도, 각가속도를 정의합니다.
시간
속도 타입이 “시간”인 경우, 모션의 완료 시간으로 속도를 결정합니다. 단위는 초입니다.
좌표계
모션의 경유점의 좌표계를 설정합니다. 월드 또는 베이스로 설정합니다.
블렌드 반경
모션과 모션 사이에 블렌딩할 경우에 적용할 반지름 값을 정의합니다. 값이 0이면 블렌딩되지 않습니다.
한 개의 경로 세그먼트는 한 개의 모션이 됩니다. 각 모션의 속성은 글로벌 속성을 따르거나 개별적으로 설정할 수도 있습니다. 모션 별로 개별적인 속성을 설정하려면, 속성 타입을 “로컬”로 변경 후 각 속성 값을 설정합니다.
글로벌 속성은 다음 UI에서 변경 가능합니다.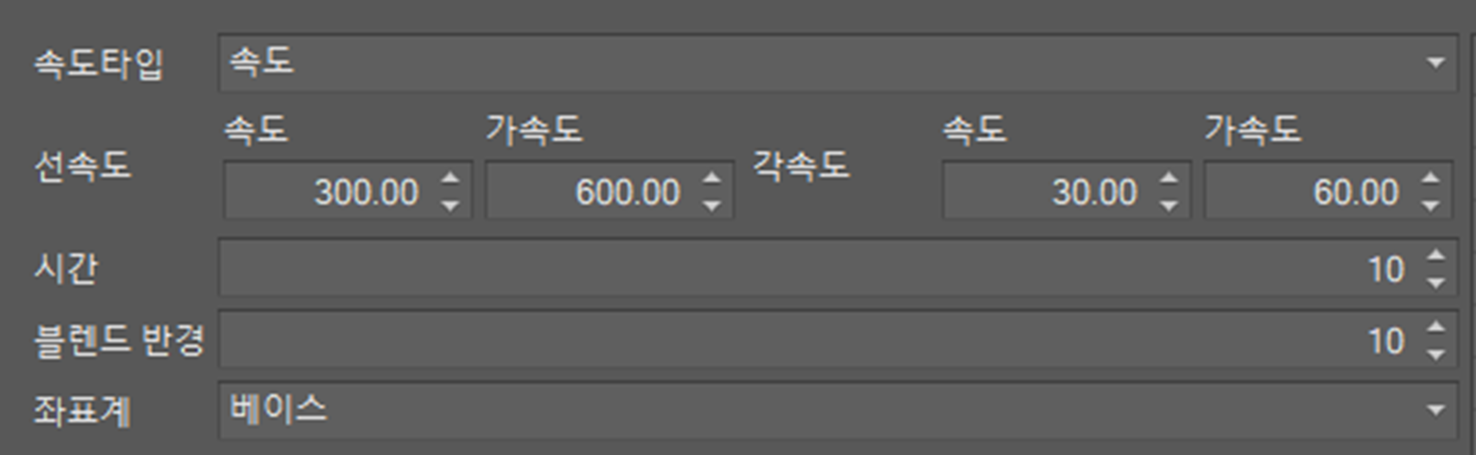
최초 작업 위치 이동을 위한 조인트 각도와 속도 설정이 가능합니다.
수정이 완료되면 속성 반영 버튼을 클릭합니다. 속성 반영을 해야 수정 내용이 스크립트에 반영됩니다.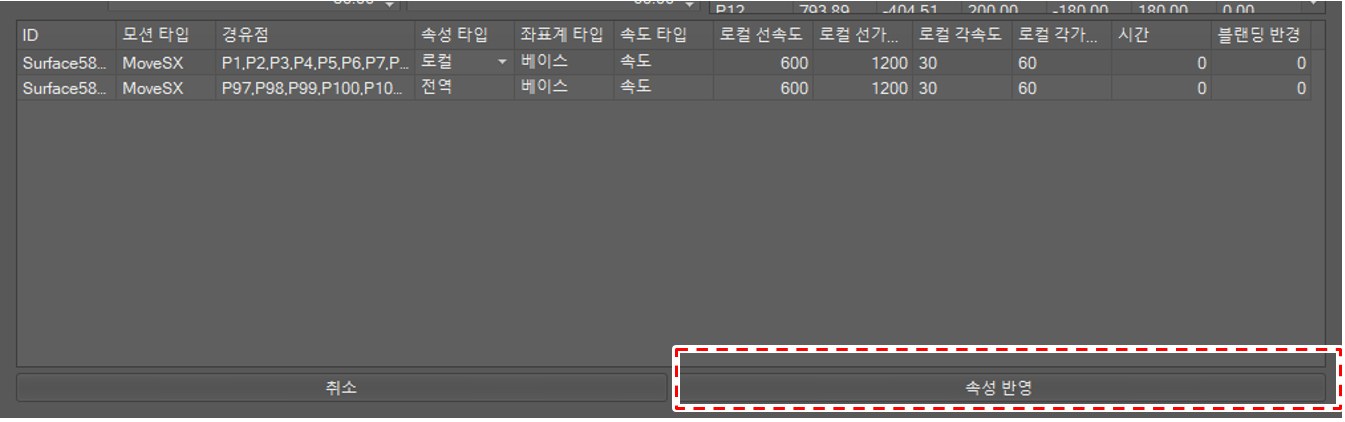
스크립트를 생성합니다.
