
디지털 용접기 설정
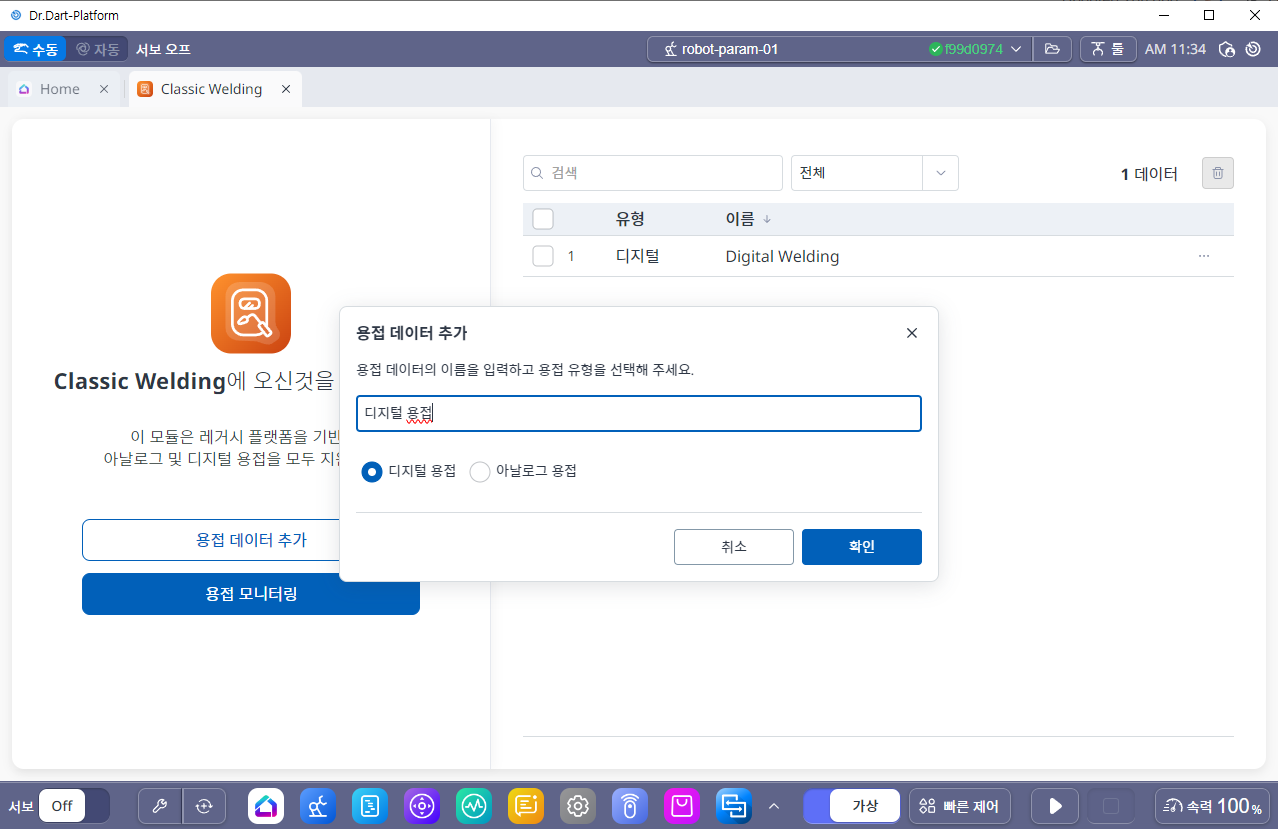
디지털 용접을 사용하기 위해서는 “용접 데이터 추가”를 누른 뒤, “디지털 용접” 을 선택 하고 용접기 이름을 작성합니다.
