
안전 파라미터
조인트 제한값
- 조인트 각도 제한값: 조인트 각도의 제한입니다. 축 각도가 한계를 초과하면 조인트 각도 제한 (JOINT_SLP) 위반 오류가 발생합니다.
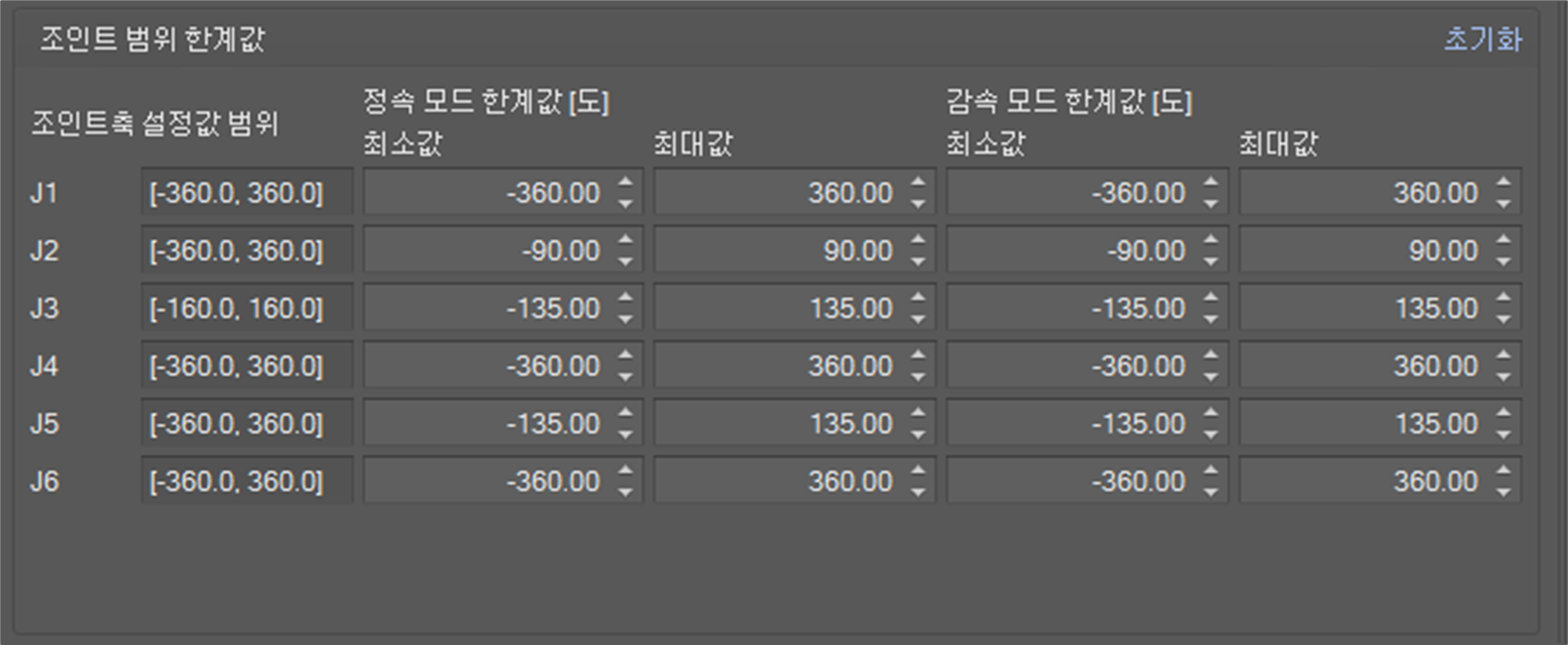
- 조인트 속도 제한값: Degree/Sec 단위의 조인트 속도 제한입니다. 축 속도가 한계를 초과하면 조인트 속도 제한 (JOINT_SLS) 위반 오류가 발생합니다.
