タスクエディターコマンドのコンプライアンス/強制制御の概念の概要
オプション ハード 20分
力制御とコンプライアンス制御は、ロボットの力を制御する機能です。また、モーションコマンドを追加することで、モーションを行うと同時に力を制御することができます。コンプライアンス管理と強制管理には、それぞれ次の違いがあります。
- コンプライアンス管理
- コンプライアンス制御の場合、ロボットはロボットの終端TCPの外力に準拠し、外力が除去されると、ロボットを本来の位置に戻すための力が生成されます。
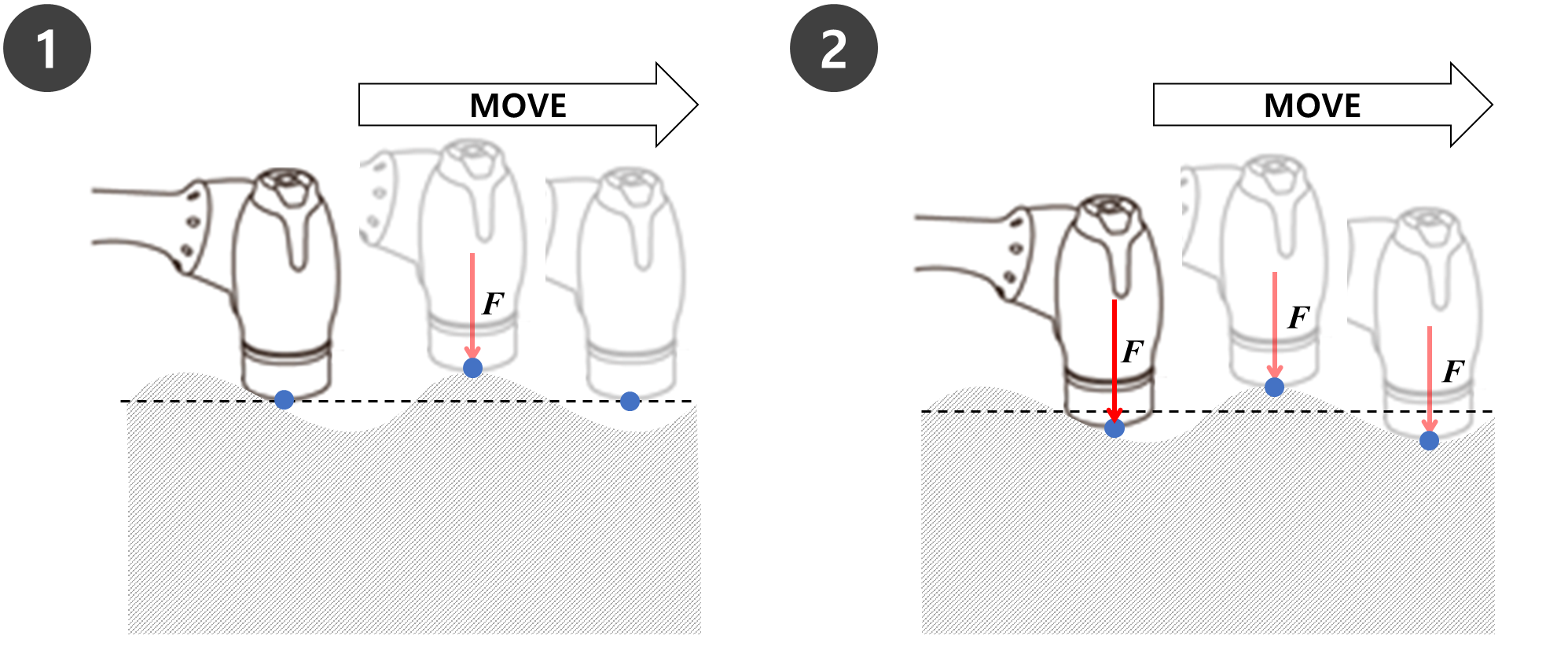
- このアプローチは、ロボットが凹凸のある表面上で直線的に移動しており、ロボット自身や表面に損傷を与えずにロボットが移動することを確認したい場合に利用できます。また、部材付近での予期せぬ衝突を防止するためにも活用できます。
- 強制制御
- 力制御の場合は、ロボットの最後にあるTCPに力が適用されます。力が発生した方向に加速度が発生し、ロボットは動作方向に加えて力の方向にも同時に移動します。
- ロボットが物体に接触すると、その物体に力が加えられ、その力と物体の反発力が均衡するまで作用します。
- このアプローチは、ロボットが凹凸のあるサーフェス上で直線的に移動しており、サーフェスに一定の力を適用する場合に使用できます。これは、ロボットが一定の力で押す必要がある作業、つまり研磨作業にも利用できます。
注
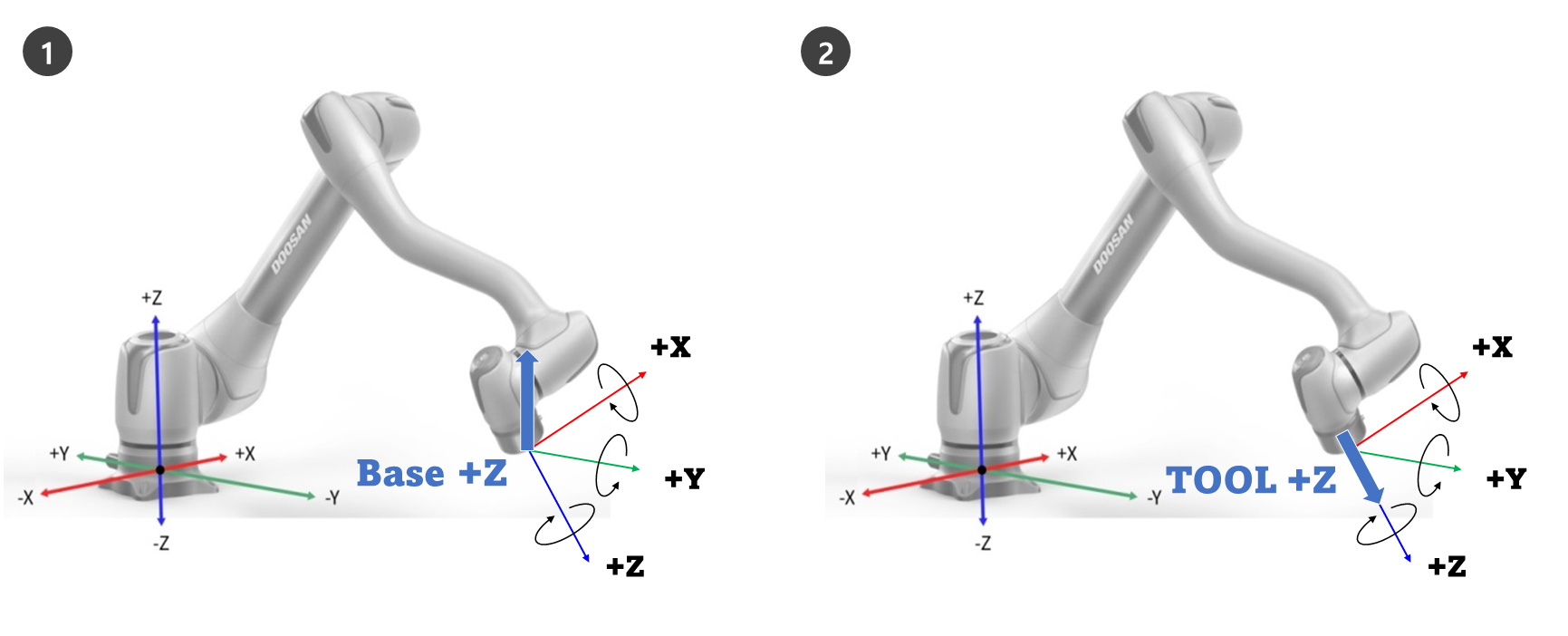