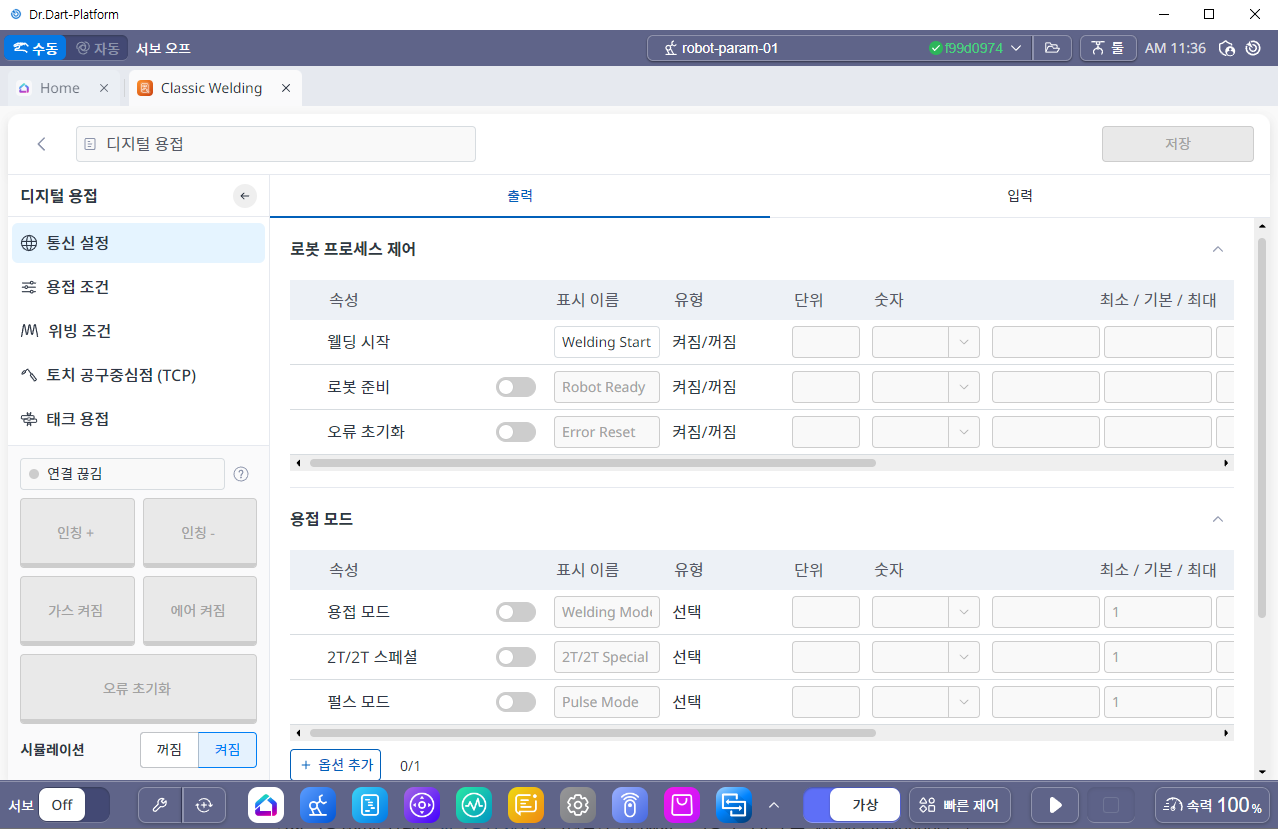
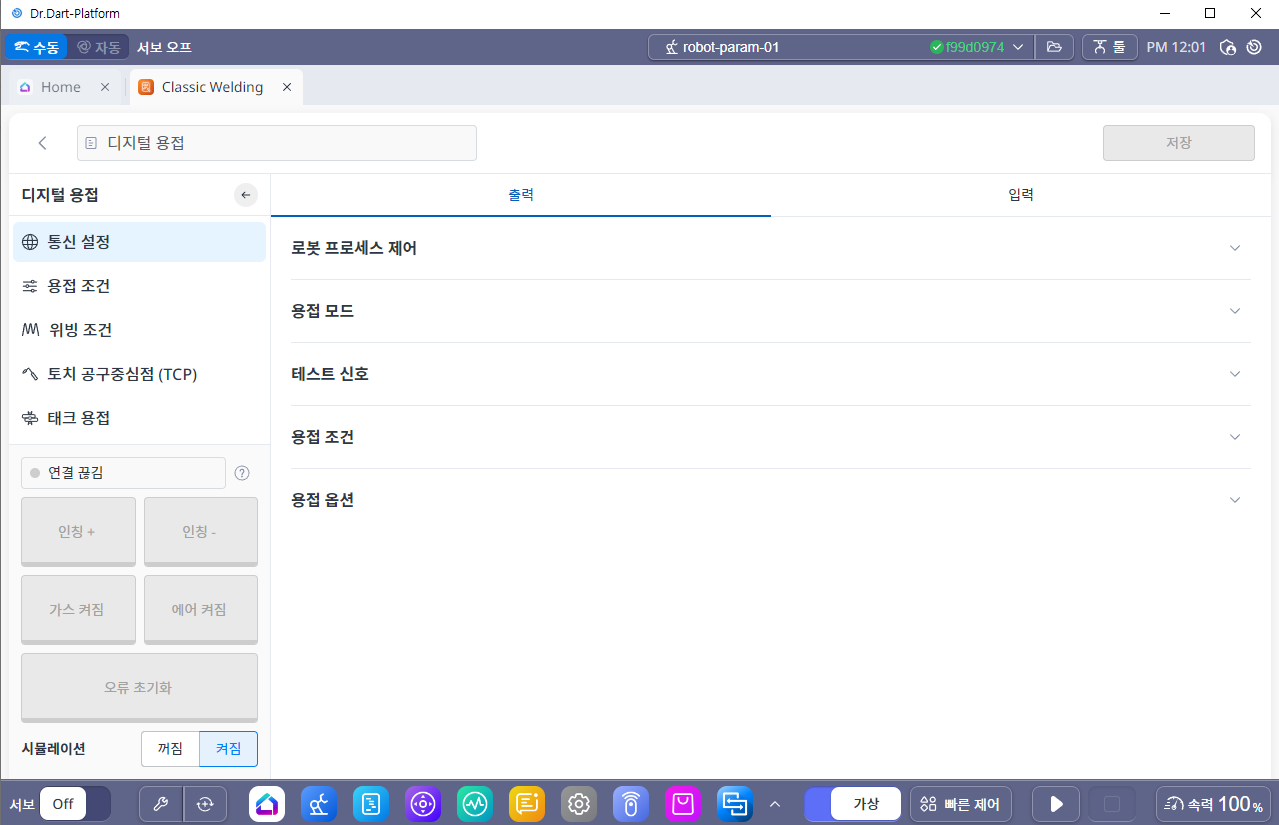
1. 통신 설정
시너직(Synergic)방식의 용접기와 EtheNet/IP 통신을 통해 로봇과 용접기의 양방향의 설정 및 신호를 전송하며 연동할 수 있습니다. 각 용접기별로 제공하는 기능과 이에 대한 시그널 설정 정보가 다르며 ‘용접기 인터페이스 설정’ 메뉴에서는 용접기별로 제공하는 다양한 용접조건, 연동 신호 및 모니터링 정보를 범용적인 UI를 통해 설정하여 사용하도록 합니다.
‘통신 설정’ 메뉴에서 설정 및 활성화한 신호들은 용접 조건, 용접 작업 설정 등의 관련 기능에 연동되므로 가장 먼저 설정되어야 합니다. 아크용접 개요의 물리적인 인터페이스 설정을 완료한 후, ‘통신 설정’ 메뉴에서 아래의 설명을 따라 설정을 진행합니다.
