
摩擦校准
このメニューは、E および A シリーズ ロボットでのみアクセスできます。
| アイテム | 説明 | |
|---|---|---|
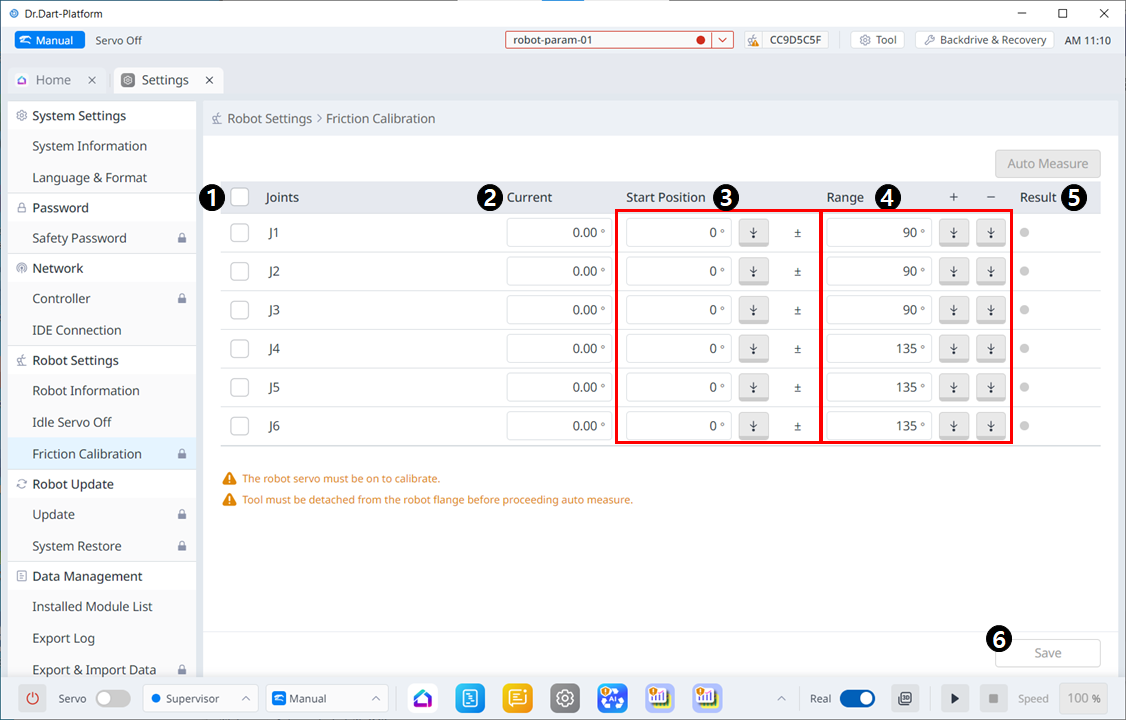
| 1 | Joint Check Box | 自動測定するジョイントを選択します。 |
| 2 | Current | 現在のロボットの姿勢を表示します。 |
| 3 | Start Position | 自動測定を行う際に関節を開始する姿勢を入力します。 選択されていない軸にも入力が必要です。 |
| 4 | Range | 軸が移動する範囲を入力します。 チェックされた軸のみが入力可能になります。 |
| 5 | Result | 自動測定の結果を表示します。 |
| 6 | Save | 測定結果は部下に反映されます。 |