
名前と関数
マニピュレータ
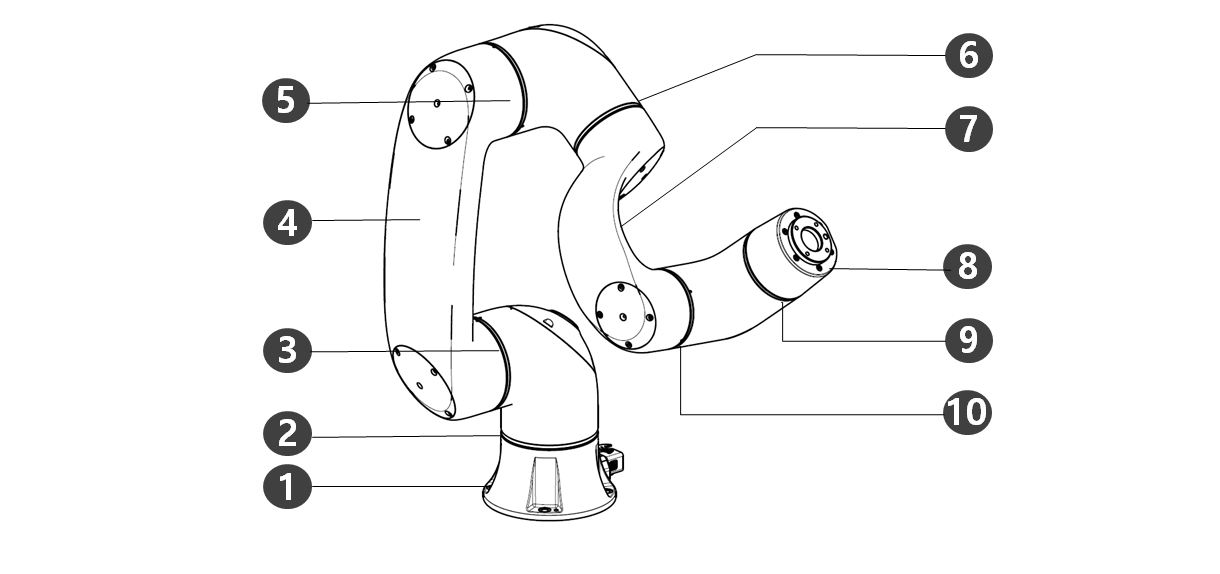
部品名
いいえ。 | 名称 | いいえ。 | 名称 |
|---|---|---|---|
1 | ベース | 6 | J4 |
2 | J1 | 7 | リンク2 |
3 | J2 | 8 | ツールフランジ |
4 | リンク1 | 9 | J5 |
5 | J3 | 10 | J6 |
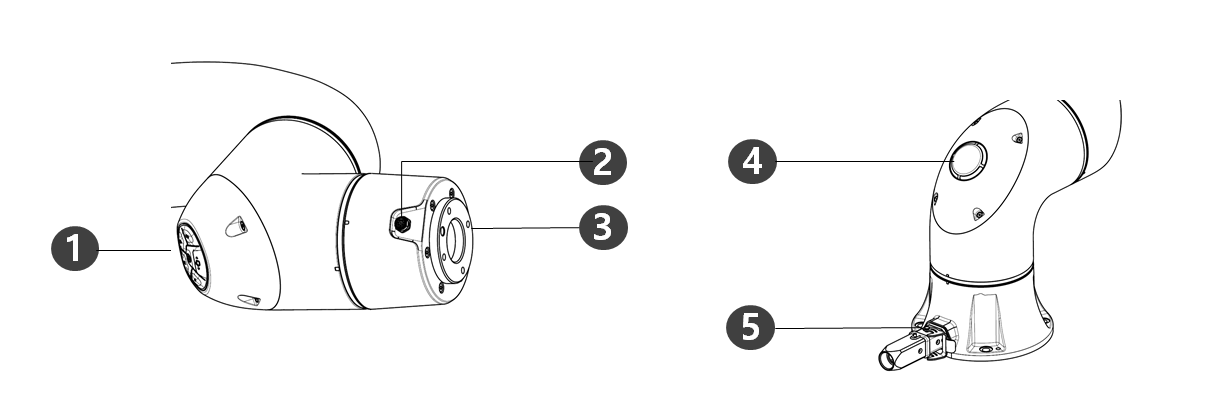
主な特長
いいえ。 | 項目 | 説明 |
|---|---|---|
1 | コックピット | [オプション]直接ティーチングに使用するコントローラー。 |
2 | フランジI/O | ツール制御用のI/Oポート。 |
3 | ツールフランジ | 工具を取り付けるエリア。 |
4 | LED | さまざまな色でロボットステータスを表示します。ロボットステータスの詳細については、「 各モードのステータスおよびフランジLEDの色」を参照してください。 |
5 | コネクタ | ロボットへの電力供給と通信に使用されます。 |
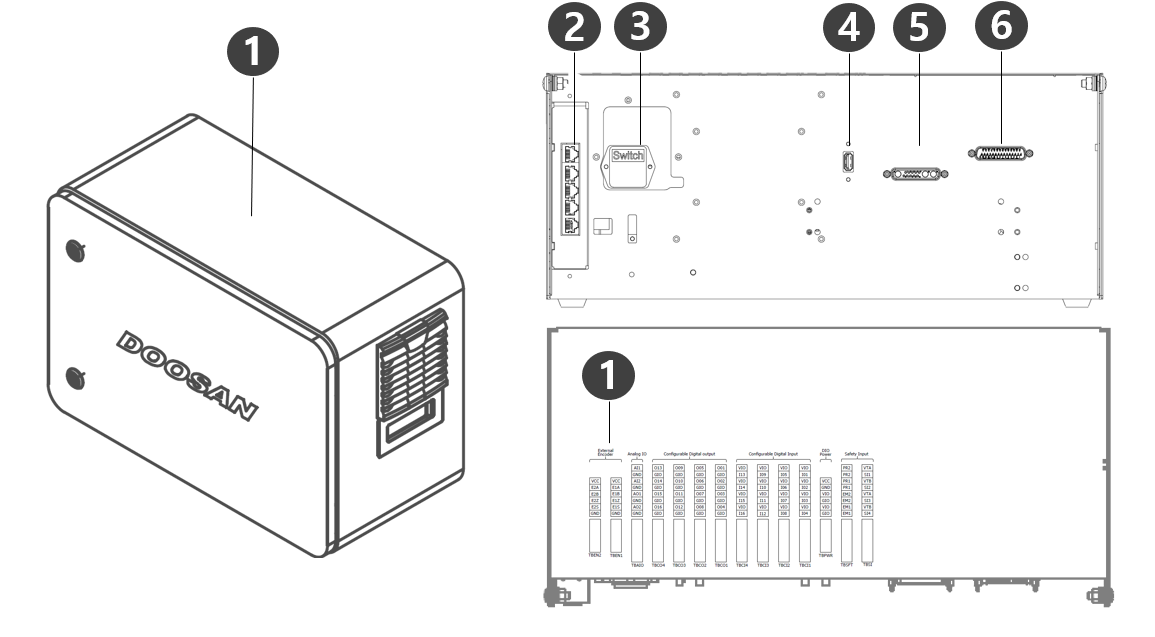
コントローラ
いいえ。 | 項目 | 説明 |
|---|---|---|
1 | I/O接続端子(内部) | 他のロボットのコントローラーや周辺機器と接続できます。 |
| 2 | ネットワーク接続ターミナル | ラップトップ、TCP/IPデバイス、およびModbus機器を使用するために、コントローラ内のネットワーク接続ターミナルに接続するために使用されます。 |
