リモートコントロールモジュール
リモートコントロールモジュールを使用すると、すでに作成したタスクに対してリモートコントロールを実行できます。
このモジュールは管理者レベルで実行できます。
メニューレイアウト
| Item | Description | |
|---|---|---|
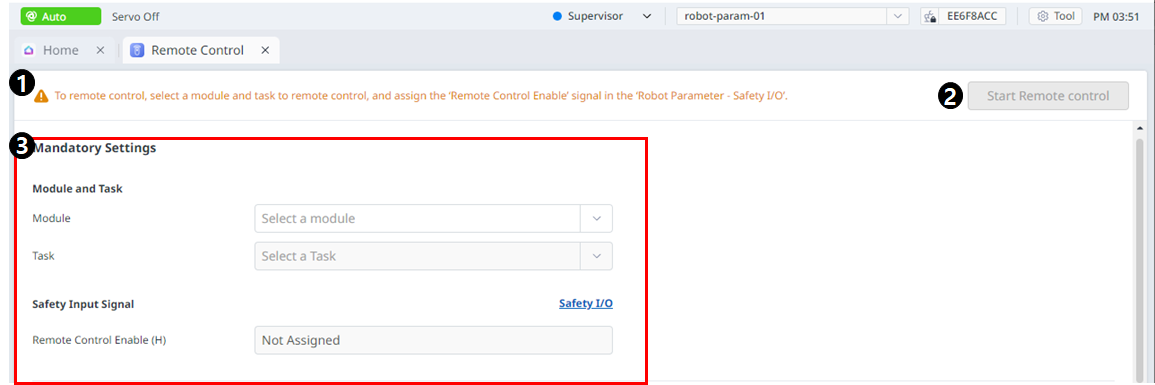
| 1 | Warning | これは、モジュールを使用する際に必要な注意事項を示しています。 |
| 2 | Start Remote Control | このボタンを使用すると、すべての設定が完了した後でリモートコントロールを開始できます。 |
| 3 | Mandatory Settings | これはリモートコントロールの必須設定です。 モジュールおよびタスクの設定、および安全入力信号の設定が可能です。 |
