
안전 영역 개요 (제어기 버전 GF020500부터 유효)
기존의 안전 영역은 공간 제한 영역과 로컬 속성 재정의 영역으로 통합되었습니다.
공간 제한 영역
공간 제한 영역은 로봇의 동작을 제한하는 영역입니다. 기존의 동작 공간과 침범 금지 구역을 통합하였습니다.
영역은 구, 원기둥, 사각기둥, 기울어진 사각기둥, 다면 기둥 중 하나로 정의할 수 있습니다. 형상 타입 별 속성은 다음과 같습니다.
형상 타입 | 형상 이미지 | 속성 |
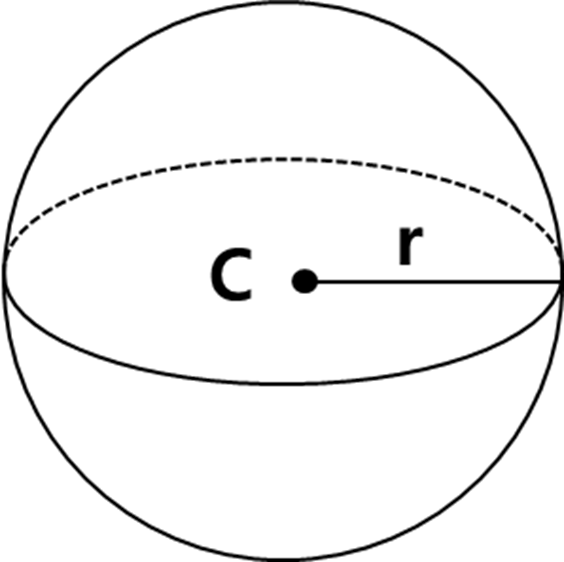
구 |
| C: 중심점 (X,Y,Z) r: 반지름 |
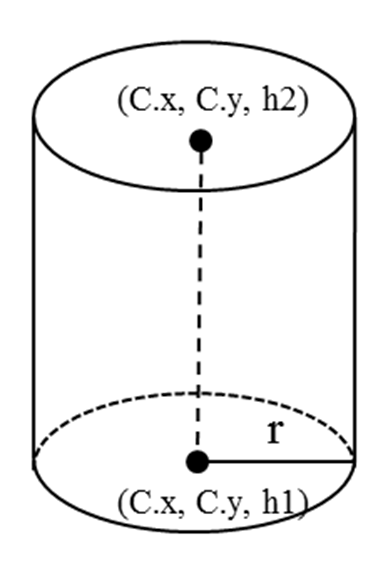
원기둥 |
| C: 중심점 (X,Y) r: 반지름 h1: 밑면 높이 (Z) h2: 윗면 높이 (Z) |
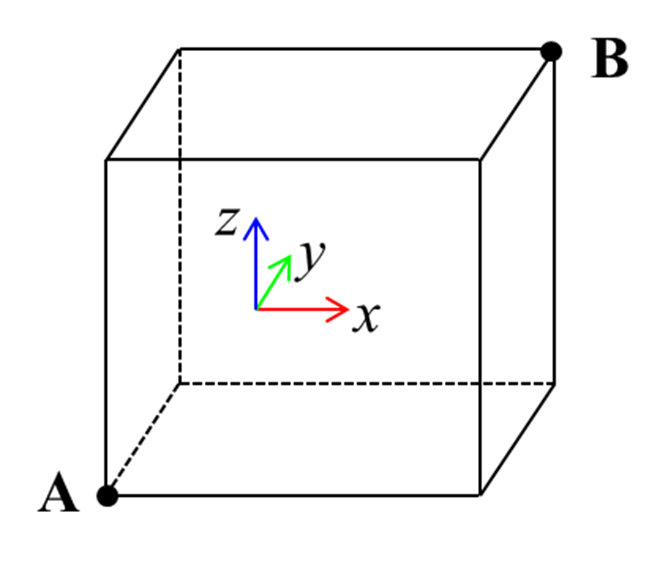
사각기둥 |
| A: 꼭지점1 (X,Y,Z) B: 꼭지점2 (X,Y,Z) |
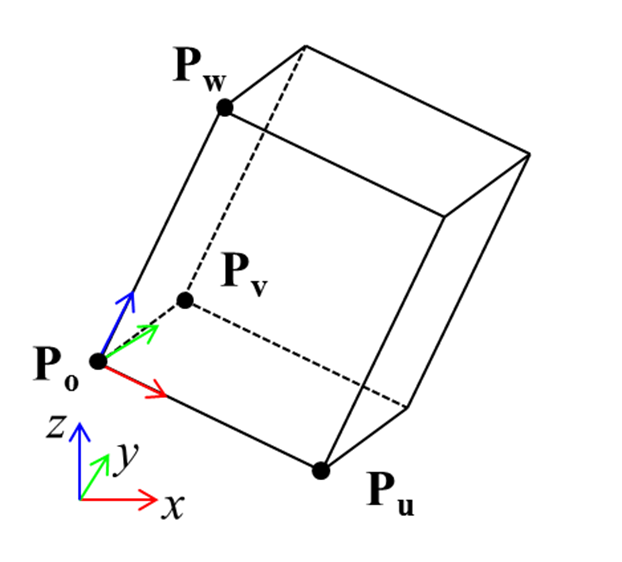
기울어진 사각기둥 |
| 기울어진 사각기둥은 중심점과 3개의 직교하는 축(U,V,Z축)으로 정의된다. Po: 원점 꼭지점 (X,Y,Z) Pu: U축 꼭지점 (X,Y,Z) Pv: V축 꼭지점 (X,Y,Z) Pw: W축 꼭지점 (X,Y,Z) |
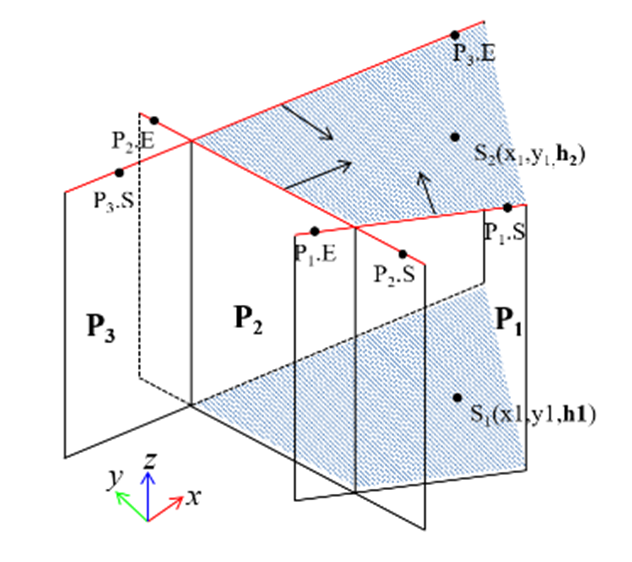
다면기둥 |
| P1~P6: XY 평면에 수직인 면, 2차원 상에서 시작점과 끝점으로 정의 h1: 밑면 높이 (Z) h2: 윗면 높이 (Z) S: 공간점 (X,Y), 분할된 영역 중 유효한 영역을 결정하는 점 |
형상은 공통적으로 다음과 같은 속성을 갖습니다.
속성 | 설명 |
좌표계 | 좌표의 기준 좌표계를 정의합니다. 베이스 좌표계 또는 월드 좌표계를 선택할 수 있습니다. |