번호 | 항목 | 설명 |
|---|---|---|
1 | 출력 | 로봇에서 용접기로 보내는 신호들을 설정합니다. |
2 | 입력 | 용접기에서 로봇으로 보내는 신호들을 설정합니다. |
3 | Ethernet/IP 연결 상태 | 로봇과 용접기 간의 Ethernet/IP 연결 상태를 표시 합니다. 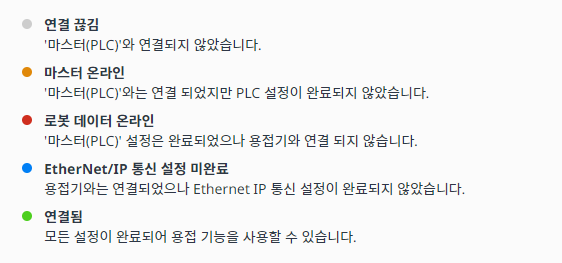 |
4 | 신호 테스트 | 인터페이스 설정 탭에서 설정한 값을 바탕으로 설정한 신호들의 테스트를 수행합니다. 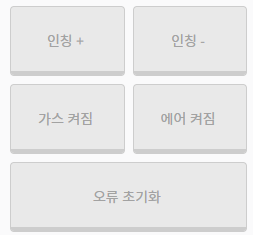 ‘출력’ 탭 에서 ‘로봇 프로세스 제어’, ‘테스트 신호’ 항목이 설정되어야 동작 합니다. |
5 | 시뮬레이션 | 용접 프로그래밍 동작 시, 시뮬레이션을 설정 할 수 있는 메뉴 입니다. 시뮬레이션을 켰을 경우 Arc 는 동작하지 않습니다.  |
로봇-용접기 간 모션-용접 연동 신호에 대한 자세한 설명은 Link 를 참고해 주시기 바랍니다.
2. 출력 설정 (로봇에서 용접기로의 신호 설정)
로봇에서 용접기로 보내는 신호들을 설정합니다. 아래의 그림에서 로봇 프로세스 제어, 용접 모드, 테스트 신호, 용접 조건, 용접 옵션 신호 설정을 합니다.
번호 | 항목 | 설명 |
|---|---|---|
1 | 로봇 프로세스 제어 | (필수 설정 항목 포함) 용접작업 시 로봇-용접기 간 연동을 위한 신호 중 로봇에서 용접기로 전송하는 신호를 설정합니다. 용접작업 시작(Welding Start), 로봇 레디(Robot Ready), 용접기 에러 초기화(Error Reset) 신호가 포함됩니다. |
2 | 용접 모드 | 용접 모드 및 작동 모드 신호를 설정하며, 용접기에서 제공하는 경우에 해당 모드신호를 설정하여 활용할 수 있습니다. 세부 모드에 대해서는 사용하고자 하는 용접기의 매뉴얼을 참고해주세요.
|
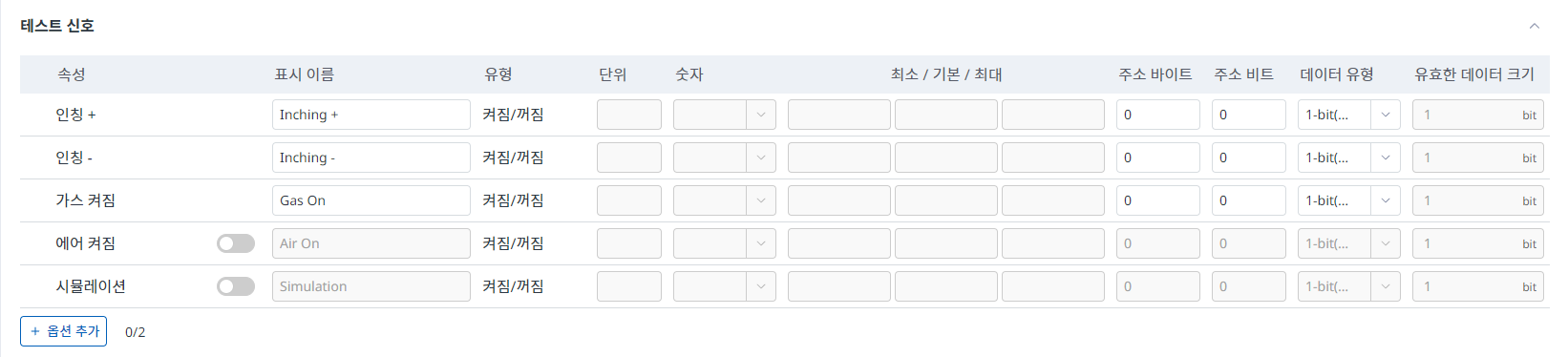
3 | 테스트 신호 | (필수 설정 항목 포함) 와이어 인칭(+/-) (Inching +, Inching -), 가스 켜짐(Gas Test), 에어 켜짐(Air On), 시뮬레이션(Simulation) 신호에 대해 설정합니다. 필요한 2개의 항목을 더 추가하여 설정할 수 있습니다. |