스크립트 생성을 실행하면 코드가 생성됩니다.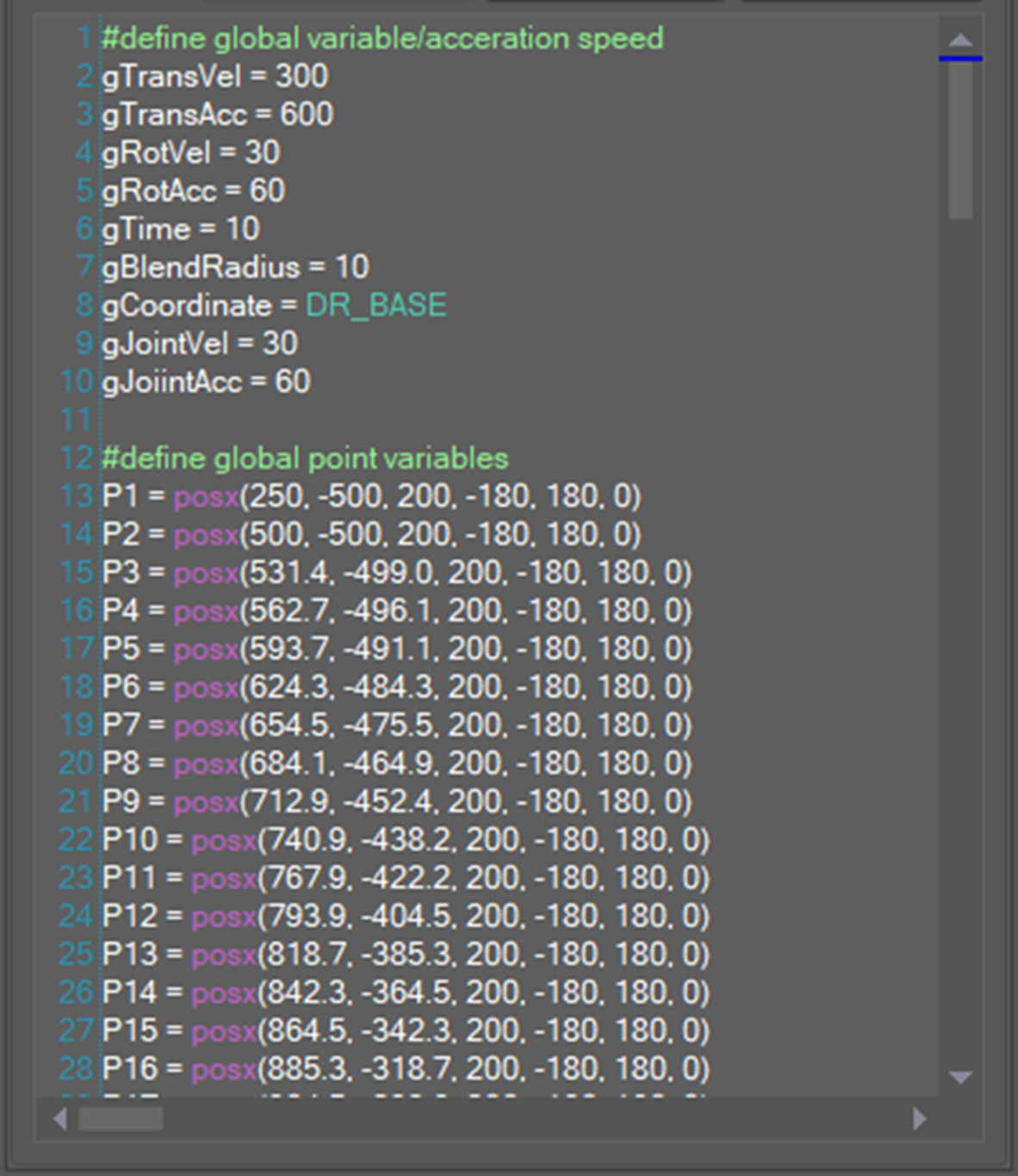
생성된 코드는 복사&붙여넣기를 이용하여 DRL 프로젝트에 복사하여 활용합니다.