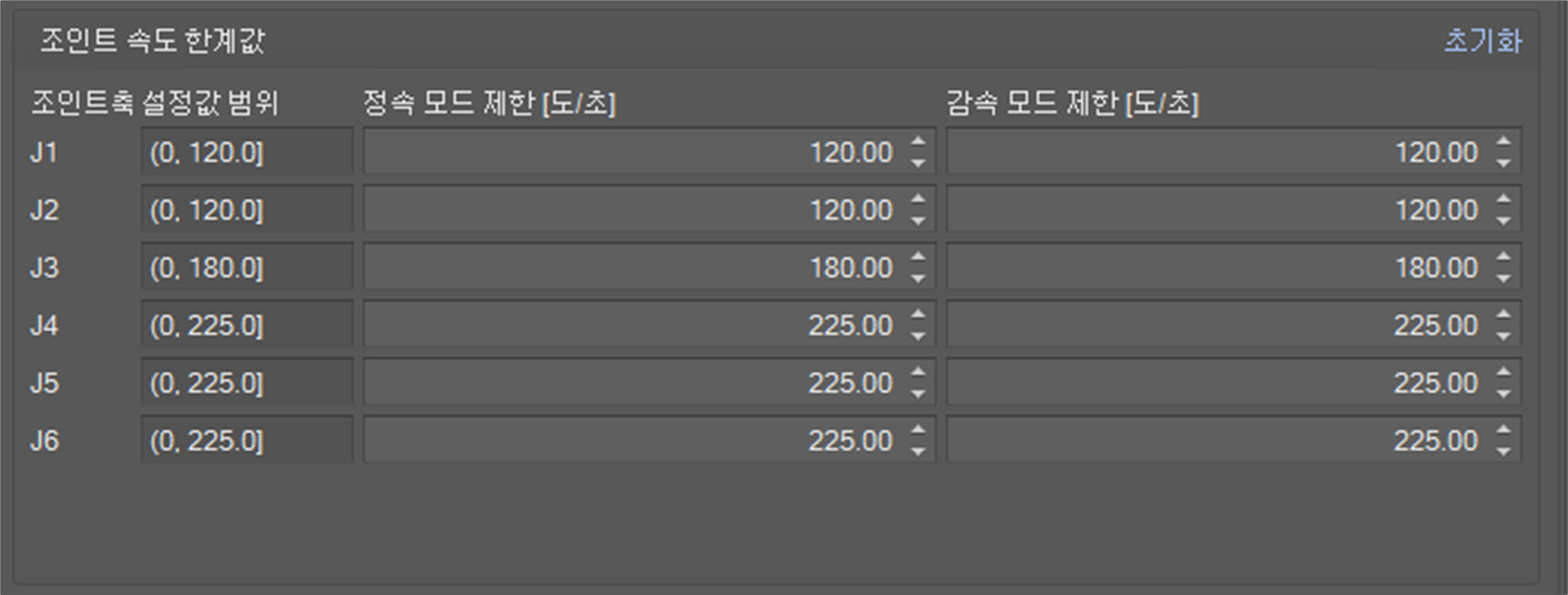
정속 모드와 감속 모드를 위한 각각의 제한 설정이 필요합니다.
정속 모드 제한은 로봇이 자율 동작 상태일 때 적용됩니다.
감속 속도 모드 제한은 수동 동작, 교시 동작 상태이거나 자율 동작 중 안전 입력에 의해 감속 모드가 되었을 때 적용됩니다.
TCP/로봇 제한 값
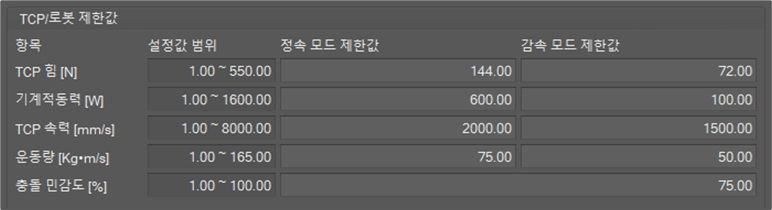
- TCP 힘: N 단위의 TCP에 대한 외력 제한입니다. TCP 상의 외력이 한계를 초과하면 TCP 힘 제한 (TCP_SLF) 위반 오류가 발생합니다.