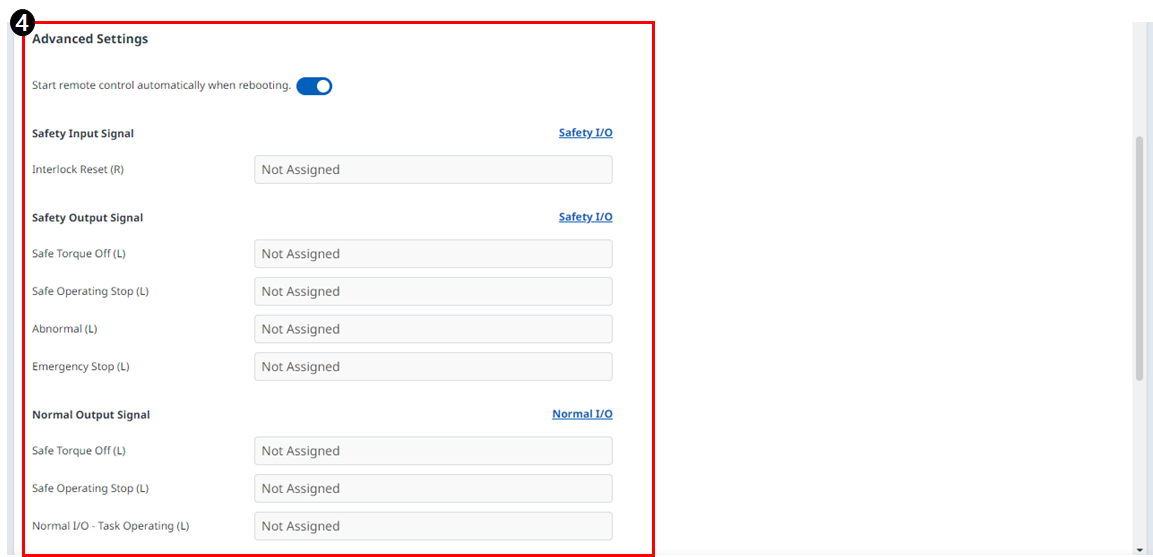
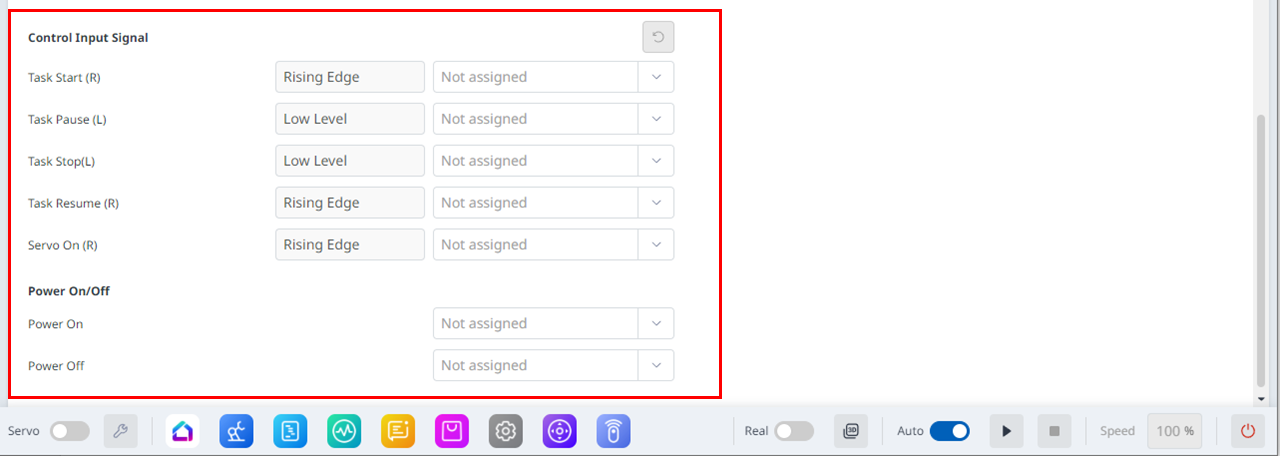
| 4 | Advanced Settings | これにより、リモートコントロールの詳細設定が可能になります。 タスクの各ポートを、開始/一時停止/停止/再開/サーボオンに設定できます。 再起動後にリモートコントロールが自動的に実行されるように設定されている場合は、DART-Platformが再起動するとすぐに実行されます。 |
リモートコントロールを開始すると、リモートコントロールモード画面に移動できます。
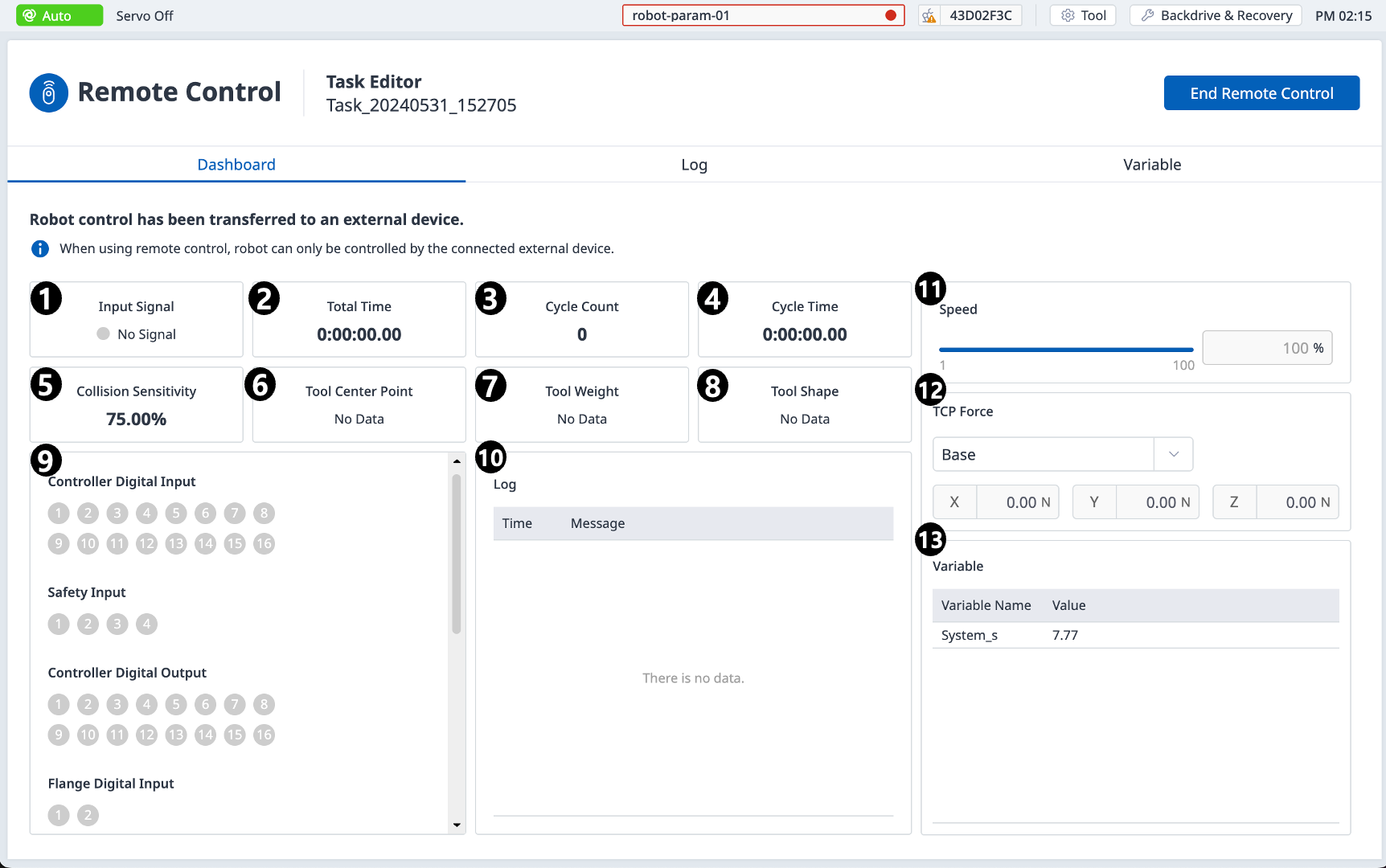
Dashboard
| Item | Description | |
|---|---|---|
| 1 | Input Signal | 安全入出力に設定されている安全入力信号項目のうち、リモコン起動信号を受信して表示します。 |