コンプライアンスコマンドと強制コマンドは、現在の座標に基づいて実行されます。タスクのデフォルト座標は基本座標で、座標は[設定]コマンドで変更できます。
- 図 1は、+Z方向の力/コンプライアンス制御がベース座標に適用された場合の動作方向です。
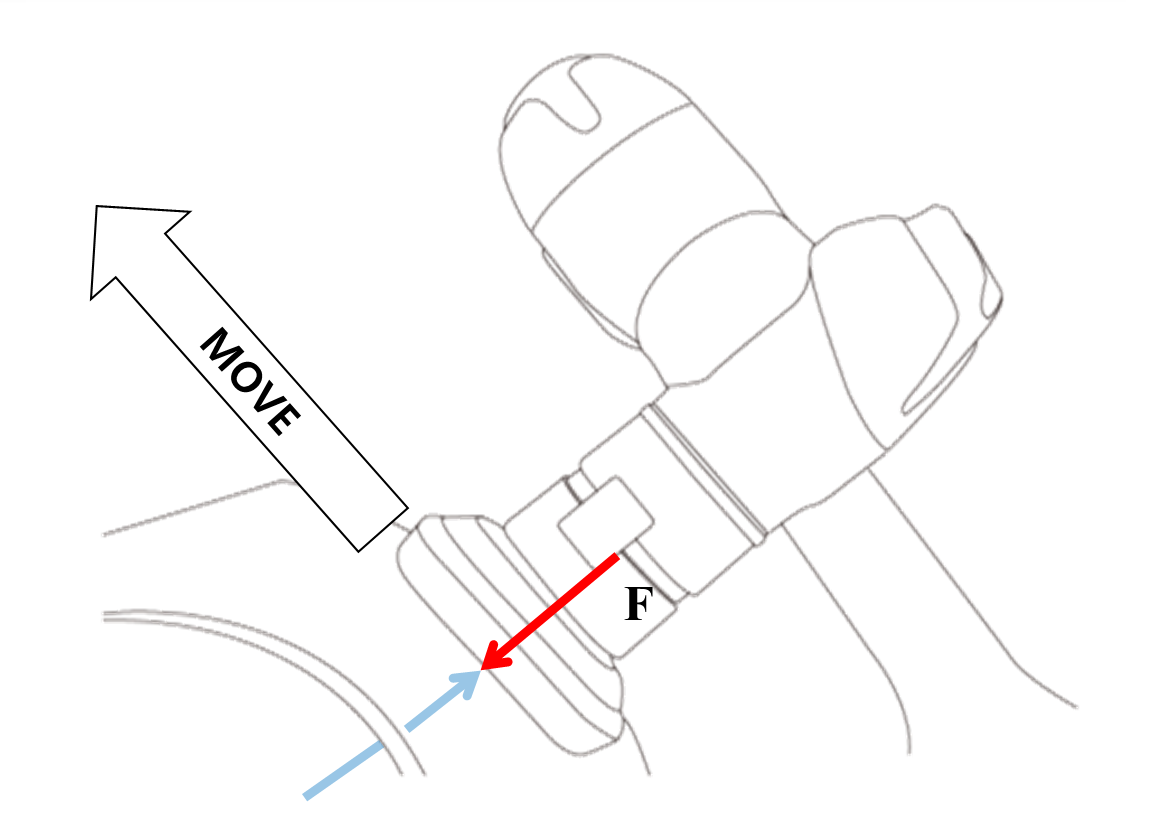
- 図 2は、+Z方向の力/コンプライアンス制御が工具座標に適用された場合の操作方向です。
コンプライアンス管理
コンプライアンス・コントロールとは、ロボットの先端にあるTCOPに力をかけたときに、設定された剛性に応じて外力に適合する機能です。ターゲット点で力をバランスさせ、バランス点から離れた位置で変位が発生した場合に反発力を発生させる制御方法です。コンプライアンス制御中は、ロボットエンドがバネのように跳ね返る。
- モーションコントロールのみを使用しているときに衝突が発生した場合、衝突した物体が損傷する可能性があります。
- 斗山ロボットロボットは、衝突が発生したときに安全に停止しますが 、安全制限>衝突感度などのユーザー設定によっては、以下のような状況が発生する場合があります。
- モーション制御中にコンプライアンス制御がオンに設定されている場合、ロボットは衝突したオブジェクトに準拠しながら移動します。
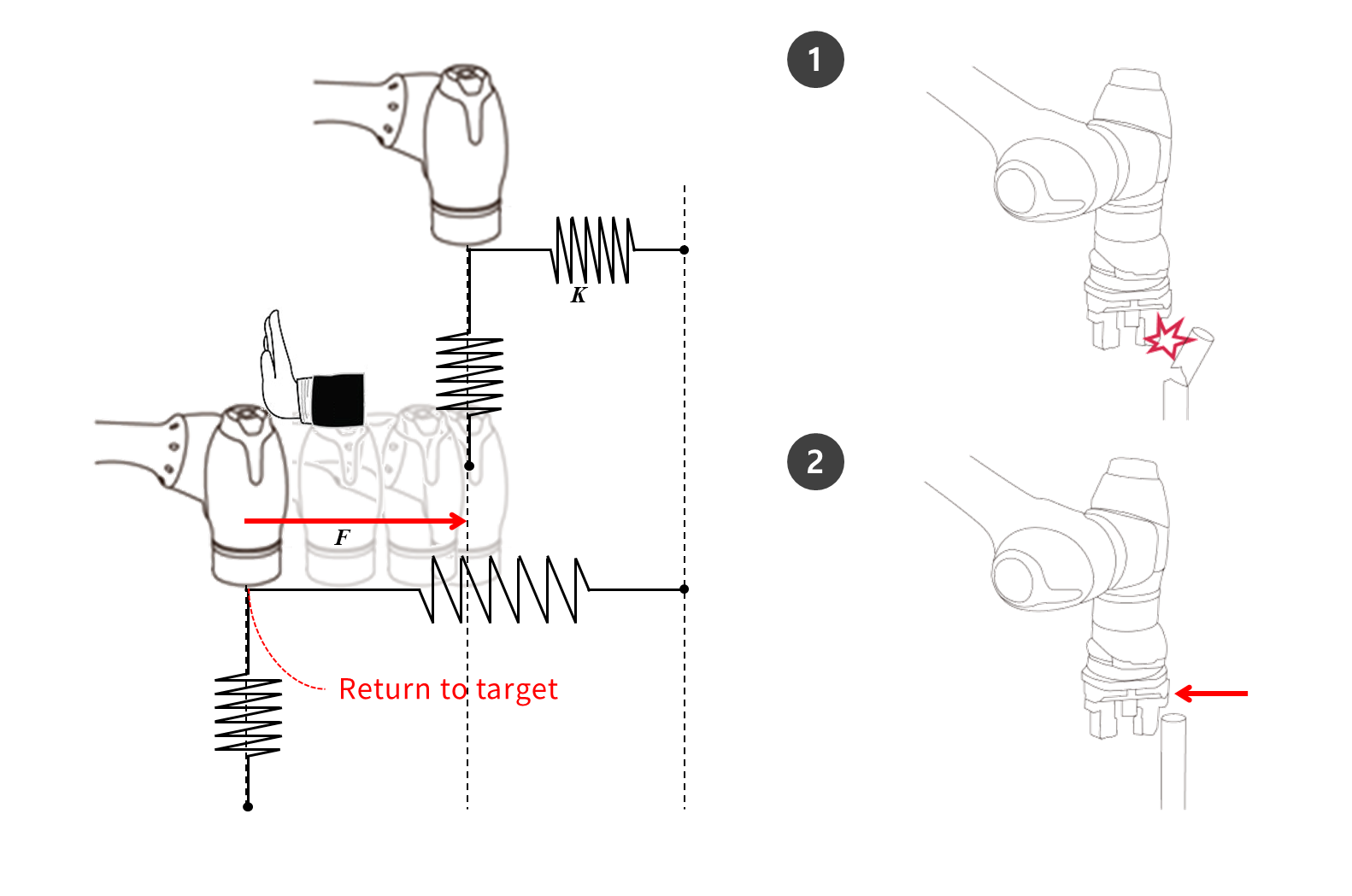
Fが外力、Kが剛性、Xが距離の場合、次の式が成り立つ。
- F = K * X