유효공간 | 정의된 형상이 만드는 공간을 내부 공간, 그 나머지 공간을 외부 공간이라고 합니다. 형상이 만드는 공간 중에서 어느 공간이 유효한 지를 정의합니다. 외부 공간이 유효 공간이면, 외부 영역이 유효한 동작 공간으로서 로봇은 정의된 형상 내부에 침범할 수 없다는 뜻이 됩니다. 즉 기존의 침범 금지 영역을 의미합니다. |
형상 마진 | 형상이 만드는 내부 공간을 일률적으로 확대 또는 축소하기 위한 값입니다. 내부 공간은 값이 양수이면 확대되고, 음수이면 축소됩니다. |
영역의 속성은 다음과 같습니다.
속성 | 설명 |
검사 타입 | 로봇이 정의된 공간 제한 영역을 벗어나는 지 검사하기 위한 기준을 정의합니다. 몸체: 내부적으로 정의된 로봇 형상 및 사용자가 정의한 툴 형상이 검사 대상이 됩니다. TCP: 로봇의 TCP 좌표가 검사 대상이 됩니다. |
조인트 각도 제한값 재정의 | 조인트 각도 제한 검사 기준을 재정의할지 여부를 결정합니다. 만약 재정의하면 영역 안에서는 재정의된 검사 기준이 적용됩니다. |
안전 입력 기반 동적 활성화 | 안전 영역을 안전 입력 신호에 기반하여 활성화할 지 여부를 결정합니다. 만약 안전 입력 채널이 정의되면, 해당 안전 영역은 정의된 안전 입력 채널의 신호가 인가될 때 활성화됩니다. |
안전 출력 기반 동적 활성화 | 안전 영역을 안전 출력 신호에 기반하여 활성화할 지 여부를 결정합니다. 만약 안전 출력 채널이 정의되면, 해당 안전 영역은 정의된 안전 출력 채널의 신호가 인가될 때 활성화됩니다. |
로컬 속성 재정의 영역
로컬 속성 재정의 영역은 정의된 형상 영역 안에서 안전 파라미터에서 정의한 전역 속성을 재정의하여 적용하기 위한 영역입니다.
영역은 구, 원기둥, 사각기둥, 기울어진 사각기둥, 다면 기둥 중 하나로 정의할 수 있고, 형상의 타입과 속성은 공간 제한 영역과 동일합니다.