알아두기
다음과 같은 경우 스크립트 생성이 실패할 수 있습니다.
- 스플라인 모션의 경유점이 100개를 초과하는 경우: 스플라인 모션은 경유점의 개수를 100개로 제한하고 있습니다. 만약 경유점이 100개를 초과하면 해당 경로 세그먼트의 경유점의 수를 줄이거나 경로 세그먼트를 분할해야 합니다.
- 블렌드 모션의 자식 세그먼트의 수가 100개를 초과하는 경우: 블렌드 모션은 자식 세그먼트의 수를 100개로 제한하고 있습니다. 만약 자식 세그먼트의 수가 100개를 초과하면 해당 경로 세그먼트의 자식 세그먼트 수를 줄이거나 경로 세그먼트를 분할해야 합니다.
- 블렌드 모션의 자식 세그먼트가 직선이나 원호가 아닌 경우: 블렌드 모션의 자식 세그먼트는 직선이나 원호여야 합니다. 만약 그렇지 않은 세그먼트가 있다면, 세그먼트 타입을 수정해야 합니다.
스크립트 가상 실행
생성된 스크립트를 가상 실행하고, 로봇의 모션 및 경로 궤적을 확인할 수 있는 기능을 제공합니다.
- 프로그램을 제어기에 접속하거나 에뮬레이터를 실행하십시오.
- 생성된 스크립트를 DRL 프로젝트 탐색기로 복사 붙여 넣으십시오.
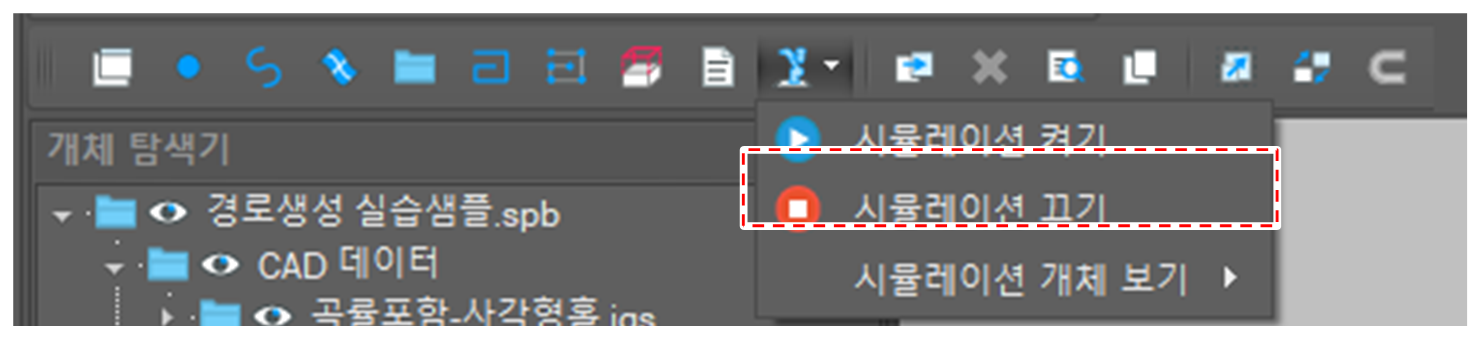
- 메뉴에서 시뮬레이션 켜기 버튼을 클릭하십시오.