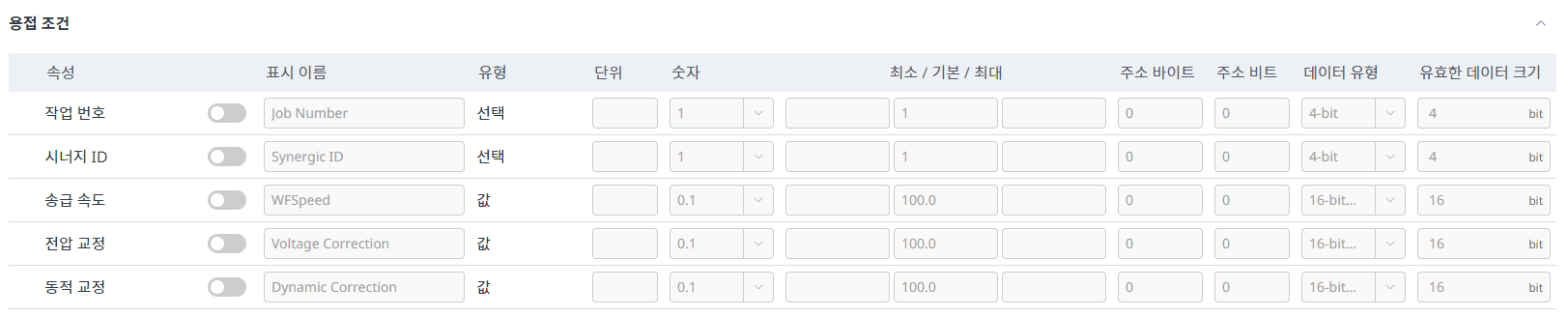
4 | 용접 조건 | 용접기에 저장된 시너직(Synergic) 조건번호 및 용접작업번호를 선택하고, 용접 중 세부조건을 조정할 수 있는 신호를 설정합니다. 작업번호(Job Number), 시너지ID(Synergic ID), 송급 속도(WFSpeed), 전압 교정(Voltage Correction), 동적 교정(Dynamic Correction)가 있습니다. |
5 | 용접 옵션 | 필요한 항목들을 추가하여 설정할 수 있습니다. 최대 15개를 추가할 수 있습니다. |
2-1. 로봇 프로세스 제어

번호 | 항목 | 설명 |
|---|---|---|
1 | 웰딩 시작 | 용접작업 시작(Welding Start) |
2 | 로봇 준비 | 로봇 레디(Robot Ready) |
3 | 오류 초기화 | 용접기 에러 초기화(Error Reset) 신호가 포함됩니다. |
2-2. 용접 모드

번호 | 항목 | 설명 |
|---|---|---|
1 | 용접 모드 | 용접기 고유의 용접모드 설정을 지정합니다. 예를 들어 ‘Fronius’용접기의 Working mode에 대응됩니다. |
2 | 2T/2T 스페셜 | 용접기 고유의 용접 작업모드 설정 신호입니다. 주로 용접 시작/끝 조건 설정 (2T / 2T Special)를 지정합니다. 예를 들어 ‘EWM’용접기의 operating mode (latched/non-latched mode)에 대응됩니다. |
3 | 펄스 모드 | 펄스 용접 모드 사용 여부를 지정합니다. |
4 | 옵션 모드 | 기본적으로 제공하는 모드 지정 항목 외에 추가적으로 모드 변경하고자 하는 항목을 추가할 때 활용가능 합니다. 옵션 항목 추가는 하단 Add Option 버튼을 이용하여 추가 가능합니다. |
2-3. 테스트 신호
와이어 인칭(+/-) (Inching +, Inching -), 가스 켜짐(Gas Test), 에어 켜짐(Air On), 시뮬레이션(Simulation) 신호에 대해 설정합니다.