- K = F/X
- X = F/K
上記の式に基づいて、コンプライアンス制御の剛性が1000N/mに設定されており、ロボットが1mm移動すると、生成される外力は1Nになります。
- F = 1000 N/m * 0.001 m = 1 N(0.001 m = 1 mm)
注
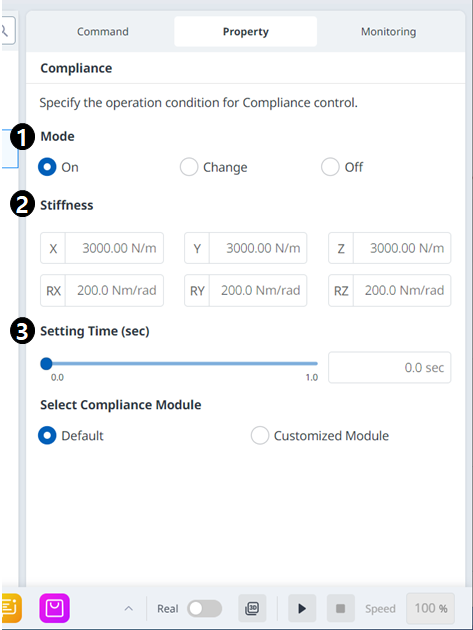
コンプライアンスコマンドのプロパティでは、次の値を設定できます。
- モード
- オン:コンプライアンス管理を可能にする
- 変更:コンプライアンスモードがオンに設定されている場合は、剛性に変更されます。
- オフ:コンプライアンス制御を無効にします
- 剛性範囲
- M/Hシリーズ:平行移動(0 ~ 20000N/m)、回転(0 ~ 1000Nm/rad)
- Aシリーズ:平行移動(0 ~ 10000N/m)、回転(0 ~ 300Nm/rad)
- 剛性値を低くすると、外力により穏やかに反応し、ターゲット点に戻るまでに時間がかかります。
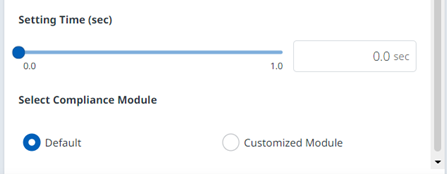
- 時間の設定
- 現在の剛性値が設定された剛性値(0 ~ 1秒)に達するのに必要な時間です。
注意
- 工具重量とTCP(工具中心点)を正確に設定する必要があります。工具重量が不正確な場合、ロボットは工具重量を外力として検出し、コンプライアンス(Compliance)コマンドをオンに設定すると、位置エラーが発生します。
