
パネルの位置合わせ
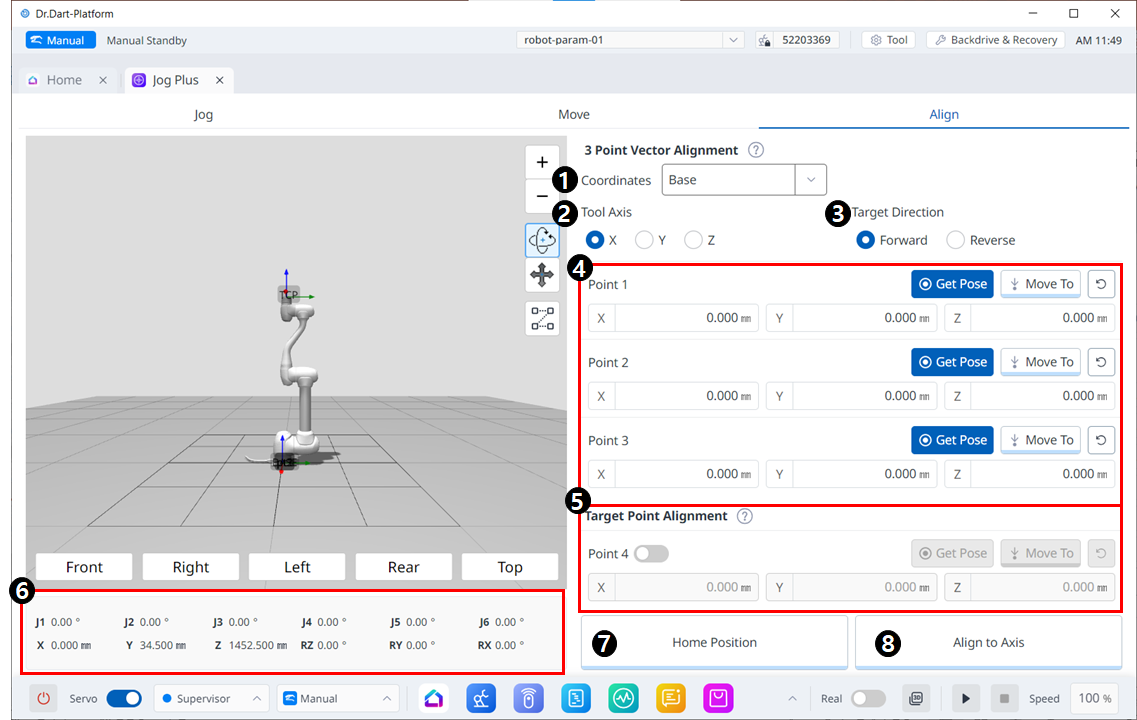
整列メニュー
| Item | Description | |
|---|---|---|
| 1 | Coordinates | 図 4 および 5 の位置の基準座標系を選択します。 |
| 2 | Tool Axis | TCP のどの軸を揃えるかを選択します。 |
| 3 | Target direction | 正逆方向の選択 |
| 4 | Pick points on a plane | 3 つの点を選択して平面を定義します。 定義は次のとおりです。
|
| 5 | Target Point Alignment | TCP を配置するポイントを選択します。 これはオプションであり、チェックを外した場合、方向のみが現在の位置から並べ替えられます。 |
| 6 | Robot Posture | 現在のロボットの関節姿勢とタスク姿勢を表示します。 タスクの姿勢については、図 1 で選択した基準座標系に従います。 |
| 7 | Home Position | ボタンをクリックするとホームポジションに移動します。 |
| 8 | Align to Axis | ボタンをクリックすると動きます。 |