| 3 | 電源接続端子/スイッチ | コントローラの主電源を接続して電源をオンまたはオフにするために使用します。 詳細については、を参照 システムの電源のオン/オフしてください。 |
| 4 | USB接続端子 | ロボットがUSBストレージで動作している間に作成されたログを保存したり、タスクをエクスポートおよびインポートしたりするために使用します。 |
| 5 | マニピュレータケーブル接続端子 | マニピュレータケーブルをコントローラに接続するために使用します。 |
| 6 | ティーチペンダントケーブル接続端子 | ティーチペンダントケーブルをコントローラに接続するために使用します。 |
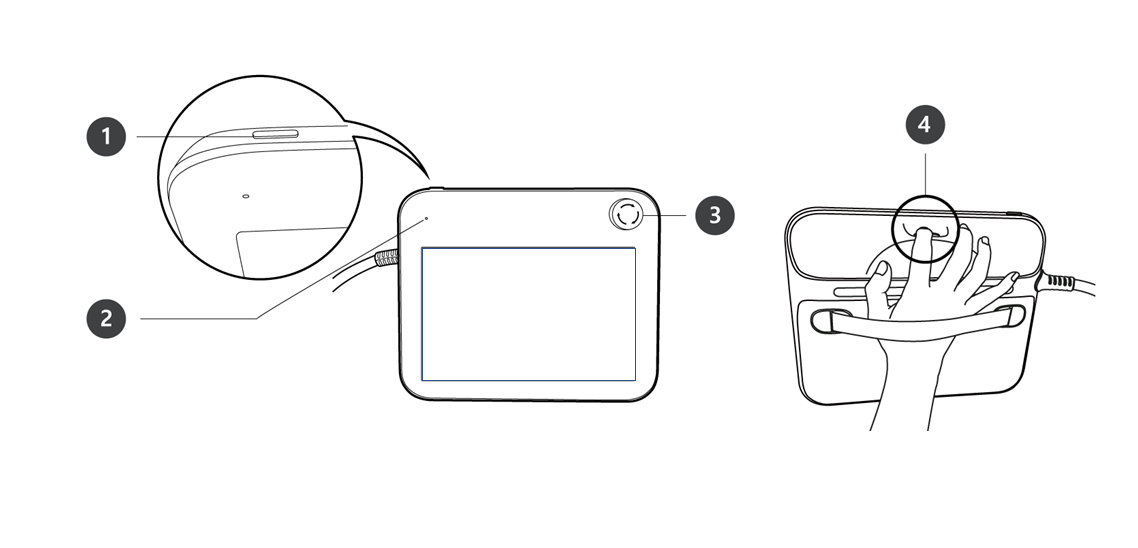
ティーチペンダント
いいえ。 | 項目 | 説明 |
|---|---|---|
1 | 電源ボタン | ティーチペンダントの主電源のオン/オフを切り替えるために使用します。 詳細については、を参照 システムの電源のオン/オフしてください。 |
2 | 電源LED | 電源が供給されると点灯します。 |
3 | 緊急停止ボタン | 緊急時は、ボタンを押してロボットの動作を停止してください。 |
4 | ハンドガイドボタン | ボタンを押したままにすると、ロボットが自由に目的のポーズに移動します。 |
注
- 操作中にティーチペンダントを保護して取り付ける必要がある場合は、当社が提供するソフトカバーを使用すると、より安全で使いやすくなります。