필요한 2개의 항목을 더 추가하여 설정할 수 있습니다.
2-4. 용접 조건
번호 | 항목 | 설명 |
|---|---|---|
1 | 작업 번호 | 용접기에 저장되어 있는 용접조건에 해당하는 작업 번호 값을 지정합니다. |
2 | 시너지 ID | 용접기에서 제공하는 시너지 기능의 연동을 위해 용접 환경 조건을 저장한 프로그램 번호 값을 지정합니다. |
3 | 송급 속도 | 와이어 송급 속도 값을 지정합니다. |
4 | 전압 교정 | 용접 중 전압 조정 값을 지정합니다. |
5 | 동적 교정 | 용접 중 용접기의 동적 변수 조정 값을 지정합니다. |
2-5. 용접 옵션

번호 | 항목 | 설명 |
|---|---|---|
1 | 옵션 | 기본적으로 제공하는 용접조건 항목 외에 추가적으로 용접조건으로 지정하고자 할 때 활용가능 합니다. |
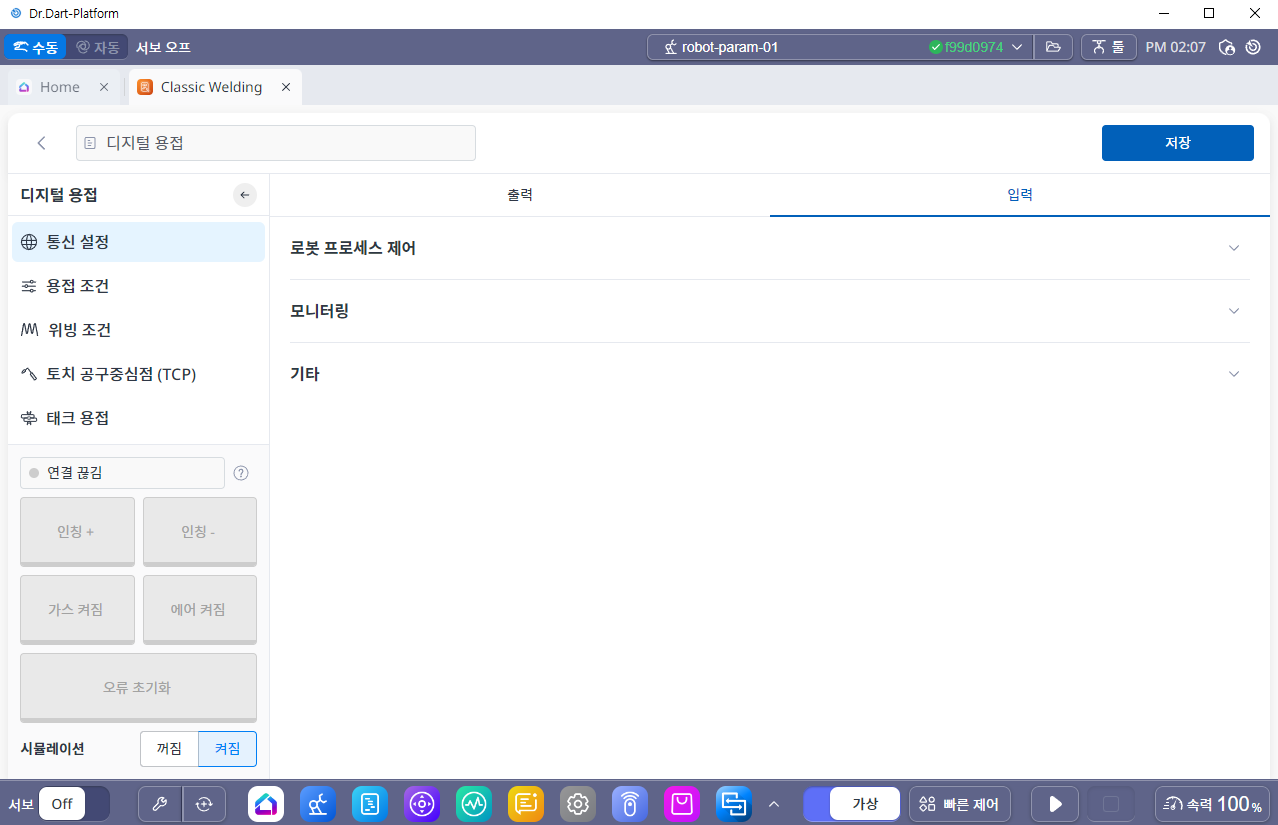
3. 입력 설정 (용접기 에서 로봇으로의 신호 설정)
용접기에서 로봇으로 보내는 신호들을 설정합니다. 아래의 그림에서 로봇 프로세스 제어, 모니터링, 기타 신호 설정을 합니다.
번호 | 항목 | 설명 |
|---|---|---|
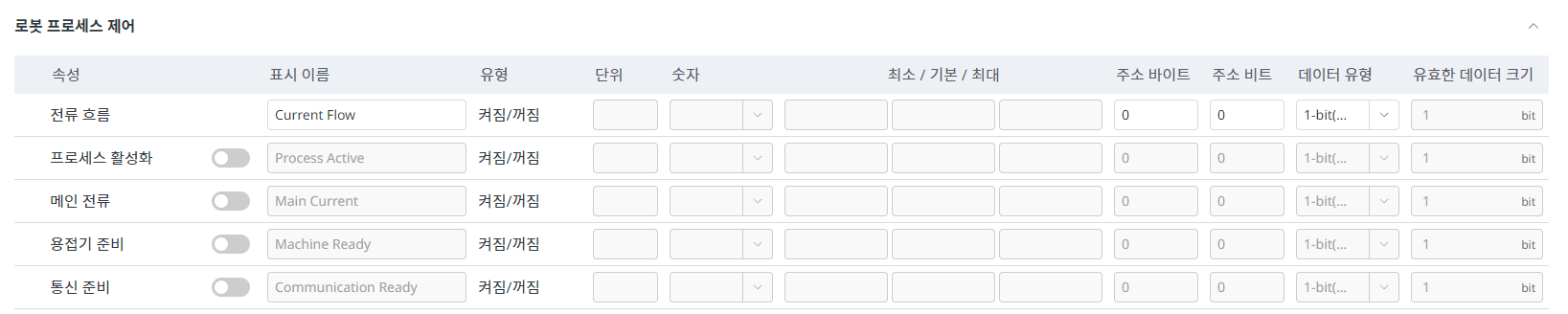