| 2 | Total Time | タスクが実行された時刻を表示します。 |
| 3 | Cycle Count | タスクの繰り返し回数を表示します。 |
| 4 | Cycle Time | タスクの1サイクル時間を表示します。 |
| 5 | Collision Sensitivity | 衝突感度値を表示します。ゾーン内の場合は、そのゾーンに設定されている衝撃感度値を表示します。ゾーン外の場合は、ロボットリミットに設定されている衝突感度値を表示します。 |
| 6 | Tool Center Point | タスクで指定されたツール中心点を表示します。 |
| 7 | Tool Weight | タスクで指定されたツール重量を表示します。 |
| 8 | Tool Shape | タスクで指定されたツール形状を表示します。 |
| 9 | Signal Input/Output | それぞれの信号入出力値を表示します。 |
| 10 | Log | システムログ情報を表示します。 |
| 11 | Speed | タスクの速度を設定できます。 |
| 12 | TCP Force | TCPに適用される力をリアルタイムで表示します。 |
| 13 | Variable | 実行中のタスクで使用されている変数値を表示します。 |
| Item | Description | |
|---|---|---|
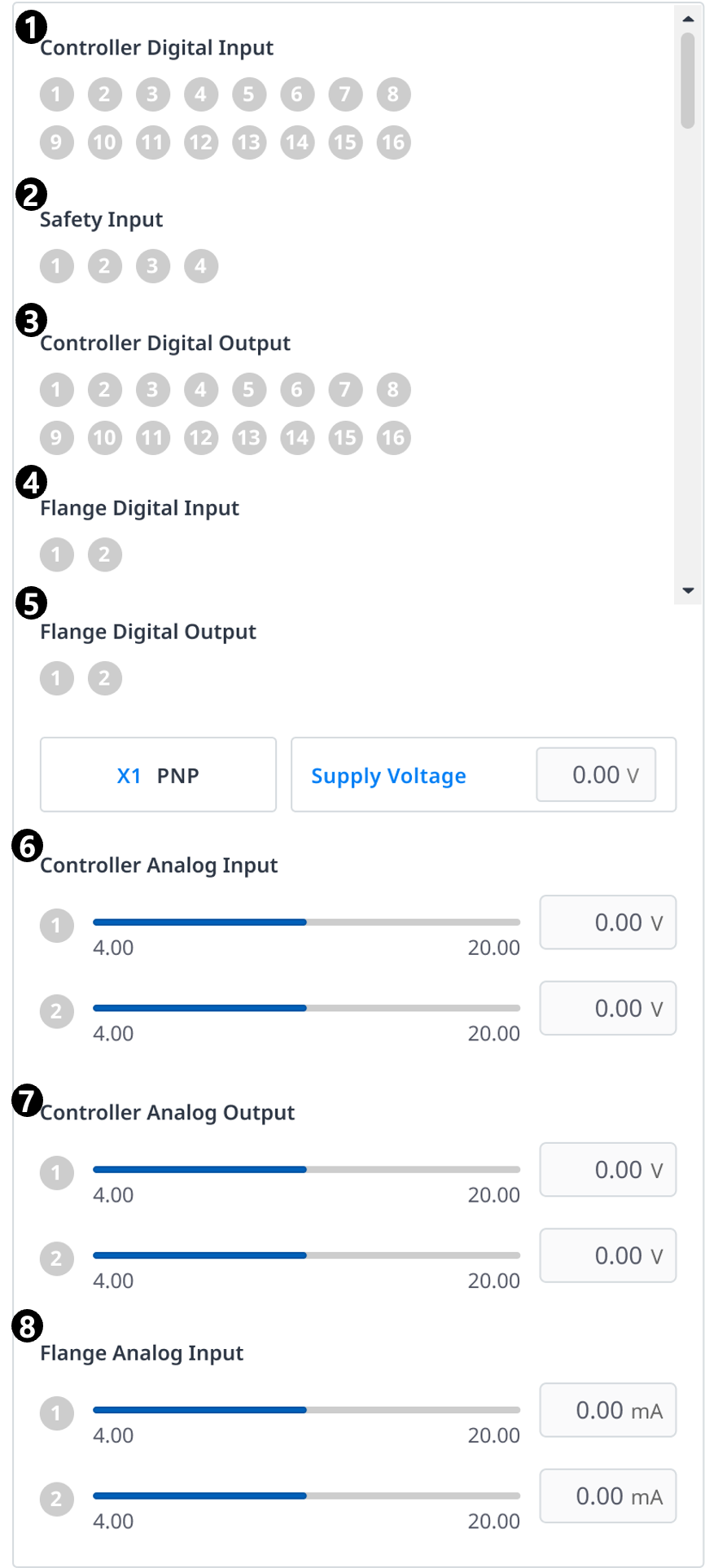
| 1 | Controller Digital Input | コントローラのデジタル入力設定を表示します。 |
| 2 | Safety Input | コントローラの安全入力設定を表示します。 |
| 3 | Controller Digital Output | コントローラのコントローラのデジタル出力設定を表示します。 |