- 기계적 동력: 와트(W) 단위의 기계적 동력 제한입니다. 동력 값이 한계를 초과하면, 기계적 동력 제한 (POWER) 위반 오류가 발생합니다.
- TCP 속력: mm/sec 단위의 TCP 속력 제한입니다. TCP 속력 제한이 한계를 초과하면, TCP 속력제한 (TCP_SLS) 위반 오류가 발생합니다.
- 운동량: Kg∙m/sec 단위의 운동량 제한입니다. 운동량 값이 한계를 초과하면, 운동량 제한 (MOMENTUM) 위반 오류가 발생합니다.
- 충돌 민감도: 퍼센트 단위의 충돌 감시 기준입니다. 값이 클수록 로봇은 작은 외력으로 멈춥니다. 충돌이 감지되면, 충돌 감지 (COLLISION) 오류가 발생합니다.
정속 모드와 감속 모드를 위한 각각의 제한 설정이 필요합니다.
정속 모드 제한은 로봇이 자율 동작 상태일 때 적용됩니다.
감속 속도 모드 제한은 수동 동작, 교시 동작 상태이거나 자율 동작 중 안전 입력에 의해 감속 모드가 되었을 때 적용됩니다.
안전 정지 모드
각 안전 위반에 대한 정지 모드를 지정할 수 있습니다.
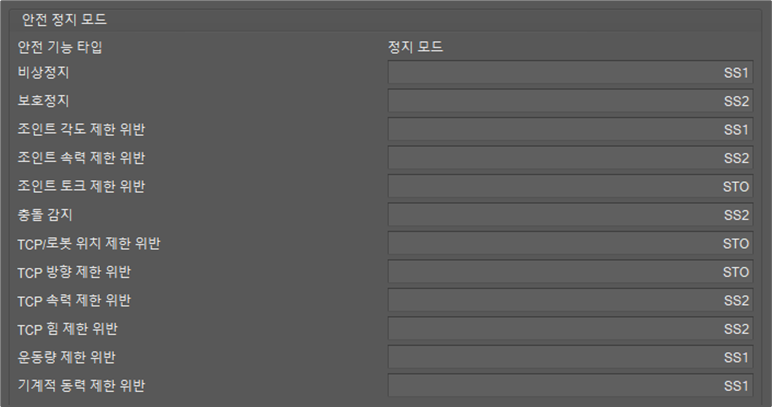
4가지 종류의 정지 모드가 있습니다.
- STO: 모터 전원을 즉시 차단합니다.
- SS1: 모션 정지 후 모터 전원을 차단합니다.
- SS2: 모션 정지 후 위치를 유지합니다.
- RS1: 충돌 후 반응 성 정지. 충돌 위반에 대해서만 적용할 수 있습니다.
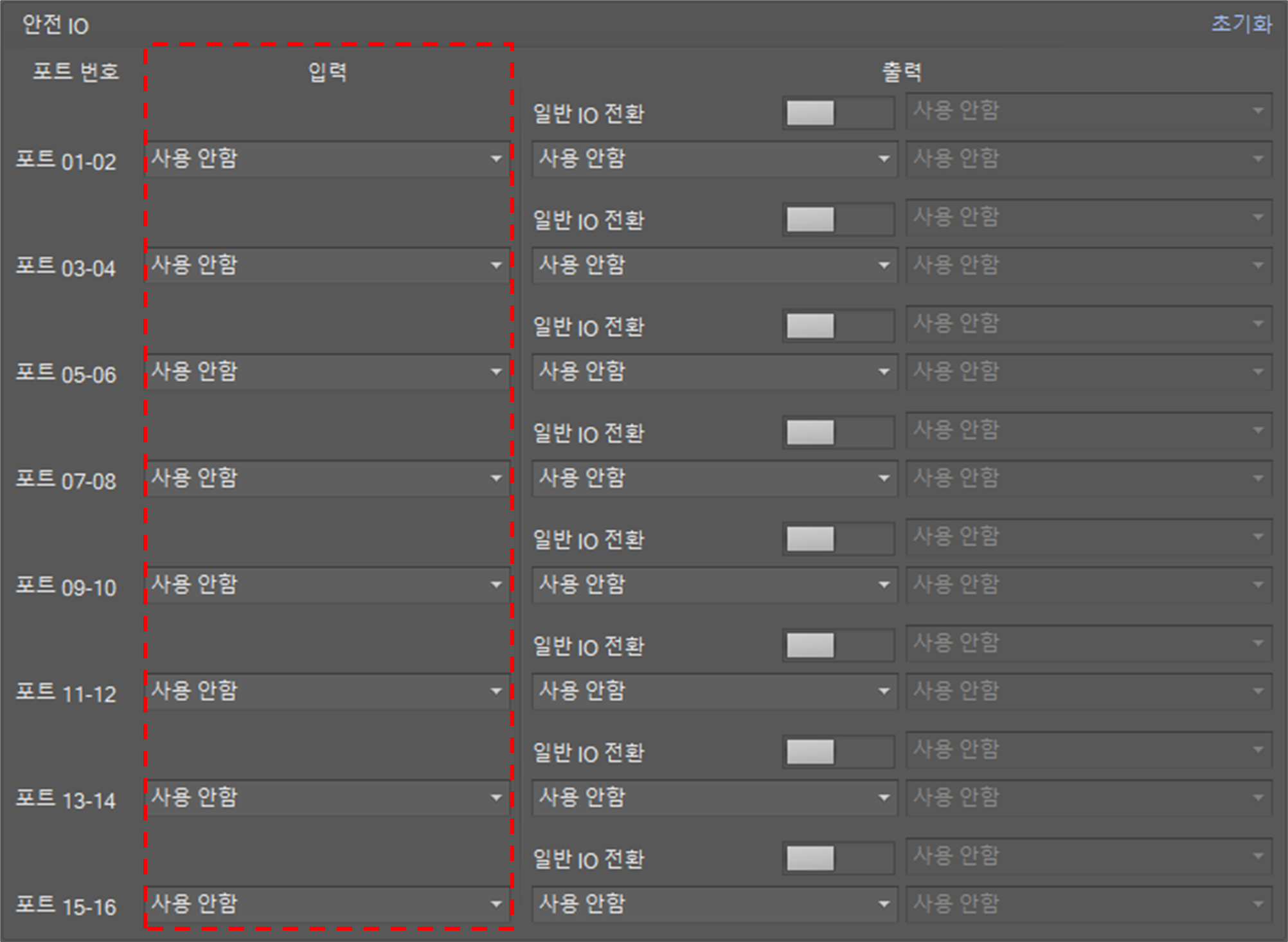
안전 IO - 안전 입력
안전 입력은 일치하는 신호가 발생했을 때의 로봇 동작을 정의합니다.
가능한 옵션은 다음과 같습니다.