1 | 로봇 프로세스 제어 | (필수 설정 항목 포함) 용접작업 시 로봇-용접기 간 연동을 위한 신호 중 용접기에서 로봇으로 전송하는 신호를 설정합니다. 전류 흐름, 프로세스 활성화, 메인 전류, 용접기 준비, 통신 준비에 대해 설정합니다. |
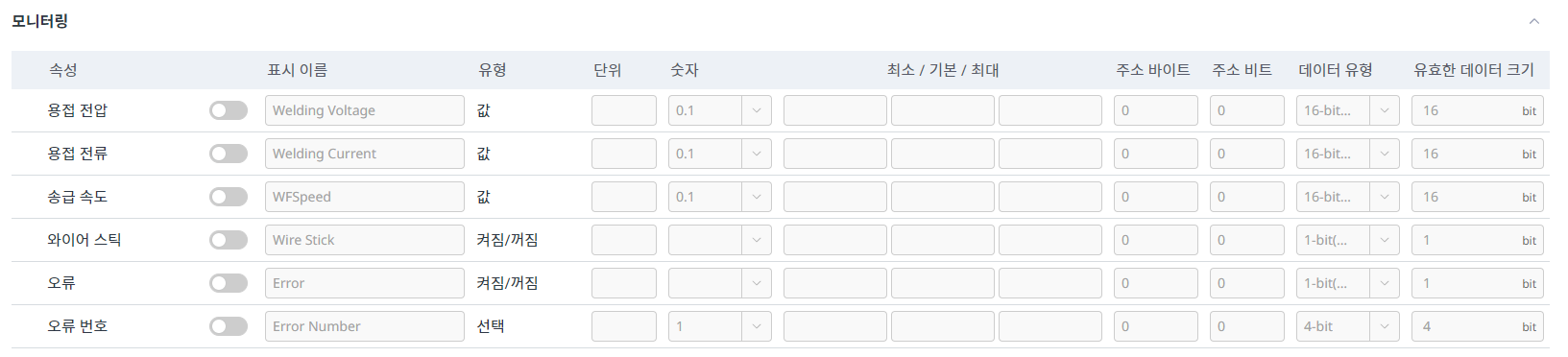
2 | 모니터링 | 용접 중 용접상태 정보인 용접 전압, 용접 전류, 송급 속도, 와이어 스틱, 오류, 오류 번호를 설정합니다. |
3 | 기타 | 필요한 항목들을 추가하여 설정할 수 있습니다. 최대 10개를 추가할 수 있습니다. |
3-1. 로봇 프로세스 제어
3-2. 모니터링
3-3. 기타

4. 신호 설정 (공통)
EtherNet/IP 인터페이스 설정 항목을 사전에 구성할 수 있습니다. 설정된 항목들은 용접 조건 설정 시에 자동으로 구성되어 표시됩니다.

각 항목 별 사용 여부, 표시 이름, 유형, 단위, 숫자, 최소/기본/최대, 주소 바이트, 주소 비트, 데이터 유형, 유효한 데이터 크기를 설정할 수 있습니다.
번호 | 항목 | 설명 |
|---|---|---|
1 | 활성화 | 해당 항목의 사용/비 사용 여부를 설정합니다. 그룹 별 필수 설정 항목은 해당 버튼이 없습니다. |
