オイラー角度の概要
オイラー角度は、オブジェクト方向に垂直なX、Y、Z軸の角度を表現する方法です。A、B、Cは順次回転角度を示します。各ロボットメーカーは、このA、B、Cの回転順序をRz-Ry-Rx や Rx-Ry-Rzなど、異なる方法で定義しています。
斗山ロボティクスは Rz-Ry-Rzを使用しています。ここで 、Rz はZ軸の回転を意味し、 Ry はY軸の回転を意味します。Rzは角度A、Ryは角度B、Rzは角度Cとして表され、オブジェクトの現在の回転方向を示します。座標からZ軸方向に回転すると、新しい座標に基づいて回転が行われます。
これはステップ1から4で視覚化できます。
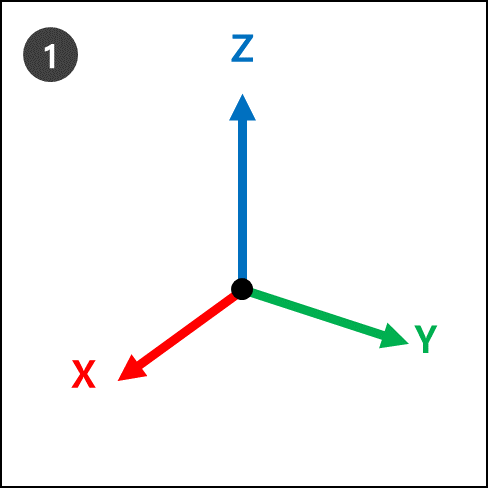
座標(X、Y、Z)があるとします。
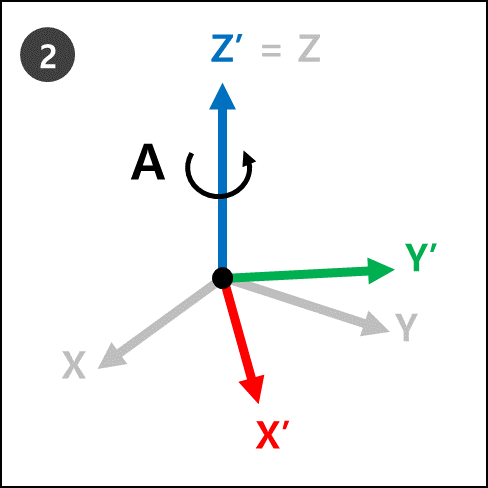
RZ:Z軸から1度回転します。
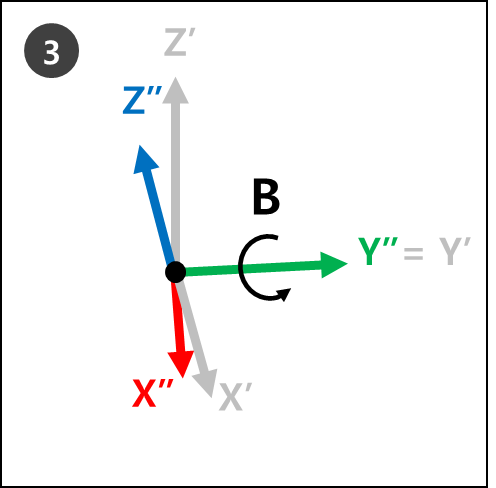
RY :手順2で、新しい座標(X’、Y’、Z’)の新しいY軸(Y’)からB度回転します。
RZ :手順3で、新しい座標(X’、Y’、Z’’’)の新しいZ軸(Z’’’)からB °回転します。
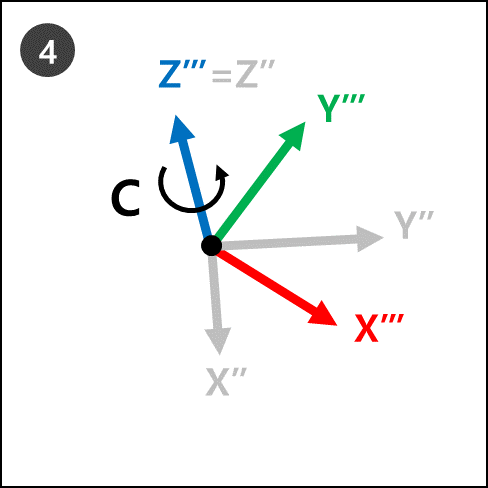
ステップ4の新しい座標(Z’’’’、Y’’’’、X’’’’’’’’’’’は、オイラー角度A、B、Cが適用されたときの現在のロボット回転を指します。
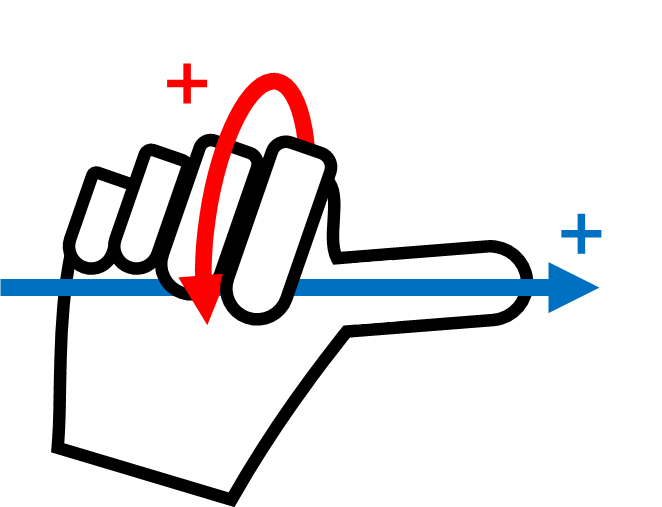
これは右手で簡単に視覚化できます。右手で次のポーズをしてください。これを右手ルールと呼び、親指(X軸)、人差し指(Y軸)、中指(Z軸)を互いに垂直にすることで、X軸、Y軸、Z軸からなる座標が作成されます。
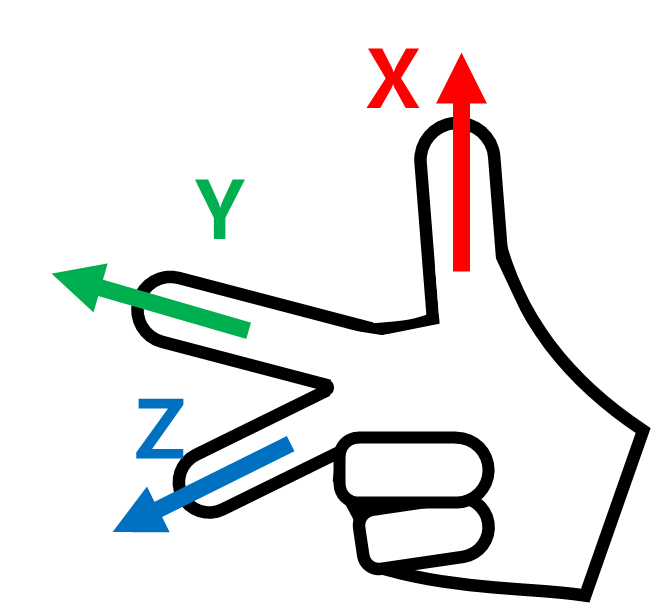
次に、Rule Cartesianポーズを右に作成し、Rz、Ry、Rzを順番に回転させます。
RZ:中指(Z軸)を1度回転します。
RY:人差し指(Y軸)をB度回転させます。
RZ:中指(Z軸)をC度回転させます。
注
A、B、Cの+回転方向は、親指が+方向を指し、4本の指が握られているときの、親指以外の4本の指の方向です。これは時計回りねじの法則と呼ばれます。