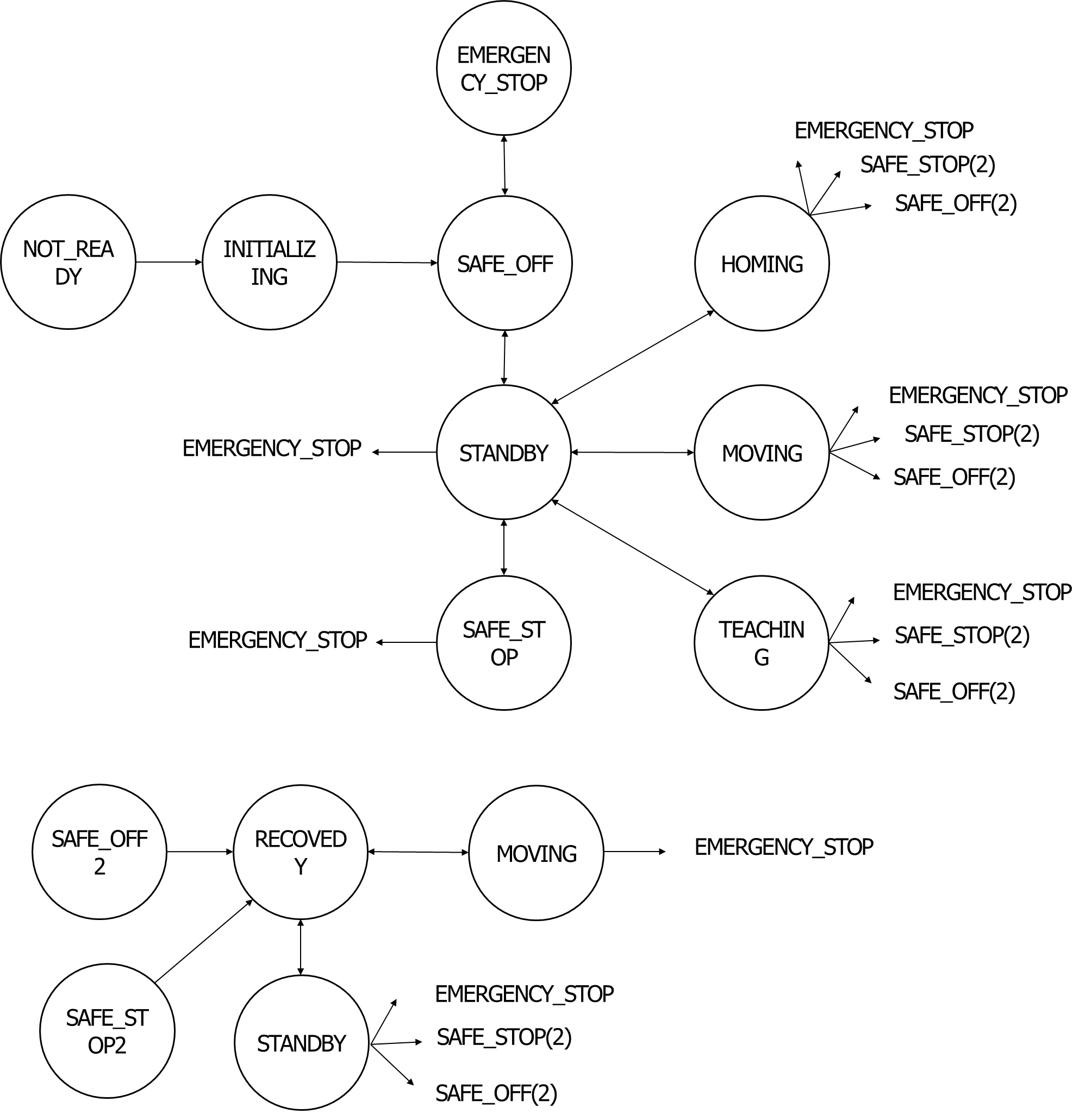
로봇 상태 천이
지령 대기 상태(STATE_STANDBY)가 로봇 제어을 위한 기본 준비 상태이며, 사용자로부터 제어 명령 수신시 자동으로 STATE_HOMING 상태나, STATE_MOVING 상태 혹은 STATE_TEACHING 상태로 전환하면서 동작을 수행하고, 오류없이 동작이 완료되면 다시 STATE_STANDBY 상태로 전환하여 사용자 명령을 대기하게 된다.