영역 안에서 재정의 가능한 속성은 다음과 같습니다.
속성 | 설명 |
타 영역에 우선 | 안전 영역이 겹치는 위치에서 어느 영역의 검사 기준을 따를 지를 정하기 위한 플래그입니다. 이 플래그가 설정되면, 현재 영역의 설정값이 설정되지 않은 영역에 우선하게 됩니다. |
감속 모드에 우선 | 안전 입력에 의해 감속 동작 모드가 되면, 로컬 안전 영역의 제한값과 글로벌 감속 모드 제한값 중 안전한 값이 검사 기준이 됩니다. 이 플래그를 설정하면 로컬 영역 제한값이 감속 모드 제한값에 우선하여 검사 기준값이 됩니다. |
조인트 각도 제한값 재정의 | 조인트 각도 제한 검사 기준을 재정의할지 여부를 결정합니다. 만약 재정의하면 영역 안에서는 재정의된 검사 기준이 적용됩니다. |
조인트 속도 제한값 재정의 | 조인트 속도 제한 검사 기준을 재정의할지 여부를 결정합니다. 만약 재정의하면 영역 안에서는 재정의된 검사 기준이 적용됩니다. |
TCP 속도 제한값 재정의 | TCP 속도 제한 검사 기준을 재정의할지 여부를 결정합니다. 만약 재정의하면 영역 안에서는 재정의된 검사 기준이 적용됩니다. |
파워(Power) 제한값 재정의 | 파워(Power) 제한 검사 기준을 재정의할지 여부를 결정합니다. 만약 재정의하면 영역 안에서는 재정의된 검사 기준이 적용됩니다. |
모멘텀 (Momentum) 제한값 재정의 | 모멘텀(Momentum) 제한 검사 기준을 재정의할지 여부를 결정합니다. 만약 재정의하면 영역 안에서는 재정의된 검사 기준이 적용됩니다. |
TCP 외력 (Force) 제한값 재정의 | TCP 외력(Force) 제한 검사 기준을 재정의할지 여부를 결정합니다. 만약 재정의하면 영역 안에서는 재정의된 검사 기준이 적용됩니다. |
충돌 민감도 재정의 | 충돌 검사 기준을 재정의할지 여부를 결정합니다. 만약 재정의하면 영역 안에서는 재정의된 검사 기준이 적용됩니다. |
외력 위반 (TCP SLF) 정지 모드 재정의 | 외력 위반 시 적용할 정지 모드를 재정의할지 여부를 결정합니다. 만약 재정의하면 영역 안에서는 재정의된 정지모드가 적용됩니다. |
충돌 위반 (COLLISION) 정지 모드 재정의 | 충돌 발생 시 적용할 정지 모드를 재정의할지 여부를 결정합니다. 만약 재정의하면 영역 안에서는 재정의된 정지모드가 적용됩니다. |
속도 감속률 재정의 | 속도 감속률 재정의 여부와 적용할 값을 정의합니다. 만약 재정의하면 로봇은 영역 안에서 재정의된 속도 감속률만큼 감속하여 동작합니다. |
툴 방향 제한 | 안전 영역 안에서 툴 방향 제한 여부와 제한 기준을 정의합니다. |
협동 작업 공간 설정 | 안전 영역을 협동 작업 공간으로 설정할지 여부를 결정합니다. |
안전 입력 기반 동적 활성화 | 안전 영역을 안전 입력 신호에 기반하여 활성화할 지 여부를 결정합니다. 만약 안전 입력 채널이 정의되면, 해당 안전 영역은 정의된 안전 입력 채널의 신호가 인가될 때 활성화됩니다. |
안전 출력 기반 동적 활성화 | 안전 영역을 안전 출력 신호에 기반하여 활성화할 지 여부를 결정합니다. 만약 안전 출력 채널이 정의되면, 해당 안전 영역은 정의된 안전 출력 채널의 신호가 인가될 때 활성화됩니다. |
주의
로컬 영역이 설정되었을 때, 영역 안에서의 안전 기능 검사 기준은 다음과 같이 결정됩니다.
1) 로봇이 수동 조작이나 교시 모드로 움직일 때
로컬 영역에서 재정의한 검사 기준은 무시되고, 글로벌 안전 파라미터의 감속 모드 제한값이 검사 기준이 됩니다.
2) 로봇이 자동 모드로 동작 중일 때
TCP가 로컬 영역 내부에 있고, 로컬 영역의 속성에서 검사 기준을 재정의했다면 로컬 영역 제한값이 검사 기준이 됩니다.
3) 감속 모드일 때
로봇이 자동 모드로 움직이는 도중에 감속 모드 신호가 인가되면, 로컬 영역 제한값과 글로벌 안전 파라미터의 감속 모드 제한값 중 안전한 값이 검사 기준이 됩니다.
단, 로컬 영역의 속성 중에 ‘감속 모드에 우선’ 속성을 활성화하면 로컬 영역 제한값이 검사 기준이 됩니다.