0 | 사용 안함 |
1 | Emergency Stop (L) |
2 | Emergency Stop - No Loopback (L) |
3 | Protective Stop (L) |
4 | Protective Stop - STO (L) |
5 | Protective Stop - SS1 (L) |
6 | Protective Stop - SS2 (L) |
7 | Protective Stop (L) - Auto Reset & Resume (R) |
8 | Interlock Reset (R) |
9 | Reduced Speed Activation (L) |
10 | 3-Pos Enable Switch (H) |
11 | Handguiding Enable Switch (H) |
12 | Remote Control Enable (H) |
13 | Safety Zone Dynamic Enable (H) |
14 | Safety Zone Dynamic Enable (L) |
15 | HGC End & Task Resume (R) |
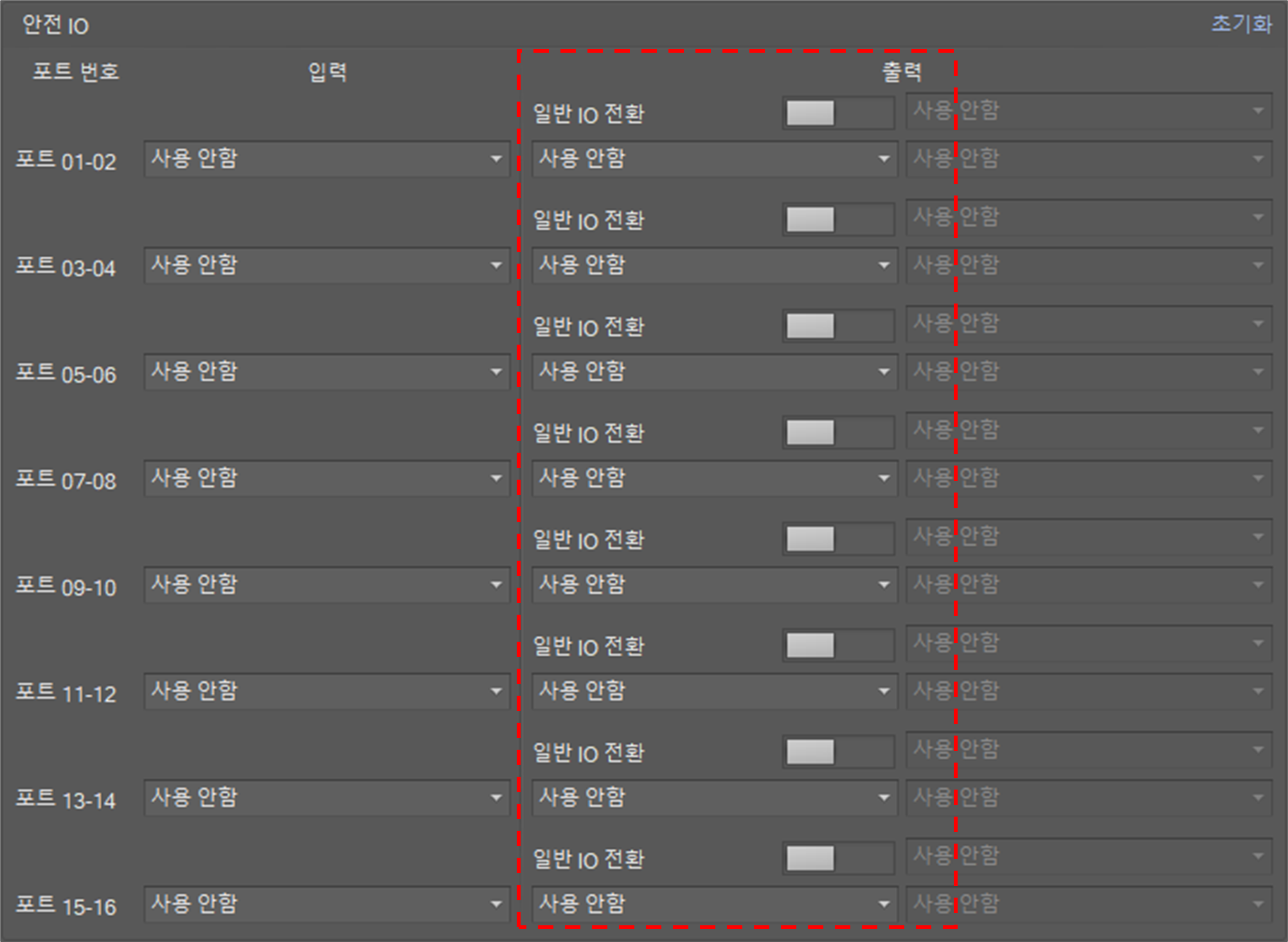
안전 IO - 안전 출력
구성된 안전 출력 동작이 발생하면 해당 안전 출력 채널로 신호가 호출됩니다.
가능한 옵션은 다음과 같습니다.