- ドレスパックの張力により、ロボットに外部トルクが発生する可能性があります。したがって、ドレスパックを取り付けるときは注意してください。
- 非同期モーションまたはブレンドモーションの実行中は、コンプライアンスをオンまたはオフにすることはできません。
- コンプライアンスコマンドのオン中は、線形動作のみが許可されます。MoveJやMoveSJなどのジョイント動作は許可されていません。
- コンプライアンスコマンドのオン中、工具重量またはTCPは変更できません。
- コンプライアンス(Compliance)コマンドのオン中に、モーション実行中に生成されるトルクのコンプライアンスのために、目標点に正確に到達できない可能性があります。したがって、ターゲットポイントの近くでコンプライアンス管理をオンにすることをお勧めします。または、大きな剛性値を設定することで、位置誤差を最小限に抑えることができます。
強制制御
力制御は、設定された力と反発力がバランスするまで力制御方向に力を加える機能です。
- ロボットを設定された力方向に移動し、オブジェクトと接触すると、入力された力(N)が維持されます。
- 一定の力を加えながら、力の方向とは異なる方向への運動制御が可能です。
- 最小設定は+/-10Nで、0.2Nの解像度で微調整できます。
- 力制御は特異点ゾーンでは使用できません
- 一般に、コンプライアンス制御は力制御と組み合わせて使用され、力制御は外部の力に準拠します。
注
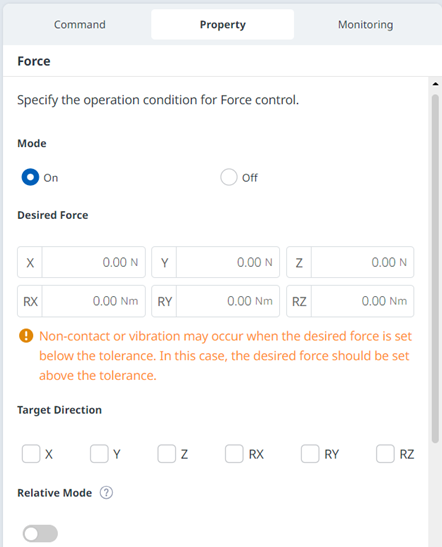
