製品の紹介 (CS-12P)
各部の名称と機能
DC コントローラー (CS-12P)
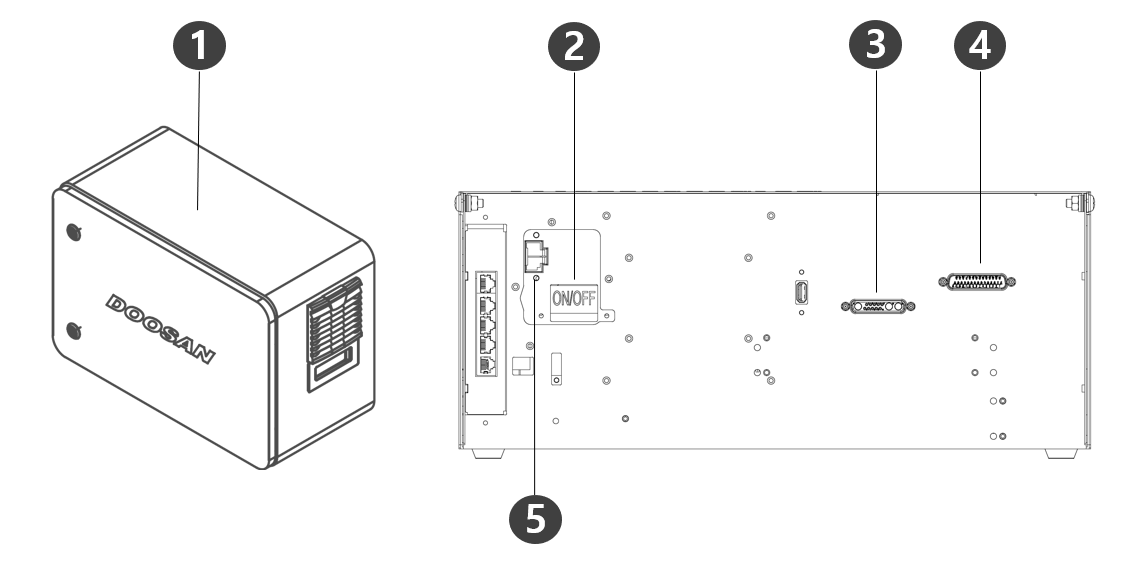
番号 | 項目 | 説明 |
1 | I/O connection terminal (internal) | 別のロボットのコントローラーや周辺機器とつなぐことができます。 |
2 | Power switch | コントローラーの主電源を入れたり切ったりできます。 |
3 | Teach pendant cable connection terminal | ティーチペンダントのケーブルをコントローラーとつなぎます。 |
4 | Robot cable connection terminal | ロボットのケーブルをコントローラーとつなぎます。 |
5 | Power connection terminal | コントローラーの電源をつなぎます。 |