EMERGENCY_STOP 상태는 초기화(STATE_INITIALIZING) 상태를 제외한 어느 상태에서도 E/M 버튼에 의해서 전환되어 로봇이 정지하게 되며, 로봇 제어기 내부적으로 기능이나 동작 오류 발생시에도 SAFE_OFF 상태(모터 및 브레이크 전원 차단)나, SAFE_STOP 상태(제어 정지)로 자동 전환되어 로봇이 정지하게 된다.
이외에 안전상 사용자에 의해서 직접 상태가 전환되어야 하는 기능은 다음과 같으며, SetRobotControl 함수에 의해서 이 기능을 수행할 수 있다.
순번 | 로봇 상태 제어 명령 | 설명 |
|---|---|---|
0 | CONTROL_INIT_CONFIG | STATE_NOT_READY 상태에서 STATE_INITIALIZING 상태로 전환하는 기능을 수행하며, T/P 어플리케이션만이 이 기능을 수행함. |
1 | CONTROL_ENABLE_OPERATION | STATE_INITIALIZING상태에서 STATE_STANDBY 상내로 전환하는 기능을 수행하며 T/P 어플리케이션만이 이 기능을 수행함 |
2 | CONTROL_RESET_SAFET_STOP | STATE_SAFE_STOP 상태에서 STATE_STANDBY 상태로 전환하는 기능을 수행함. 자동모드 일 경우, 프로그램 재시작 여부를 설정할 수 있음. |
3 | CONTROL_RESET_SAFET_OFF | STATE_SAFE_OFF 상태에서 STATE_STANDBY 상태로 전환하는 기능을 수행함, |
4 | CONTROL_RECOVERY_SAFE_STOP | STATE_SAFE_STOP2 상태에서 S/W 적으로 STATE_RECOVERY 상태로 전환하는 기능을 수행함. |
5 | CONTROL_RECOVERY_SAFE_OFF | STATE_SAFE_OFF2 상태에서 S/W 적으로 STATE_ RECOVERY 상태로 전환하는 기능을 수행함. |
6 | CONTROL_RECOVERY_BACKDRIVE | STATE_SAFE_OFF2 상태에서 H/W 적으로 STATE_ RECOVERY 상태로 전환하는 기능을 수행함. STATE_STANDBY 상태로 전환할 수 없고 로봇 제어기 전원을 재부팅해야 함. |
7 | CONTROL_RESET_RECOVERY | STATE_ RECOVERY 상태에서 STATE_STANDBY 상태로 전환하는 기능을 수행함. |
SAFE_OFF상태는 일반적으로 서보온에 해당하는 RESET_SAFE_OFF 명령에 의해 지령대기 상태(STATE_STANDBY)로 전환되며, SAFE_STOP 상태는 RESET_SAFE_STOP 사용자 명령에 의해 지령대기 상태(STATE_STANDBY)로 전환된다. 또한 로봇의 제한 한계치를 넘어서는 오류가 발생할 경우, SAFE_OFF2 상태(모터 및 브레이크 전원 차단)나, SAFE_STOP2 상태(제어 정지)로 전환되는데, 이경우에는 RECOVERY 모드로 전환하여 제한 한계치안으로 로봇을 이동 후 RESET_RECOVERY 명령으로 지령대기 상태(STATE_STANDBY)로 전환해야 오류 발생 없이 정상적으로 로봇 제어를 수행할 수 있다.