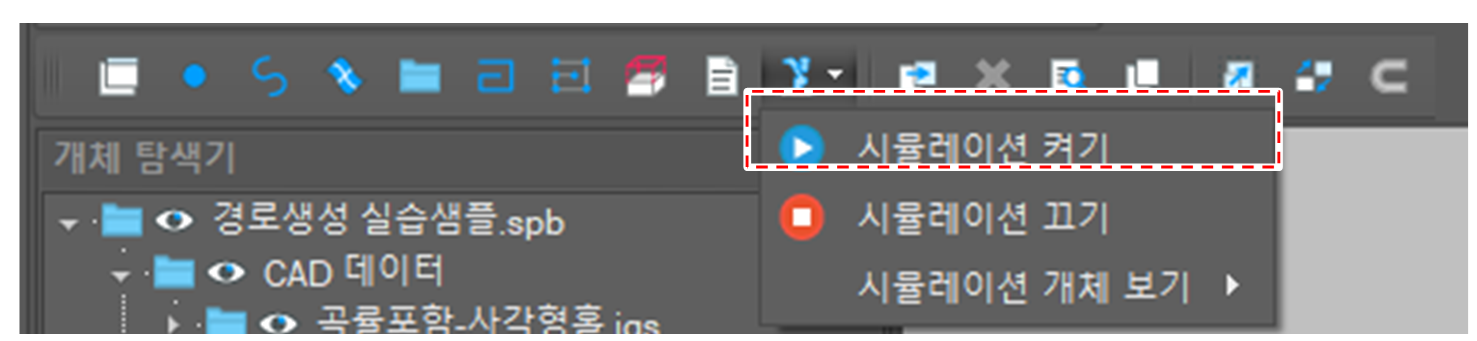
만약 제어기나 에뮬레이터에 문제없이 연결되었다면, 현재 연결된 로봇의 로봇 형상이 표시됩니다.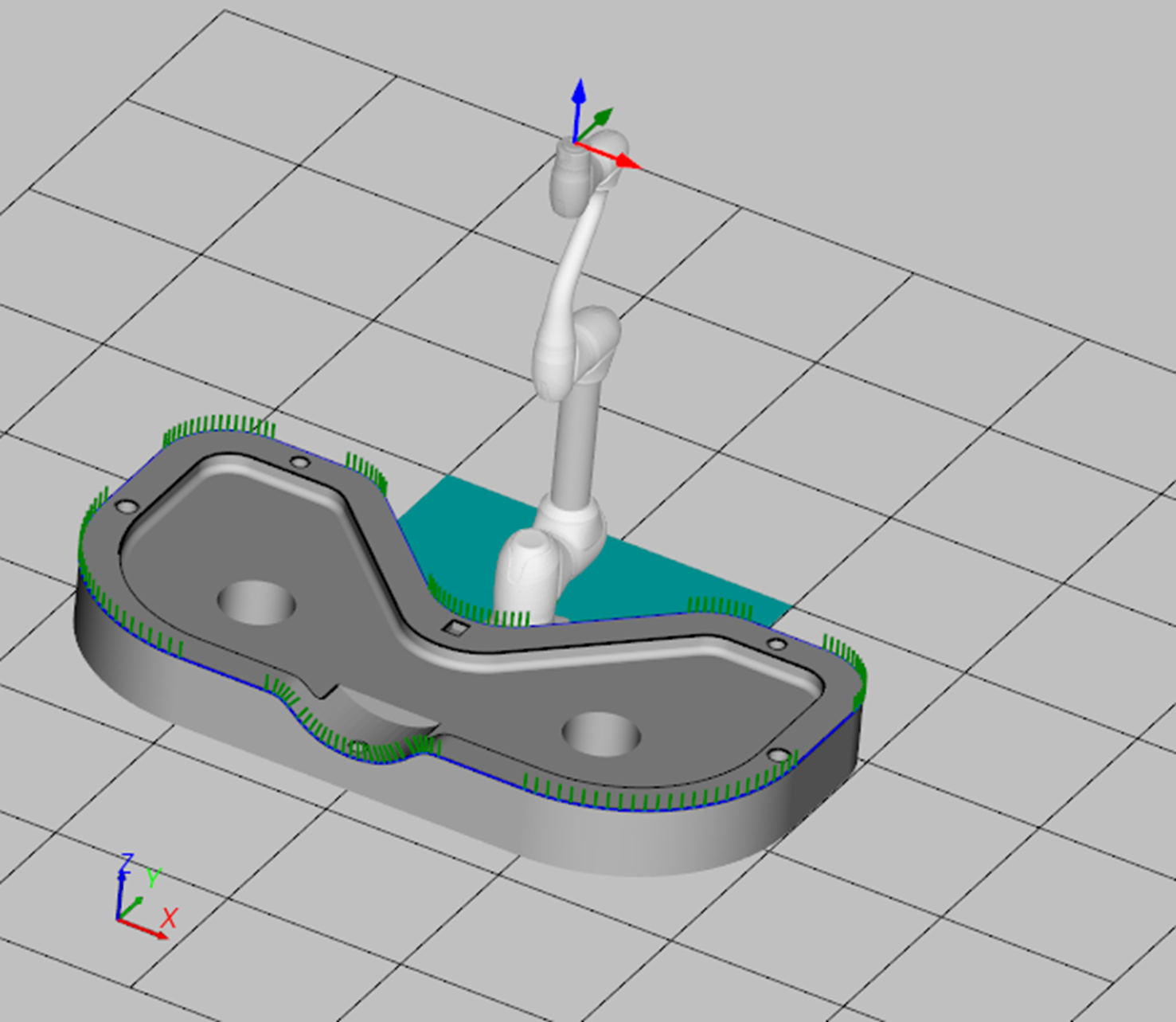
- DRL 프로젝트 탐색기에서 프로그램을 실행하십시오.