Forceコマンドのプロパティから、以下の値を設定できます。
- モード
- オン:強制制御を有効にします
- オフ:強制制御を無効にします
- 希望する力範囲
- X、Y、Z:10 -(各ロボットの最大数)N
- A、B、C:5 -(各ロボットの最大値)Nm
- 最大荷重の詳細については、を参照 安全パラメータの上下限の範囲と基本値してください。
- ターゲット方向
- 各方向の選択したターゲット値に移動します。
- 複数の選択が可能です。
- 力制御は、力設定後に方向設定でのみ実行できます。
- 選択した複数の方向のいずれかがターゲットフォースに到達した場合'他の方向のターゲット値に到達するまで移動を続けます
- 相対モード
- このモードを有効にすると、ロボットに加えられた外部力が0に較正され、力制御精度が向上します。
- 相対モードを無効にすると、ターゲットに適用される実際の力は、設定された力と外部力の合計に等しくなります。
- 相対モードを有効にすると、ターゲットに適用される実際の力は設定された力と等しくなります。
- 力制御中は、ポーズや外力によって偏差が発生する可能性があります。
- 力制御中は、正確な目標点に到達しない可能性があります。したがって、ターゲットポイントの近くで力制御を有効にすることをお勧めします。
- このモードを有効にすると、ロボットに加えられた外部力が0に較正され、力制御精度が向上します。
- 時間の設定
- 現在の力の値が設定された力の値(0 ~ 1秒)に達するのに必要な時間です。