0 | 사용 안함 |
1 | Emergency Stop (L) |
2 | Emergency Stop - excl. No Loopback Input (L) |
3 | Safe Torque Off (L) |
4 | Safe Operating Stop (L) |
5 | Abnormal (L) |
6 | Normal Speed (L) |
7 | Reduced Speed (L) |
8 | Auto Mode (L) |
9 | Manual Mode (L) |
10 | Remote Control Mode (L) |
11 | Standalone Zone (L) |
12 | Collaborative Zone (L) |
13 | High Priority Zone (L) |
14 | Tool Orientation Limit Zone (L) |
15 | Designated Zone (L) |
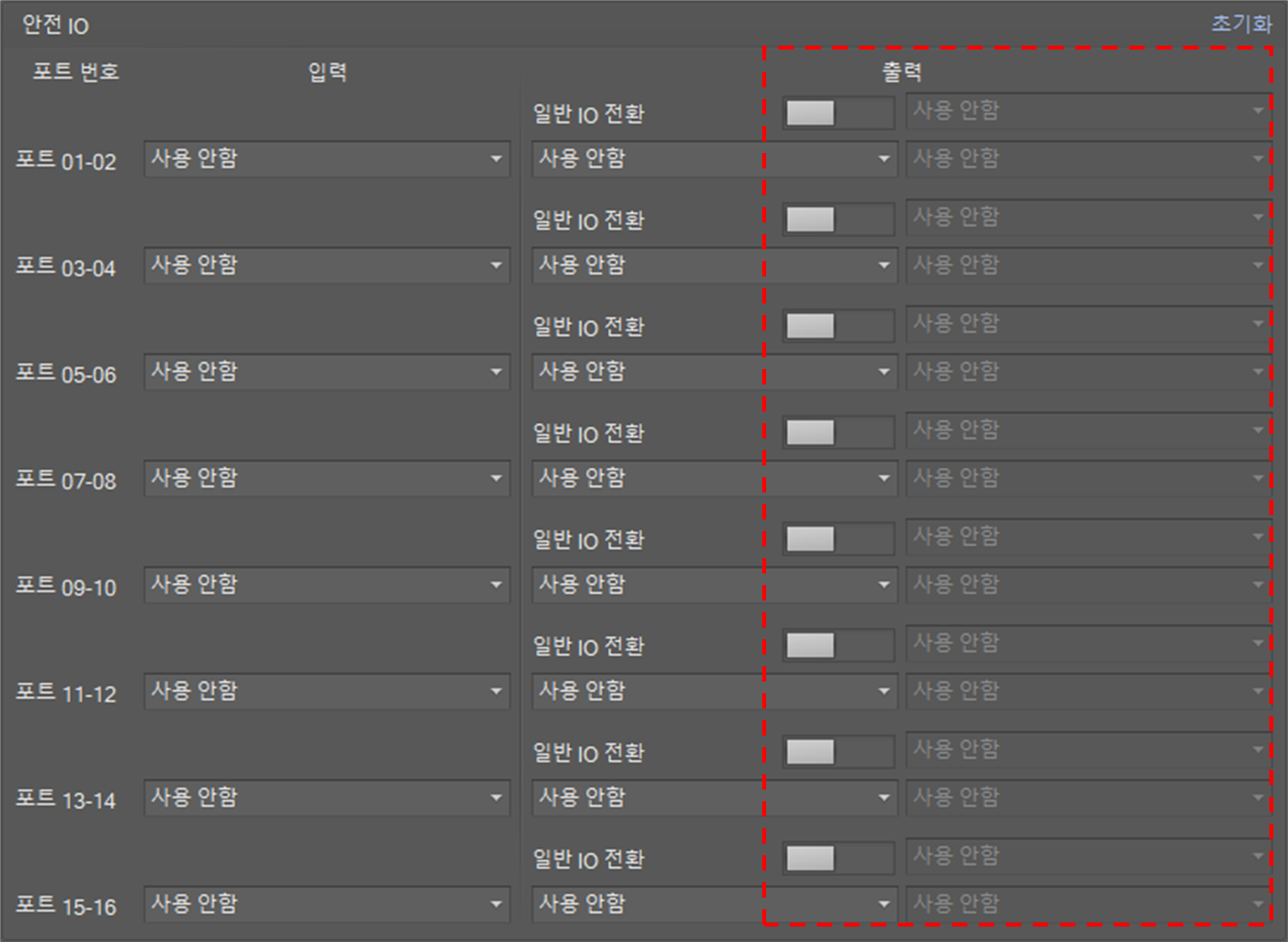
안전 IO - 일반 출력
안전 출력을 일반 출력으로 전환할 수 있습니다.