2 | 표시 이름 | 용접 조건 설정 등에서 해당 항목 사용시 표시하는 이름을 설정합니다. 용접기별로 사용되는 이름이 서로 다르므로 이 항목에 연결하고자 하는 용접기의 해당 기능 이름을 입력하면 유용합니다. 영문 기준 최대 20자를 입력할 수 있습니다. |
3 | 유형 | 기능의 입력 방식을 설정합니다.
|
4 | 단위 | 기능의 단위를 설정합니다. |
5 | 숫자 | 입력 값의 자릿수를 설정합니다. (1 / 0.1 / 0.01) |
6 | 최소/기본/최대 | 최소값/기본값/최대값을 설정합니다. |
7 | 주소 바이트 | 통신을 위한 Data의 바이트 시작 위치를 설정합니다. |
8 | 주소 비트 | 통신을 위한 Data의 비트 시작 위치를 설정합니다. |
9 | 데이터 유형 | 통신 Data의 크기를 설정합니다. (1-bit(disable Low), 1-bit(disable High), 2-bit, 4-bit, 8-bit(byte), 15-bit, 16-bit(short), 32-bit(int)) |
10 | 유요한 데이터 크기 | 유효한 Data의 크기를 설정합니다. 1부터 ‘데이터 유형’ 에서 선택한 타입 내의 값을 입력해야 합니다. |
디지털 용접의 경우 설정을 완료 한 후 반드시 우측 상단에 있는 “저장” 버튼을 눌러야 용접기와의 통신설정이 됩니다.