システム構成図
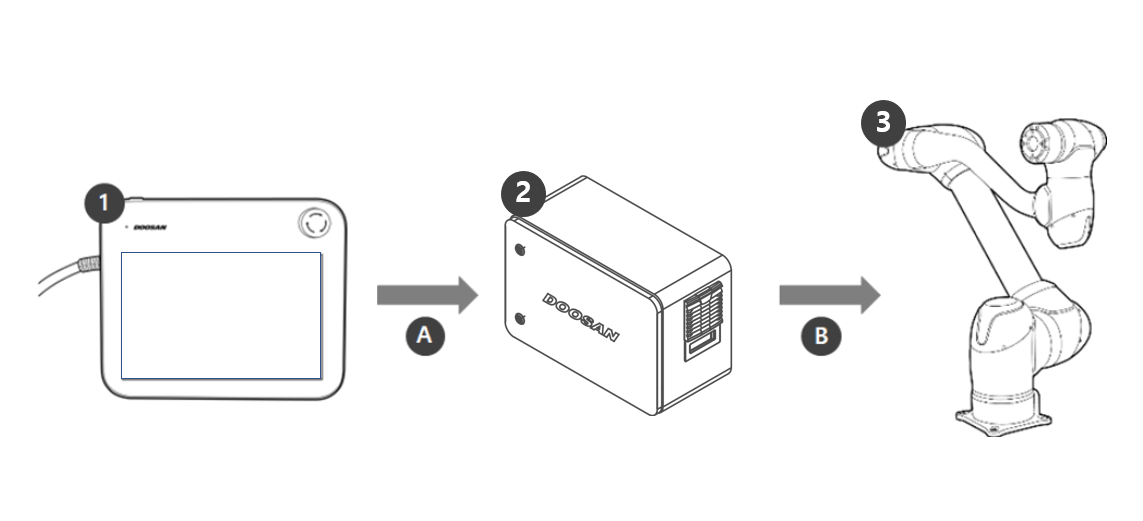
| 1 | ティーチペンダント | システム全体を管理する機器で、ロボットに特定のポーズを学習させたり、マニピュレーターとコントローラーに関連した設定ができます |
| 2 | コントローラー | ティーチペンダントで設定したポーズや動きに従ってロボットの動きを調整します。様々な入出力ポートが備わっており、様々な装備と装置をつないで使用できます。 |
| 3 | マニピュレーター | 物体を運搬したり部品を組み立てるのに使用できる産業用協調ロボットで、様々なツールを取り付けて使用できます。 |
| A | 命令/モニタリング | |
| B | 電源/ネットワーク |
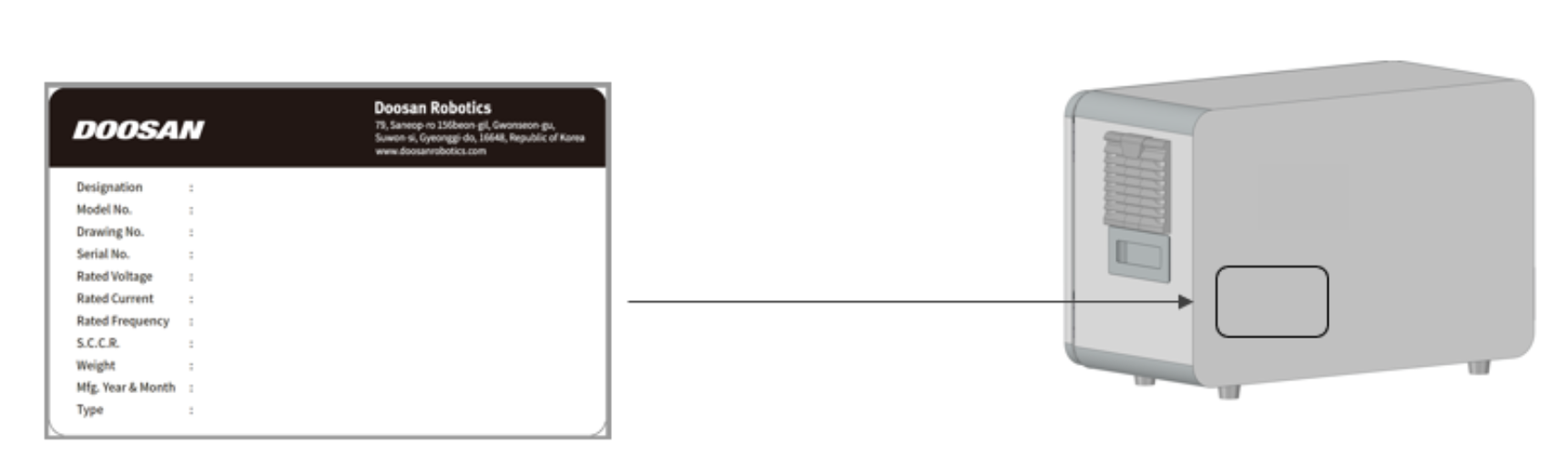
ラベル