구성된 일반 출력 동작이 발생하면 해당 일반 출력 포트로 신호가 호출됩니다.
가능한 옵션은 다음과 같습니다.
0 | 사용 안함 |
1 | Safe Torque Off (L) |
2 | Safe Operating Stop (L) |
3 | Normal Speed (L) |
4 | Reduced Speed (L) |
5 | Auto Mode (L) |
6 | Manual Mode (L) |
7 | Remote Control Mode (L) |
8 | Standalone Zone (L) |
9 | Collaborative Zone (L) |
10 | High Priority Zone (L) |
11 | Tool Orientation Limit Zone (L) |
12 | Designated Zone (L) |
13 | Task Operating (L) |
14 | Robot In Motion (L) |
15 | Mastering Alarm (L) |
16 | Home Position (L) |
17 | Deceleration - SS1 SS2 (L) |
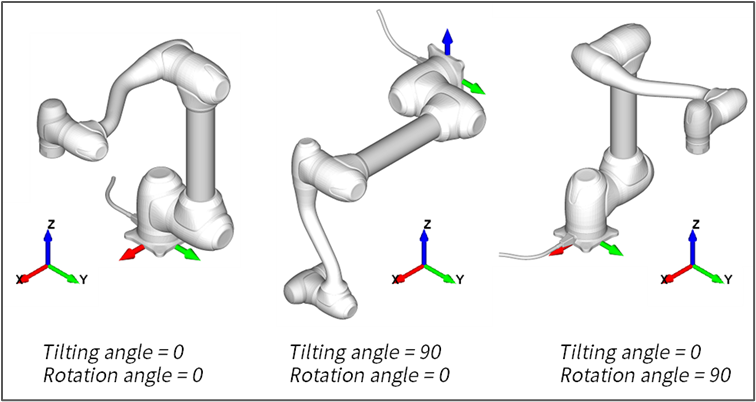
설치 자세
로봇이 측벽 또는 천장에 장착된 경우 설치 자세를 설정해야 합니다.

- 기울기 각도: 지면과 로봇베이스 프레임 사이의 기울기 각도.
- 회전 각도: 세로축을 따른 회전 각도.
콕핏 버튼
콕핏 버튼의 티칭 모드를 설정하는 기능을 제공합니다.

티칭모드는 다음과 같습니다.
- 자유 방향
- Z방향 고정
- XY면 고정
- 위치 고정
- 방향 고정
협착탈출 기능을 사용하려면 버튼1+2모드에 협착탈출 활성화를 선택합니다.
속도 감속률
다음과 같은 속성 항목을 설정하는 편집 기능을 제공합니다
항목 | 범위 | 단위 |
협동 작업 공간 속도 감속률 | 1~100 | % |
안전 IO 속도 감속률 | 1 ~100 | % |
주의
제어기 2.5 버전(GF020500)부터는 협동 작업 공간 속도 감속률 설정 항목이 제거됩니다. 안전 영역에서 개별적으로 속도 감속률을 설정할 수 있기 때문입니다.
넛지
넛지에 대한 다음 속성 항목을 설정하는 편집 기능을 제공합니다.
항목 | 범위 | 단위 |
입력 힘 | 10~50 | N |
지연 시간 | 0 ~30 | Sec |
유휴시간 서보 종료
유효 시간 서보 종료는 우리 시스템의 안전 정책 중 하나입니다. 만약 로봇을 5분 이상 사용하지 않으면 서보 전원이 차단됩니다. 만약 이러한 기능을 원하지 않으면 서보 꺼짐 허용 설정을 해제하십시오.
유효 시간 서보 종료의 시간만 변경하려면 꺼짐 시간을 변경하십시오.