프로그램이 시작되면, 로봇의 모션과 함께 작업 경로의 궤적이 표시됩니다.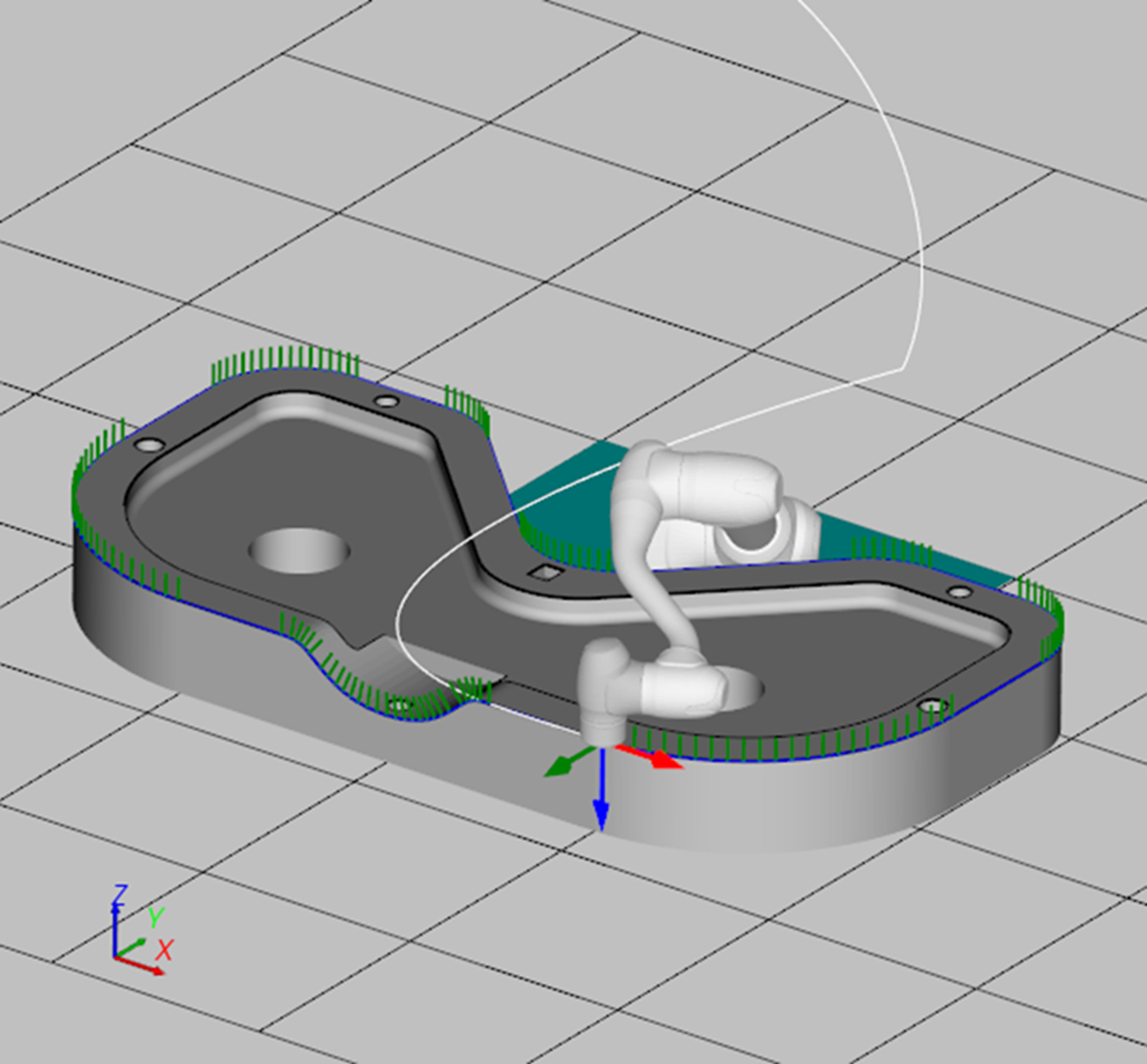
- 시뮬레이션이 완료되면 시뮬레이션 끄기 버튼을 클릭합니다.