| 4 | Flange Digital Input | フランジのデジタル入力設定を表示します。 |
| 5 | Flange Digital Output | フランジのデジタル出力設定を表示します。 |
| 6 | Controller Analog Input | コントローラのアナログ入力設定を表示します。 |
| 7 | Controller Analog Output | コントローラのアナログ出力設定を表示します。 |
| 8 | Flange Analog Input | フランジアナログ入力設定を表示します |
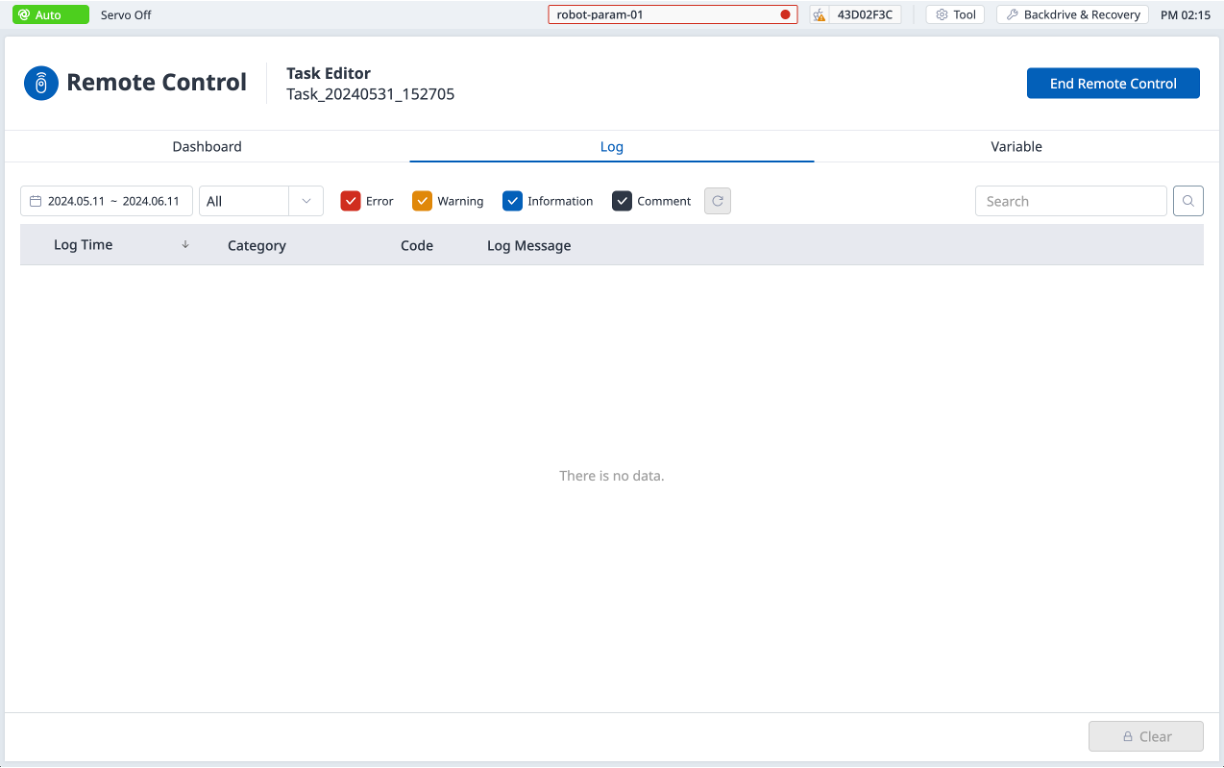
ログ
システム ログ情報を表示します。
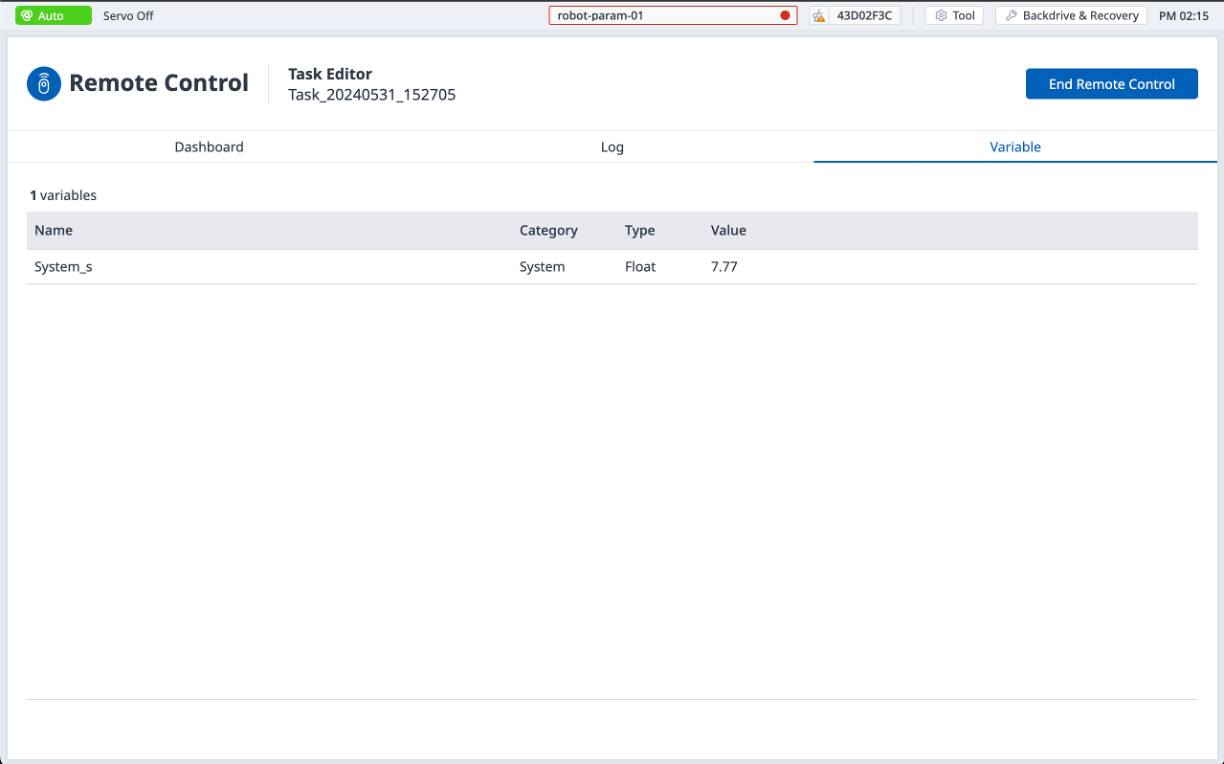
変数
実行中のタスクで使用される変数値を表示します。